You might also like
- Design and Analysis of Outer Segmental Rotor Synchronous Reluctance Machine For Future Electric BikeDocument5 pagesDesign and Analysis of Outer Segmental Rotor Synchronous Reluctance Machine For Future Electric BikeBatuhan SincanNo ratings yet
- Bidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesDocument6 pagesBidirectional DC-DC Converter For Incorporating Regenerative Braking in E-BikesOscar Olarte OrtizNo ratings yet
- In wheelMotorDesignforanElectricScooterDocument11 pagesIn wheelMotorDesignforanElectricScooterTejas JadhavNo ratings yet
- In wheelMotorDesignforanElectricScooterDocument11 pagesIn wheelMotorDesignforanElectricScooterVishal ThakurNo ratings yet
- In WheelMotorDesignforanElectricScooterDocument11 pagesIn WheelMotorDesignforanElectricScooterNguyen Phan LamNo ratings yet
- Critical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesDocument12 pagesCritical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesFrankenstein ReichNo ratings yet
- Design and Analysis of Electric two/three-wheeler bike Hub-MotorDocument7 pagesDesign and Analysis of Electric two/three-wheeler bike Hub-MotorRealistic ProductsNo ratings yet
- Car Examples ComparisonDocument14 pagesCar Examples ComparisonNigamanand RaoNo ratings yet
- Friction EstimationDocument6 pagesFriction EstimationPietroNo ratings yet
- Modeling and Analysis of Electric Motors State of The Art ReviewDocument18 pagesModeling and Analysis of Electric Motors State of The Art Reviewpradeep shindeNo ratings yet
- Electric Vehicle ConfDocument7 pagesElectric Vehicle ConfAhmed MoosaniNo ratings yet
- E BikeDocument7 pagesE Bikevivek choudharyNo ratings yet
- Proposal Fyp - Electric Motorcycle Frame - 2020452816Document10 pagesProposal Fyp - Electric Motorcycle Frame - 2020452816mohammad ikhmal faiezNo ratings yet
- Design and Fabrication of Electric BicycleDocument4 pagesDesign and Fabrication of Electric BicycleSachinhonnatti SachinhonnattiNo ratings yet
- Starter Alternator MicroHybrid CarDocument7 pagesStarter Alternator MicroHybrid CartomNo ratings yet
- National Instruments' Compactrio and Labview: Electric Vehicle Energy Management System UsingDocument6 pagesNational Instruments' Compactrio and Labview: Electric Vehicle Energy Management System UsingAli KarasukogluNo ratings yet
- Design and Fabrication of Electric Bicycle IJERTCONV6IS04057 PDFDocument4 pagesDesign and Fabrication of Electric Bicycle IJERTCONV6IS04057 PDFPravéén RajNo ratings yet
- Design Approach For Electric Bikes Using Battery and Super Capacitor For Performance ImprovementDocument6 pagesDesign Approach For Electric Bikes Using Battery and Super Capacitor For Performance ImprovementBatuhan SincanNo ratings yet
- Chassis Dynamometer For Electric Two WheelersDocument5 pagesChassis Dynamometer For Electric Two Wheelersdani chNo ratings yet
- A Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesDocument4 pagesA Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesGabriel de SáNo ratings yet
- p953-961 - Design of Six Seater Electrical Vehicle (Golf Cart)Document9 pagesp953-961 - Design of Six Seater Electrical Vehicle (Golf Cart)Vûmmïttî ChañðĥâñNo ratings yet
- Esgin Skaboard PDFDocument11 pagesEsgin Skaboard PDFJimmy Joel ColqueNo ratings yet
- Hybrid Vehicle ReportDocument17 pagesHybrid Vehicle ReportMidhun S Jacob100% (1)
