You might also like
- Artificial IntelligenceDocument29 pagesArtificial IntelligenceAasthaNo ratings yet
- Lec 05 - AgentsDocument31 pagesLec 05 - AgentsMateen AhmedNo ratings yet
- The Structure of Intelligent AgentsDocument5 pagesThe Structure of Intelligent AgentsJosiah MwashitaNo ratings yet
- By DR Narayana Swamy Ramaiah Professor, Dept of CSE SCSE, FET, JAIN Deemed To Be UniversityDocument27 pagesBy DR Narayana Swamy Ramaiah Professor, Dept of CSE SCSE, FET, JAIN Deemed To Be UniversityDr Narayana Swamy RamaiahNo ratings yet
- Ai 2Document26 pagesAi 2starpapion369No ratings yet
- UNIT1-3 NotesDocument57 pagesUNIT1-3 Notesyoutube channelNo ratings yet
- Agent: Artificial Intelligence Malik Abdul MananDocument22 pagesAgent: Artificial Intelligence Malik Abdul MananJust FunNo ratings yet
- Types of Agents: Nomica ChoudhryDocument19 pagesTypes of Agents: Nomica ChoudhryNomica ImranNo ratings yet
- Week 2Document5 pagesWeek 2susanabdullahi1No ratings yet
- A Gent P R O G R A M S: Agent ProgramsDocument7 pagesA Gent P R O G R A M S: Agent ProgramsS.Srinidhi sandoshkumarNo ratings yet
- Chapter 2 Intelligent AgentDocument32 pagesChapter 2 Intelligent AgentShaller TayeNo ratings yet
- Ai 4Document24 pagesAi 4Kashif MehmoodNo ratings yet
- Chapter Two Intelligent Agent: ObjectiveDocument46 pagesChapter Two Intelligent Agent: ObjectiveTefera KunbushuNo ratings yet
- Intelligent AgentsDocument32 pagesIntelligent AgentsHerimantoNo ratings yet
- AICH2Document38 pagesAICH2Aliyu AhmedNo ratings yet
- AI CH 2Document30 pagesAI CH 2ashenafi endaleNo ratings yet
- 2 Agents+EnvironmentsDocument30 pages2 Agents+EnvironmentsSylvester BelloNo ratings yet
- AI - Agents & EnvironmentsDocument6 pagesAI - Agents & EnvironmentsRainrock BrillerNo ratings yet
- Structure of AgentDocument6 pagesStructure of AgentDEVARAJ PNo ratings yet
- Agents: Agent Environment Sensors ActuatorsDocument20 pagesAgents: Agent Environment Sensors ActuatorsAnuj MehtaNo ratings yet
- Properties of Task EnvironmentDocument2 pagesProperties of Task EnvironmentJatadhar100% (2)
- Agents in AIDocument14 pagesAgents in AIRitam MajumderNo ratings yet
- Lec 1Document21 pagesLec 1Awais AliNo ratings yet
- Ai-Unit 1Document88 pagesAi-Unit 1maharajan241jfNo ratings yet
- Ai 2Document35 pagesAi 2bandookNo ratings yet
- Intelligent AgentsDocument56 pagesIntelligent Agents8mk5n2q8ptNo ratings yet
- Chapter 2 - Inteligent AgentDocument31 pagesChapter 2 - Inteligent AgentDawit AndargachewNo ratings yet
- CS361 Lec 03Document26 pagesCS361 Lec 03Omar AhmedNo ratings yet
- 1b AgentDocument31 pages1b Agentnupurranjan4No ratings yet
- Artificial-Intelligence NotesDocument67 pagesArtificial-Intelligence NotesAditi GoelNo ratings yet
- AI Lecture 4Document15 pagesAI Lecture 4divyakantmevaNo ratings yet
- Chapter 2Document29 pagesChapter 2oromafi tubeNo ratings yet
- CSE440 - Lect - 4 - Agent TypeDocument32 pagesCSE440 - Lect - 4 - Agent TypeSumaiya SadiaNo ratings yet
- Is-Lecture 2 (Intelligent Agents)Document51 pagesIs-Lecture 2 (Intelligent Agents)Arlene AbillonarNo ratings yet
- AI Chapter 2 AgentsDocument28 pagesAI Chapter 2 AgentsSheena KhannaNo ratings yet
- AI Lecture 3Document14 pagesAI Lecture 3divyakantmevaNo ratings yet
- Module III - AI - Agents & EnvironmentsDocument18 pagesModule III - AI - Agents & EnvironmentsEric LaciaNo ratings yet
- Lecture 02Document5 pagesLecture 02lirina4508No ratings yet
- Definition of A Rational AgentDocument4 pagesDefinition of A Rational AgentMitra Roy100% (1)
