You might also like
- Application of Direct Drive Wheel Motor For Fuel Cell Electric and Hybrid ElectricDocument7 pagesApplication of Direct Drive Wheel Motor For Fuel Cell Electric and Hybrid ElectricMirela VihacencuNo ratings yet
- Electromagnetic Design of SynchronousDocument6 pagesElectromagnetic Design of SynchronousedumacerenNo ratings yet
- Electric Motor DrivesDocument8 pagesElectric Motor DrivesshillerNo ratings yet
- Design and Optimization of Slotted Stator Tooth Switched Reluctance Motor For Torque/ Enhancement For Electric Vehicle ApplicationsDocument8 pagesDesign and Optimization of Slotted Stator Tooth Switched Reluctance Motor For Torque/ Enhancement For Electric Vehicle ApplicationsrajalingamNo ratings yet
- A17. Six-Phase Fractional-Slot-per-Pole-per-Phase Permanent-Magnet Machines With Low Space Harmonics For Electric Vehicle ApplicationDocument10 pagesA17. Six-Phase Fractional-Slot-per-Pole-per-Phase Permanent-Magnet Machines With Low Space Harmonics For Electric Vehicle Applicationwalidghoneim1970No ratings yet
- A Review of Structural and Thermal Analysis of Traction MotorsDocument11 pagesA Review of Structural and Thermal Analysis of Traction MotorsGari PastranaNo ratings yet
- Thermal Analysis of Induction and Synchronous Reluctance MotorsDocument6 pagesThermal Analysis of Induction and Synchronous Reluctance MotorsShraddha kaleNo ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- Analysis of An Axial PM Ux Machine With Field Weakening Capability For Engine IntegrationDocument7 pagesAnalysis of An Axial PM Ux Machine With Field Weakening Capability For Engine IntegrationManjuBhashiniNo ratings yet
- Design Permanent Magnet Motor Water Jacket Cooled MotorDocument5 pagesDesign Permanent Magnet Motor Water Jacket Cooled Motorhpham2005No ratings yet
- Starter Alternator MicroHybrid CarDocument7 pagesStarter Alternator MicroHybrid CartomNo ratings yet
- Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives For EV and HEV ApplicationsDocument10 pagesComparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives For EV and HEV Applicationskhodabandelou100% (1)
- Design of Axial-Flux Motor For Traction ApplicatioDocument13 pagesDesign of Axial-Flux Motor For Traction Applicatioantriksh mahajanNo ratings yet
- Abstract:: Design Modification and Analysis of V6 Engine Mounting BracketDocument7 pagesAbstract:: Design Modification and Analysis of V6 Engine Mounting BracketInternational Journal of Engineering and TechniquesNo ratings yet
- Design of Electric Motor Using Coupled Electromagnetic and Structural Analysis and OptimizationDocument7 pagesDesign of Electric Motor Using Coupled Electromagnetic and Structural Analysis and OptimizationCầu CaoNo ratings yet
- Electric Power Systems Research: Erkan Mese, Yusuf Yasa, Baris T. Ertugrul, Eyup SincarDocument11 pagesElectric Power Systems Research: Erkan Mese, Yusuf Yasa, Baris T. Ertugrul, Eyup Sincarbryan andres mora ramosNo ratings yet
- Introduction To SEMA Motor Technology: June 2005Document4 pagesIntroduction To SEMA Motor Technology: June 2005bwarner6986No ratings yet
- 2018 IEEETrans On IASUKSpark Corelessvs Conventional Solar CarDocument11 pages2018 IEEETrans On IASUKSpark Corelessvs Conventional Solar CarKhắc Trung VũNo ratings yet
- Sae2023 01 1074Document8 pagesSae2023 01 1074Joanne WNo ratings yet
