You might also like
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- A Review of Structural and Thermal Analysis of Traction MotorsDocument11 pagesA Review of Structural and Thermal Analysis of Traction MotorsGari PastranaNo ratings yet
- Magneto-Resistive and Spin Valve Heads: Fundamentals and ApplicationsFrom EverandMagneto-Resistive and Spin Valve Heads: Fundamentals and ApplicationsNo ratings yet
- 2.review of Literature and Statement of ProblemDocument6 pages2.review of Literature and Statement of ProblemsheriabhiNo ratings yet
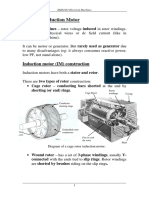
- Chapter 4 - Induction MotorsDocument36 pagesChapter 4 - Induction MotorsYousab Creator100% (1)
- Rarefied Gas DynamicsFrom EverandRarefied Gas DynamicsK KaramchetiRating: 5 out of 5 stars5/5 (1)
- Scramjet: From Wikipedia, The Free EncyclopediaDocument39 pagesScramjet: From Wikipedia, The Free Encyclopediaaeropraveen22No ratings yet
- Rotary Transformer With Ferrite Core For Brushless Excitation of Synchronous MachinesDocument7 pagesRotary Transformer With Ferrite Core For Brushless Excitation of Synchronous MachinesHuong ThaoNo ratings yet
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)From EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)No ratings yet
- Asymptotic Theory of Supersonic Viscous Gas FlowsFrom EverandAsymptotic Theory of Supersonic Viscous Gas FlowsVladimir NeylandNo ratings yet
- Performance Comparisons of Radial and Axial Field Permanent Magnet Brushless MachineDocument8 pagesPerformance Comparisons of Radial and Axial Field Permanent Magnet Brushless Machinerakeshee2007No ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- Applied Superconductivity: Volume IIFrom EverandApplied Superconductivity: Volume IIVernon L. NewhouseNo ratings yet
- Axial PErmanent MAgnetDocument6 pagesAxial PErmanent MAgnetSatyam Swarup100% (1)
- Johnson Motor Product CatalogDocument231 pagesJohnson Motor Product CatalogvalypredicaNo ratings yet
- 19 Induction Motor Fundamentals PDFDocument37 pages19 Induction Motor Fundamentals PDFsuchita jainNo ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- Electric MotorDocument31 pagesElectric Motorstallone21No ratings yet
- Quadcopter Dynamics SimulationDocument24 pagesQuadcopter Dynamics SimulationwelltonarrudaNo ratings yet
- Design of Synchronous MachinesDocument17 pagesDesign of Synchronous MachinesNiteshNarukaNo ratings yet
- BLDC and PMS Motor ComparisonDocument26 pagesBLDC and PMS Motor ComparisonAnimesh MukherjeeNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Traction Motor DesignDocument11 pagesTraction Motor DesignS.m. FerdousNo ratings yet
- Theory of ElectromagneticsDocument3 pagesTheory of ElectromagneticsKrunal FirkeNo ratings yet
- PMSM Control Strategy ComparisonDocument4 pagesPMSM Control Strategy Comparisonpersian67No ratings yet
- IEEE 841: Motor VibrationDocument6 pagesIEEE 841: Motor VibrationMahadi HasanNo ratings yet
- KLS Gogte Institute Course Report on Ultracapacitors in EVsDocument7 pagesKLS Gogte Institute Course Report on Ultracapacitors in EVsShardulNo ratings yet
- Control in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977From EverandControl in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977W. LeonhardNo ratings yet
- Cellular Actuators: Modularity and Variability in Muscle-inspired ActuationFrom EverandCellular Actuators: Modularity and Variability in Muscle-inspired ActuationNo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- Motor Sizing WorksheetDocument5 pagesMotor Sizing Worksheetapi-3835934No ratings yet
- High-efficiency water-cooled axial-flux PM machine for electric vehicle wheel driveDocument7 pagesHigh-efficiency water-cooled axial-flux PM machine for electric vehicle wheel driveSteven SullivanNo ratings yet
- Lynx Vertical Axis Wind TurbineDocument46 pagesLynx Vertical Axis Wind TurbineEric MajaoNo ratings yet
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Cogging TorqueDocument12 pagesCogging Torqueanil_nitkianNo ratings yet
- Power Quality in Power Systems, Electrical Machines, and Power-Electronic DrivesFrom EverandPower Quality in Power Systems, Electrical Machines, and Power-Electronic DrivesNo ratings yet