- LameDocument36 pagesLameleafiaNo ratings yet
- AI CH 2Document38 pagesAI CH 2DESSIE FIKIRNo ratings yet
- Types of AI AgentsDocument3 pagesTypes of AI AgentsShoumiq DeyNo ratings yet
- Lecture3 - 3 - Structure of AgentsDocument22 pagesLecture3 - 3 - Structure of AgentsSurekha SakhareNo ratings yet
- Chapter 2 - Intelligent AgentDocument38 pagesChapter 2 - Intelligent AgentmuhammedNo ratings yet
- Lecture 2: Intelligent AgentsDocument29 pagesLecture 2: Intelligent AgentsB AnaNo ratings yet
- AI - Agents & EnvironmentsDocument7 pagesAI - Agents & Environmentsp229252No ratings yet
- Definition of Ai How AI Applications Work Major Fields of AIDocument6 pagesDefinition of Ai How AI Applications Work Major Fields of AISIDDHANT JAIN 20SCSE1010186No ratings yet
- Agents in Artificial IntelligenceDocument7 pagesAgents in Artificial IntelligenceJAYANTA GHOSHNo ratings yet
- Chapter TwoDocument50 pagesChapter TwoErmias MesfinNo ratings yet
- CHAPTER TwoDocument34 pagesCHAPTER Twoteshu wodesaNo ratings yet
- Fundamentals of Artificial Intelligence: Intelligent AgentsDocument19 pagesFundamentals of Artificial Intelligence: Intelligent AgentsjollyggNo ratings yet
- Ai ch2Document44 pagesAi ch2Ali BhattiNo ratings yet
- Chap2 AIDocument46 pagesChap2 AIshiferawyosef12No ratings yet
- AIES Notes: Intelligent Agents (Lecture 2) : Topics of Lecture OneDocument11 pagesAIES Notes: Intelligent Agents (Lecture 2) : Topics of Lecture OneTIS ArNo ratings yet
- Artificial Intelligence: Intelligent Agent & Problem SolvingDocument33 pagesArtificial Intelligence: Intelligent Agent & Problem SolvingAtif ZamanNo ratings yet
- 2 Intelligent AgentDocument28 pages2 Intelligent AgentSawaira KazmiNo ratings yet
- Agent TypesDocument20 pagesAgent TypesMadaraNo ratings yet
- A.I Lecture 4Document28 pagesA.I Lecture 4Abdul MahmudNo ratings yet
- 3 - C Intelligent AgentDocument22 pages3 - C Intelligent AgentPratik RajNo ratings yet
- Reinforcement Learning Explained - A Step-by-Step Guide to Reward-Driven AIFrom EverandReinforcement Learning Explained - A Step-by-Step Guide to Reward-Driven AINo ratings yet
- JavaApplicationsDocument42 pagesJavaApplicationsSylvester BelloNo ratings yet
- 2 Agents+EnvironmentsDocument30 pages2 Agents+EnvironmentsSylvester BelloNo ratings yet
- ControlStatements Part IDocument25 pagesControlStatements Part ISylvester BelloNo ratings yet
- 1 IntroductionDocument45 pages1 IntroductionSylvester BelloNo ratings yet
- ControlStatements Part IIIDocument26 pagesControlStatements Part IIISylvester BelloNo ratings yet
- 1 PythonBasicsDocument10 pages1 PythonBasicsSylvester BelloNo ratings yet
- History of Coca-Cola: Origins of The FormulaDocument2 pagesHistory of Coca-Cola: Origins of The FormulaSylvester BelloNo ratings yet
- Tutorial Letter 103/0/2023Document41 pagesTutorial Letter 103/0/2023MishumoNo ratings yet
- Purposive Communication Chapter 5Document34 pagesPurposive Communication Chapter 5Anne Wong0% (1)
- Philippine Popular CultureDocument9 pagesPhilippine Popular CultureMini DachshundNo ratings yet
- Understanding The SelfDocument12 pagesUnderstanding The SelfJE QUEST100% (1)
- Design and Optimization of Order Picking Systems An Integrated Procedureand Two Case StudiesDocument17 pagesDesign and Optimization of Order Picking Systems An Integrated Procedureand Two Case Studiespert pattameeNo ratings yet
- PE 3 - Module 1Document8 pagesPE 3 - Module 1Lyka ArguellesNo ratings yet
- BS Psychology Scheme of StudyDocument3 pagesBS Psychology Scheme of StudyJokerNo ratings yet