- Torque Ripple Analysis of A PM Brushless DC Motor Using Finite Element MethodDocument7 pagesTorque Ripple Analysis of A PM Brushless DC Motor Using Finite Element MethodMoathNo ratings yet
- Design and Manufacture Issues of A 100 000 RPM Micro-Turbine Electric Generator SystemDocument7 pagesDesign and Manufacture Issues of A 100 000 RPM Micro-Turbine Electric Generator SystemGiovanni GiudiceNo ratings yet
- Thesis Electric MotorDocument5 pagesThesis Electric Motorgjd6bfa4100% (2)
- Energies 15 00694 With CoverDocument18 pagesEnergies 15 00694 With Coverpdseetharam009No ratings yet
- Design and Analysis of An Epicyclic Gearbox For An Electric DrivetrainDocument9 pagesDesign and Analysis of An Epicyclic Gearbox For An Electric DrivetrainNajrul IslamNo ratings yet
- Motor Primer IIIDocument8 pagesMotor Primer IIItristanfernandes2179No ratings yet
- Research On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesDocument12 pagesResearch On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesedumacerenNo ratings yet
- 10 0000@www Sae Org@2019-26-0116Document7 pages10 0000@www Sae Org@2019-26-0116JasonNo ratings yet
- Design of Axial Flux Permanent Magnet Brushless DC Motor For Direct Drive of Electric VehicleDocument6 pagesDesign of Axial Flux Permanent Magnet Brushless DC Motor For Direct Drive of Electric Vehiclegrun.jpgNo ratings yet
- Development of An SRM-based Drive For Built-In Automotive Vacuum CleanersDocument11 pagesDevelopment of An SRM-based Drive For Built-In Automotive Vacuum CleanersBobur KurbonovNo ratings yet
- Nonconventional Three Wheel Electric VehDocument7 pagesNonconventional Three Wheel Electric VehAbdelali AabadaNo ratings yet
- Icem 2020Document8 pagesIcem 2020rasoolNo ratings yet
- Consideraciones de Diseño para Un Freno Magnetorreológico AutomotrizDocument14 pagesConsideraciones de Diseño para Un Freno Magnetorreológico AutomotrizYisus ÅkerfeldtNo ratings yet
- Btech Final Year Project Report PDFDocument25 pagesBtech Final Year Project Report PDFShaiz AkhtarNo ratings yet
- EasyChair Preprint 6319Document7 pagesEasyChair Preprint 6319Realistic ProductsNo ratings yet
- Ravisankar 2021 IOP Conf. Ser. Mater. Sci. Eng. 1055 012132Document16 pagesRavisankar 2021 IOP Conf. Ser. Mater. Sci. Eng. 1055 012132tejas9280No ratings yet
- Epi CyclicDocument10 pagesEpi CyclicAdarsh ShindeNo ratings yet
- Clamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachDocument10 pagesClamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachHsan HaddarNo ratings yet
- Design Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEADocument5 pagesDesign Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEASuman SahaNo ratings yet
- Design of IPM Synchronous Motor For Gearless Elevator ApplicationsDocument7 pagesDesign of IPM Synchronous Motor For Gearless Elevator Applicationsرجل من الزمن الجميلNo ratings yet
- Rotor Design Optimization of Squirrel CageDocument8 pagesRotor Design Optimization of Squirrel CageAwal UdinNo ratings yet
- In wheelMotorDesignforanElectricScooterDocument11 pagesIn wheelMotorDesignforanElectricScooterTejas JadhavNo ratings yet
- Referensi Generator V-ShapeDocument13 pagesReferensi Generator V-ShapeRio YudhistiraNo ratings yet
- Design & Fabrication of Four Wheeler Hydraulic Jack.Document8 pagesDesign & Fabrication of Four Wheeler Hydraulic Jack.Ss KalagiNo ratings yet