- Feasibility_Study_Designing_Electric_Motorcycles_WDocument7 pagesFeasibility_Study_Designing_Electric_Motorcycles_WMichael MuntuuntuNo ratings yet
- Design and Fabrication of Electric BicycleDocument4 pagesDesign and Fabrication of Electric BicycleInternational Journal of Innovations in Engineering and Science0% (1)
- 111 Study NCDocument8 pages111 Study NCARUN VNo ratings yet
- Irjet V8i6115Document17 pagesIrjet V8i6115Jibiñ Raj JibiñNo ratings yet
- Icem 2020Document8 pagesIcem 2020rasoolNo ratings yet
- Electric Vehicle Design Study Improves EV Powertrain EfficiencyDocument8 pagesElectric Vehicle Design Study Improves EV Powertrain EfficiencyCarl AriffNo ratings yet
- AC Motors For Application in A Commercial Electric Vehicle: Designing AspectsDocument5 pagesAC Motors For Application in A Commercial Electric Vehicle: Designing Aspectsabde samadNo ratings yet
- A Review On Different Aspects of Traction Motor Design For Railway ApplicationDocument10 pagesA Review On Different Aspects of Traction Motor Design For Railway ApplicationMt GolesNo ratings yet
- Electric MotorcycleDocument9 pagesElectric MotorcycleNaveen AgrawalNo ratings yet
- Converting Conventional Bike Into E-Bike: Design & Fabrication "A Concept"Document11 pagesConverting Conventional Bike Into E-Bike: Design & Fabrication "A Concept"International Journal of Technology and Emerging Sciences (IJTES)No ratings yet
- Design and Prototyping of Micro Mobility Electric VehicleDocument5 pagesDesign and Prototyping of Micro Mobility Electric VehicleIJRASETPublicationsNo ratings yet
- Design & Development of E-Bike - A Review: © NOV 2017 - IRE Journals - Volume 1 Issue 5 - ISSN: 2456-8880Document8 pagesDesign & Development of E-Bike - A Review: © NOV 2017 - IRE Journals - Volume 1 Issue 5 - ISSN: 2456-8880Vivek GavaliNo ratings yet
- Design and Fabrication of Electric BikeDocument8 pagesDesign and Fabrication of Electric BikeInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Motores de Imánes Permanentes y de InductanciaDocument5 pagesMotores de Imánes Permanentes y de InductanciaFreddy Julián Chipugsi CaleroNo ratings yet
- Design of Electric Vehicle: A Real Time Case Study: V.Suresh Kumar B. DeviDocument14 pagesDesign of Electric Vehicle: A Real Time Case Study: V.Suresh Kumar B. DeviChandrasekaran NNo ratings yet
- Design of electric motor using coupled electromagnetic and structural analysis and optimizationDocument7 pagesDesign of electric motor using coupled electromagnetic and structural analysis and optimizationCầu CaoNo ratings yet
- Prodotti 7 01703710Document9 pagesProdotti 7 01703710Julius RojoNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- Car 2Document14 pagesCar 2SanthoshNo ratings yet
- Design and fabrication of electric bike with sliding frameDocument6 pagesDesign and fabrication of electric bike with sliding frameThanh Son NguyenNo ratings yet
- Paper 19Document6 pagesPaper 19BabiNo ratings yet
- Journal Paper PDFDocument6 pagesJournal Paper PDFsandy66542No ratings yet
- Articulo IJETTDocument14 pagesArticulo IJETTFranklin Alcarraz AlegriaNo ratings yet
- Reserch Pepar of Free Energy Bike 1Document4 pagesReserch Pepar of Free Energy Bike 1Jogendra GhodkeNo ratings yet
- An Induction Motor Design For Urban Use Electric Vehicle: September 2016Document7 pagesAn Induction Motor Design For Urban Use Electric Vehicle: September 2016izzaty ariffNo ratings yet