- Date Sheet - Mid Term Examination - January 2021 Grade: AS LevelDocument3 pagesDate Sheet - Mid Term Examination - January 2021 Grade: AS LevelAaraiz GhaniNo ratings yet
- Steven A.Y. Poelmans - Work and Family - An International Research Perspective (Series in Applied Psychology) (2005)Document552 pagesSteven A.Y. Poelmans - Work and Family - An International Research Perspective (Series in Applied Psychology) (2005)Ramiro100% (1)
- My ReportDocument52 pagesMy ReportSanzu SangroulaNo ratings yet
- ACSS-271, Unit-2Document20 pagesACSS-271, Unit-2Aditya SahaNo ratings yet
- Title of The Paper (Use Title Style) : Original Article Original Article Original ArticleDocument5 pagesTitle of The Paper (Use Title Style) : Original Article Original Article Original ArticleMuhammad Mushlih ElhafidNo ratings yet
- A Hierarchical Model of Cognitive Flexibility in Children: Extending The Relationship Between Flexibility, Creativity and Academic AchievementDocument32 pagesA Hierarchical Model of Cognitive Flexibility in Children: Extending The Relationship Between Flexibility, Creativity and Academic AchievementNikoletta AslanidiNo ratings yet
- PR 2Document18 pagesPR 2Irish VillanuevaNo ratings yet
- Teacher Observation Tool Field Study Research ReportDocument33 pagesTeacher Observation Tool Field Study Research ReportAdama DoumbiaNo ratings yet
- Fruits & Vegetable Classification and Calories Measurement SystemDocument2 pagesFruits & Vegetable Classification and Calories Measurement SystemNationalinstituteDsnrNo ratings yet
- Fake Indian Currency Detection Using Deep LearningDocument6 pagesFake Indian Currency Detection Using Deep LearningtilahunNo ratings yet
- Sansom, D. W. (2019) - Investigating Processes of Change in Beliefs and Practice Following Professional Development - Multiple Change Models Among In-Service Teachers in ChinaDocument16 pagesSansom, D. W. (2019) - Investigating Processes of Change in Beliefs and Practice Following Professional Development - Multiple Change Models Among In-Service Teachers in ChinaTaris TallasaNo ratings yet
- Business Research Methods: Unit 1Document77 pagesBusiness Research Methods: Unit 1Shreya DikshitNo ratings yet
- Factors Affecting Work Life Balance of Grade 11 Students Chapter 12Document21 pagesFactors Affecting Work Life Balance of Grade 11 Students Chapter 12heesunglee950No ratings yet
- Unit 502 Understanding and Unit AmplificationDocument34 pagesUnit 502 Understanding and Unit Amplificationundan.uk3234No ratings yet
- Click Here For A C Haddon PresentationDocument23 pagesClick Here For A C Haddon PresentationDaniel MulugetaNo ratings yet
- Digital PaymentDocument26 pagesDigital PaymentMotivation GirlNo ratings yet
- Tle Tos - G10 CookeryDocument2 pagesTle Tos - G10 CookeryJOVIELYN ORPILLANo ratings yet
- Organizational LeadershipDocument22 pagesOrganizational Leadershipwarda wisaalNo ratings yet
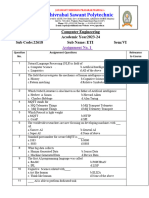
- ETI Assignment-1Document2 pagesETI Assignment-1sawaserohit0No ratings yet
- Unit 5 Learning Aim D HintsheetDocument5 pagesUnit 5 Learning Aim D HintsheetFanta SwirlNo ratings yet
- DISS Week 5 BernadetteAspirasDocument16 pagesDISS Week 5 BernadetteAspirasRaymart DiaperaNo ratings yet
- Letters and NumbersDocument1 pageLetters and Numbersking crocsNo ratings yet
- The Project Management Feedback and Control SystemDocument6 pagesThe Project Management Feedback and Control SystemInnoe malon MachingaNo ratings yet