- Connecting Rod Analysis ThesisDocument6 pagesConnecting Rod Analysis ThesisCanYouWriteMyPaperForMeUK100% (1)
- FEM Based Design and Performance Analysis of 2-Poles Universal MotorDocument15 pagesFEM Based Design and Performance Analysis of 2-Poles Universal MotorBalaji DDNo ratings yet
- Torque Ripple MitigationDocument20 pagesTorque Ripple MitigationSanjayNo ratings yet
- Water Cooled Axial Flux Motor High TorqueDocument7 pagesWater Cooled Axial Flux Motor High TorqueSteven SullivanNo ratings yet
- Ijert Ijert: Engine Mounts and Its Design ConsiderationsDocument8 pagesIjert Ijert: Engine Mounts and Its Design ConsiderationsGulsan PratapNo ratings yet
- Thesis Switched Reluctance MotorDocument6 pagesThesis Switched Reluctance Motormelissalusternorman100% (2)
- Effect of Rotor Bars Shape On The Single-Phase Induction Motors Performance: An Analysis Toward Their Efficiency ImprovementDocument25 pagesEffect of Rotor Bars Shape On The Single-Phase Induction Motors Performance: An Analysis Toward Their Efficiency ImprovementDr. Aslan JalalNo ratings yet
- Qi2020 Article DesignAndResearchOfDeepSlotUniDocument13 pagesQi2020 Article DesignAndResearchOfDeepSlotUniArunNo ratings yet
- In WheelMotorDesignforanElectricScooterDocument11 pagesIn WheelMotorDesignforanElectricScooterNguyen Phan LamNo ratings yet
- Trilogy Linear Motor Engineering Reference GuideDocument12 pagesTrilogy Linear Motor Engineering Reference Guidequockhanh310No ratings yet
- AC Motors For Application in A Commercial Electric Vehicle: Designing AspectsDocument5 pagesAC Motors For Application in A Commercial Electric Vehicle: Designing Aspectsabde samadNo ratings yet
- Ijett V38P253 PDFDocument7 pagesIjett V38P253 PDFKaustubh DwivediNo ratings yet
- Magnet Gear ShiftingDocument2 pagesMagnet Gear ShiftingShivam KohliNo ratings yet
- Delft University of TechnologyDocument18 pagesDelft University of TechnologyCurro Espadafor Fernandez AmigoNo ratings yet
- SCI - Volume 29 - Issue 5 - Pages 2537-2551Document15 pagesSCI - Volume 29 - Issue 5 - Pages 2537-2551Vaishnavi BharatiNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Us 9050873Document24 pagesUs 9050873Julius RojoNo ratings yet
- PH32014000897 DRW Images-S1 ENDocument7 pagesPH32014000897 DRW Images-S1 ENJulius RojoNo ratings yet
- Marizan 27Document12 pagesMarizan 27Julius RojoNo ratings yet
- Energies 15 00122 v3Document13 pagesEnergies 15 00122 v3Julius RojoNo ratings yet
- RGVDIPaperDocument7 pagesRGVDIPaperJulius RojoNo ratings yet
- V6i3 1423Document6 pagesV6i3 1423Julius RojoNo ratings yet
- AnalysisofVehicleSurvivalRatesforMetro ManilaDocument5 pagesAnalysisofVehicleSurvivalRatesforMetro ManilaJulius RojoNo ratings yet
- CalculationsDocument5 pagesCalculationsJulius RojoNo ratings yet
- Simulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemDocument18 pagesSimulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemJulius RojoNo ratings yet
- Suspension For Electrathon VehicleDocument55 pagesSuspension For Electrathon VehicleJulius RojoNo ratings yet
- EPA HQ OAR 2010 0799 0056 - ContentDocument25 pagesEPA HQ OAR 2010 0799 0056 - ContentJulius RojoNo ratings yet
- Tamilnadu Factories Rules-: The Statics and Mobile Pressure Vessels RULES 1981Document13 pagesTamilnadu Factories Rules-: The Statics and Mobile Pressure Vessels RULES 1981Gar PiNo ratings yet
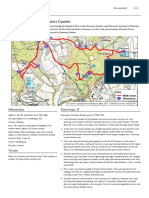
- Weardale Walk From Emmetts Garden WalkingDocument2 pagesWeardale Walk From Emmetts Garden WalkingrayasanderNo ratings yet
- Aircraft Design Project On Bomber AircraDocument59 pagesAircraft Design Project On Bomber AircraHuy Lê HữuNo ratings yet
- Install. Instruc RZ-45 - 75 050822Document29 pagesInstall. Instruc RZ-45 - 75 050822Romas VarnaNo ratings yet
- Boeing's Customer ListDocument20 pagesBoeing's Customer ListMatteo CabarNo ratings yet
- UPRT For Type Rating Course-Addis Ababa WorkshopDocument22 pagesUPRT For Type Rating Course-Addis Ababa WorkshopAbdulmalekNo ratings yet
- 2021 Narciso SampayoDocument13 pages2021 Narciso SampayoMGTSNo ratings yet
- Flying Spur Customer Book ENDocument72 pagesFlying Spur Customer Book ENKostansNo ratings yet
- GBS PDFDocument32 pagesGBS PDFSUNIL100% (1)
- 80 Spin Ace Tier 3 Specifications: Travel DimensionsDocument4 pages80 Spin Ace Tier 3 Specifications: Travel DimensionsBart JohnNo ratings yet
- Overseas Territories Aviation Circular: United Kingdom OTAC 119-10 121-9 125-9 135-9Document25 pagesOverseas Territories Aviation Circular: United Kingdom OTAC 119-10 121-9 125-9 135-9cplowhangNo ratings yet
- CCM - Mobile Equipment Incidents Training, April 2023Document19 pagesCCM - Mobile Equipment Incidents Training, April 2023Paul NthuliNo ratings yet
- Fix Example Kertas OrderDocument1 pageFix Example Kertas OrderAhmad Taufik RosdiNo ratings yet
- 1966 Comet Falcon Fairlane Mustang Manual-751-775Document25 pages1966 Comet Falcon Fairlane Mustang Manual-751-775shitNo ratings yet
- PARTLIST Benelli 150S 150S Key63 d2021 08 10 06 57 34pmDocument78 pagesPARTLIST Benelli 150S 150S Key63 d2021 08 10 06 57 34pmMohamed ali AmeurNo ratings yet
- 24th May Train TicketDocument3 pages24th May Train TicketRahul DeshpandeNo ratings yet
- Asian CatalogueDocument18 pagesAsian CatalogueAvinash GuptaNo ratings yet
- B15S-5 SB1086 E18 PDFDocument412 pagesB15S-5 SB1086 E18 PDFGORDNo ratings yet
- Mazda Owner ManualDocument328 pagesMazda Owner ManualcicosNo ratings yet
- 32 12 16 - Asphalt PavingDocument4 pages32 12 16 - Asphalt PavingSteve LezamaNo ratings yet
- Carraro 20.25Document16 pagesCarraro 20.25johnNo ratings yet
- Danpilot Information Folder 2019Document2 pagesDanpilot Information Folder 2019Anant JoshiNo ratings yet
- LEBZ (Talavera La Real) : General InfoDocument7 pagesLEBZ (Talavera La Real) : General InfoMiguel Angel MartinNo ratings yet
- '10 '11 VN1700 FAF/FBF Title: This Catalog Covers: Grid No. This Grid CoversDocument98 pages'10 '11 VN1700 FAF/FBF Title: This Catalog Covers: Grid No. This Grid CoversDaniel MartínNo ratings yet
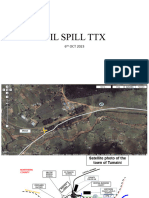
- Oil Spill TTXDocument12 pagesOil Spill TTXgachanja mainaNo ratings yet
- 4.0 Pembangunan Pakej Lawatan Dan Dokumentasi Menggunakan Teknologi IctDocument48 pages4.0 Pembangunan Pakej Lawatan Dan Dokumentasi Menggunakan Teknologi IctnorNo ratings yet
- Aviation PPT 11 07 15Document37 pagesAviation PPT 11 07 15koshy mathewNo ratings yet
- 04 Barriers Parapets RailingsDocument36 pages04 Barriers Parapets RailingsTheDark Lord100% (1)
- MTSERCH V24 G7 - Final Revised ProposalDocument48 pagesMTSERCH V24 G7 - Final Revised ProposalCarlos Johann LuNo ratings yet
- FlangeDocument7 pagesFlangeEdi YantoNo ratings yet