- Design Parameter and Simulation Analysis of Electric Bike Using Bi-Directional Power ConverterDocument6 pagesDesign Parameter and Simulation Analysis of Electric Bike Using Bi-Directional Power ConverterwilliamNo ratings yet
- C B DC M e B e C 8-B MDocument9 pagesC B DC M e B e C 8-B MIshwar GophaneNo ratings yet
- Design, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDocument14 pagesDesign, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDavid AzadNo ratings yet
- .Design and Fabrication of Regenerative Electric BikeDocument4 pages.Design and Fabrication of Regenerative Electric BikePugazhenthi RajagopalNo ratings yet
- Electrical SystemDocument15 pagesElectrical SystemHeartking BibhuNo ratings yet
- Retrofitting of Internal Combustion Scooter Using Electric Power SourceDocument8 pagesRetrofitting of Internal Combustion Scooter Using Electric Power SourceKorangi ErumaiNo ratings yet
- Epi CyclicDocument10 pagesEpi CyclicAdarsh ShindeNo ratings yet
- Drive Selection For Electric Kart: October 2010Document5 pagesDrive Selection For Electric Kart: October 2010jordy gonzalezNo ratings yet
- Morand in 2015Document10 pagesMorand in 2015suyash kandiNo ratings yet
- M. Tech. Electrical Engineering Semester II Control of Electric Drives LPWDocument1 pageM. Tech. Electrical Engineering Semester II Control of Electric Drives LPWTejas PanchalNo ratings yet
- Energies 15 05782 v2Document24 pagesEnergies 15 05782 v2Tejas PanchalNo ratings yet
- Syllabus - Control of Electric DrivesDocument2 pagesSyllabus - Control of Electric DrivesTejas PanchalNo ratings yet
- Analysis of Flux Barrier Effect of LCF PM in Series Hybrid Magnet Variable Flux Memory MachineDocument8 pagesAnalysis of Flux Barrier Effect of LCF PM in Series Hybrid Magnet Variable Flux Memory MachineTejas PanchalNo ratings yet
- The Robust Design Approach For Reducing Cogging Torque in Permanent Magnet MotorsDocument3 pagesThe Robust Design Approach For Reducing Cogging Torque in Permanent Magnet MotorsTejas PanchalNo ratings yet
- Mitigation of Cogging Torque For The Optimal Design of BLDC MotorDocument5 pagesMitigation of Cogging Torque For The Optimal Design of BLDC MotorTejas PanchalNo ratings yet
- Design and Simulation of Permanent Magnet Brushless DC Motor For Small-Sized Load UAVDocument5 pagesDesign and Simulation of Permanent Magnet Brushless DC Motor For Small-Sized Load UAVTejas PanchalNo ratings yet
- Design and Modelling of Internal Permanent Magnet Motor (#764846) - 1189475Document25 pagesDesign and Modelling of Internal Permanent Magnet Motor (#764846) - 1189475Tejas PanchalNo ratings yet
- IJSTR TemplateDocument4 pagesIJSTR TemplateGiridhar ParameswaranNo ratings yet
- FiguresDocument3 pagesFiguresTejas PanchalNo ratings yet
- TF TemplateDocument3 pagesTF TemplateTejas PanchalNo ratings yet
- Multiobjective Optimization of Axial Flux PMBLDC Motor PDFDocument20 pagesMultiobjective Optimization of Axial Flux PMBLDC Motor PDFTejas PanchalNo ratings yet
- Coding and Decoding Practice TestDocument13 pagesCoding and Decoding Practice TestRaja SubramanianNo ratings yet
- LP Exemplar in English 9 Verbal and Non VerbalDocument3 pagesLP Exemplar in English 9 Verbal and Non VerbalBaby Lyn Oamil EusebioNo ratings yet
- BSM and NSM Best Practice 66Document67 pagesBSM and NSM Best Practice 66Freelancer83No ratings yet