- Application of Flexible AC Transmission System Devices in Wind Energy Conversion SystemsFrom EverandApplication of Flexible AC Transmission System Devices in Wind Energy Conversion SystemsNo ratings yet
- Wind Energy Generation Modelling and ControlDocument8 pagesWind Energy Generation Modelling and Controljuniorj123No ratings yet
- Methods of Cooling of Electrical MachinesDocument29 pagesMethods of Cooling of Electrical Machinessujith100% (2)
- Wells TurbineDocument13 pagesWells TurbineSriram ChNo ratings yet
- Analysis of Axial Flux MotorDocument4 pagesAnalysis of Axial Flux MotorAvi GuptaNo ratings yet
- Technical Reference: SubjectDocument18 pagesTechnical Reference: SubjectPeter DyckNo ratings yet
- EEE 201 Engineering Mathematics Assoc - Prof. Dr. Ertuğrul AKSOY Cartesian and Cylindrical Coordinate SystemsDocument56 pagesEEE 201 Engineering Mathematics Assoc - Prof. Dr. Ertuğrul AKSOY Cartesian and Cylindrical Coordinate Systems357911No ratings yet
- Process Dynamics Pracs IitrDocument76 pagesProcess Dynamics Pracs IitrSonu KumarNo ratings yet
- B. Pharma Semester IV Pharmaceutics Engineering and Dosage DesignDocument13 pagesB. Pharma Semester IV Pharmaceutics Engineering and Dosage DesignDrAmit VermaNo ratings yet
- 2276 1Document2 pages2276 1hogoyoNo ratings yet
- Gas Sweetening Process Design and CalculationsDocument9 pagesGas Sweetening Process Design and CalculationsFlorin Daniel AnghelNo ratings yet
- Cementitious Underlayment (Maxxon Corp.)Document6 pagesCementitious Underlayment (Maxxon Corp.)Donald EssenNo ratings yet
- Design and Manufacturing of Magnetic Climbing RobotDocument23 pagesDesign and Manufacturing of Magnetic Climbing RobotSushant VanveNo ratings yet
- Ghosh2015 PDFDocument89 pagesGhosh2015 PDFAnonymous rUr4olUNo ratings yet
- GEM Ground Enhancement MaterialDocument2 pagesGEM Ground Enhancement Materialbrayan GcNo ratings yet
- 2.1.2.a Beamdeflection 2Document7 pages2.1.2.a Beamdeflection 2Bailey RodriguezNo ratings yet
- Catalogue Fans DrivesDocument60 pagesCatalogue Fans DrivesFernando MouraNo ratings yet
- Teacher Notes and Answers 7 Circular Motion and GravitationDocument3 pagesTeacher Notes and Answers 7 Circular Motion and GravitationNaaim EyasNo ratings yet
- Science Lesson - Fixed PulleysDocument4 pagesScience Lesson - Fixed Pulleysapi-491433072No ratings yet
- Cours Mansoor YoussefiDocument95 pagesCours Mansoor Youssefiziyad benkhadajNo ratings yet
- Mitchell 1985Document19 pagesMitchell 1985Monal RajNo ratings yet
- Multi SpindleDocument10 pagesMulti Spindlearunurs1No ratings yet
- THE Culture OF Time AND Space: With NEW PrefaceDocument18 pagesTHE Culture OF Time AND Space: With NEW PrefaceGingerAleNo ratings yet
- Problem Solving WorksheetDocument7 pagesProblem Solving WorksheetJSH100No ratings yet
- MS150025 02eDocument187 pagesMS150025 02eDhanraj Patil0% (1)
- P1461 - Conservation of Energy-Maxwell's Wheel 1Document4 pagesP1461 - Conservation of Energy-Maxwell's Wheel 1Vira WulandariNo ratings yet
- Chapter 3 LightSourcesDocument15 pagesChapter 3 LightSourcesfisriiNo ratings yet
- Wind Loading in Tall BuildingsDocument11 pagesWind Loading in Tall Buildingsrenganathank87No ratings yet
- Effect of Misaligned CouplingDocument134 pagesEffect of Misaligned CouplingSivaRSNo ratings yet
- Solar AngelDocument13 pagesSolar Angelaoauaz2000No ratings yet
- Chiller Data SheetDocument4 pagesChiller Data SheetChotiwan Rattanasatien100% (1)
- NUCLEAR BATTERY: A GUIDE TO RADIOISOTOPE POWER SOURCESDocument26 pagesNUCLEAR BATTERY: A GUIDE TO RADIOISOTOPE POWER SOURCESalan100% (1)
- Hdrsr11 SMDocument110 pagesHdrsr11 SMHeiriNo ratings yet
- Types of Computer Monitors ExplainedDocument6 pagesTypes of Computer Monitors ExplainedKhan IhsanNo ratings yet
- Steel in Columns With - Wiggins Method: UpliftDocument6 pagesSteel in Columns With - Wiggins Method: UpliftSube OhNo ratings yet
- Effect of Rubber Tire On Behaviour of Subgrade Expansive Iraqi SoilsDocument14 pagesEffect of Rubber Tire On Behaviour of Subgrade Expansive Iraqi SoilshananNo ratings yet