- Myntra Sku Template New ShootDocument204 pagesMyntra Sku Template New ShootPriyal SaxenaNo ratings yet
- OSTEOARTHRITISDocument53 pagesOSTEOARTHRITISRiza Umami100% (1)
- Appendix A. Second QuantizationDocument24 pagesAppendix A. Second QuantizationAgtc TandayNo ratings yet
- Three Phase Traffic Theory PDFDocument11 pagesThree Phase Traffic Theory PDFKocic GradnjaNo ratings yet
- 2D TransformationDocument38 pages2D TransformationSarvodhya Bahri0% (1)
- Let's think step by step:- The common factor of 32, 45 and 50 is 5- 32/5 = 6.4 meters - 45/5 = 9 meters- 50/5 = 10 meters- So the best option is the 50 meter wire.b. How did you get the answerDocument59 pagesLet's think step by step:- The common factor of 32, 45 and 50 is 5- 32/5 = 6.4 meters - 45/5 = 9 meters- 50/5 = 10 meters- So the best option is the 50 meter wire.b. How did you get the answerjsphmnsycjrscribdNo ratings yet
- HOPE 3A MODULE 1 Introduction To DanceDocument13 pagesHOPE 3A MODULE 1 Introduction To DanceLeo PatrickNo ratings yet
- Assessment of Blast Furnace Behaviour Through Softening-Melting TestDocument10 pagesAssessment of Blast Furnace Behaviour Through Softening-Melting TestvidhyasagarNo ratings yet
- Final Research Dossier - Joey KassenoffDocument11 pagesFinal Research Dossier - Joey Kassenoffapi-438481986No ratings yet
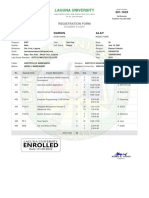
- Darius Registration Form 201 1623 2nd Semester A.Y. 2021 2022Document1 pageDarius Registration Form 201 1623 2nd Semester A.Y. 2021 2022Kristilla Anonuevo CardonaNo ratings yet
- Why We Can't Stop Obsessing Over CelebritiesDocument2 pagesWhy We Can't Stop Obsessing Over CelebritiesJoseMa AralNo ratings yet
- Units 3 - 4 Workshop A2Document3 pagesUnits 3 - 4 Workshop A2S4N7Y PRONo ratings yet
- Internal and external factors affecting pricing decisionsDocument6 pagesInternal and external factors affecting pricing decisionsNguyễn YếnNo ratings yet
- Stanford MSE FlowchartDocument1 pageStanford MSE FlowchartJoseyNo ratings yet
- Pilani MTech SS PDFDocument12 pagesPilani MTech SS PDFonline accountNo ratings yet
- 0000 0000 0335Document40 pages0000 0000 0335Hari SetiawanNo ratings yet
- February 2023Document2 pagesFebruary 2023rohitchanakya76No ratings yet
- BGP Basic in Comware 7Document8 pagesBGP Basic in Comware 7felipemunozmoraNo ratings yet
- Illuminism - The Occult Force Behind Globalization - by Wes PenreDocument98 pagesIlluminism - The Occult Force Behind Globalization - by Wes Penrebreiard100% (1)
- Quantum Dot PDFDocument22 pagesQuantum Dot PDFALI ASHRAFNo ratings yet
- HR Interview QuestionsDocument6 pagesHR Interview QuestionsnavneetjadonNo ratings yet
- Spent Caustic Recycle at Farleigh MillDocument9 pagesSpent Caustic Recycle at Farleigh MillyamakunNo ratings yet
- CPG Prevention, Diagnosis & Management of IE PDFDocument182 pagesCPG Prevention, Diagnosis & Management of IE PDFsigitNo ratings yet
- Guided Reading Activity: The Reach of ImperialismDocument2 pagesGuided Reading Activity: The Reach of ImperialismevertNo ratings yet
- General Dynamics F-16 Fighting Falcon - Wikipedia, The Free EncyclopediaDocument28 pagesGeneral Dynamics F-16 Fighting Falcon - Wikipedia, The Free EncyclopediaJulie MerrillNo ratings yet
- PHY3201Document3 pagesPHY3201Ting Woei LuenNo ratings yet
- Oracle VMDocument243 pagesOracle VMАскандар Каландаров100% (1)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet