You might also like
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- 10 InverseKinematics PDFDocument41 pages10 InverseKinematics PDFDũng PhanNo ratings yet
- 10 InverseKinematicsDocument42 pages10 InverseKinematicsAland BravoNo ratings yet
- Introduction To Robotics: TextsDocument17 pagesIntroduction To Robotics: TextsVienNgocQuangNo ratings yet
- Robotics Course: LR02.3:: 3 Dimensional Homogenous TransformationDocument17 pagesRobotics Course: LR02.3:: 3 Dimensional Homogenous TransformationThiha Ye ThwayNo ratings yet
- AAE3004 Lecture 7 - Presentation On 18 Oct 2022Document47 pagesAAE3004 Lecture 7 - Presentation On 18 Oct 2022Myname SmaNo ratings yet
- Direct Kinematics: Robotics 1Document33 pagesDirect Kinematics: Robotics 1Jorge Ballesteros CaceresNo ratings yet
- Differential Kinematics: Robotics 1Document35 pagesDifferential Kinematics: Robotics 1hamza malikNo ratings yet
- Chapter 4 Inverse Manipulator KinematicsDocument128 pagesChapter 4 Inverse Manipulator KinematicsKeith wongNo ratings yet
- Lecture 1Document93 pagesLecture 1ClasesNo ratings yet
- DSP Circular ConvolutionDocument5 pagesDSP Circular ConvolutionAniket KumarNo ratings yet
- QA Basic Calculus Quarter 3 Week 6 FinalDocument7 pagesQA Basic Calculus Quarter 3 Week 6 Finalelyzaventura8No ratings yet
- Unit 2ForwardKinematicsDocument17 pagesUnit 2ForwardKinematicsAadi BhardwajNo ratings yet
- Electronica 2 Aop Non Linear Applications FFRDocument8 pagesElectronica 2 Aop Non Linear Applications FFRYan Luis100% (1)
- Unti-1 - 3 Rigid Motion and Homogenious TransformationsDocument6 pagesUnti-1 - 3 Rigid Motion and Homogenious TransformationsAadi BhardwajNo ratings yet
- Chapter 3 - Laplace TransformDocument57 pagesChapter 3 - Laplace TransformBukhari ManshoorNo ratings yet
- Precept 6Document14 pagesPrecept 6Julia HinesNo ratings yet
- BC q4wk1 2dlp Done Qa RodelDocument16 pagesBC q4wk1 2dlp Done Qa RodelMaynard CorpuzNo ratings yet
- A4_Forced Harmonic OscillatorDocument26 pagesA4_Forced Harmonic Oscillatorf20221184No ratings yet
- PPT 52 - Ex 4 Calculus of Natural LogDocument18 pagesPPT 52 - Ex 4 Calculus of Natural LogRalph Rezin MooreNo ratings yet
- Inverse Manipulator Kinematics: Berke GürDocument22 pagesInverse Manipulator Kinematics: Berke GürOmar Seraj Ed-DeenNo ratings yet
- Course 4 Modeling of Dynamic Systems in FDDocument23 pagesCourse 4 Modeling of Dynamic Systems in FDCend AkhinovNo ratings yet
- Functions Summary Calc 1Document10 pagesFunctions Summary Calc 1eynullabeyliseymurNo ratings yet
- Weak Measurement On Optical Systems: Mid Term Report of BS-MS Project (PH-5101)Document11 pagesWeak Measurement On Optical Systems: Mid Term Report of BS-MS Project (PH-5101)Sayandip DharaNo ratings yet
- Chapter 2 - 2nd Order Linear Differential Equation With Constant Coefficients - Part 2Document21 pagesChapter 2 - 2nd Order Linear Differential Equation With Constant Coefficients - Part 2Bukhari ManshoorNo ratings yet
- ROOT LOCUSDocument11 pagesROOT LOCUSKaushik KhaundNo ratings yet
- Techniques of IntegrationDocument50 pagesTechniques of Integrationhey hey100% (1)
- T8 - Root Locus Technique - 2021Document51 pagesT8 - Root Locus Technique - 2021James ChanNo ratings yet
- Robot Arm KINEMATICs and DynamicsDocument27 pagesRobot Arm KINEMATICs and DynamicsTirth VyasNo ratings yet
- Forward and Inverse Kinematics GuideDocument45 pagesForward and Inverse Kinematics GuideNazlıcan DönmezNo ratings yet
- Pattern Classification 11. Backpropagation & Time-Series ForecastingDocument78 pagesPattern Classification 11. Backpropagation & Time-Series ForecastingMostafa MohamedNo ratings yet
- Statics 2Document5 pagesStatics 2Byron Lorenzo YumolNo ratings yet
- Kinematic Simulation 2Document37 pagesKinematic Simulation 2panave3104No ratings yet
- 6 Root LocusDocument52 pages6 Root LocusDogukan KarabeyinNo ratings yet
- Direct Kinematics: Robotics 1Document31 pagesDirect Kinematics: Robotics 1VictorHernandezNo ratings yet
- Diff. Calc. Module 7 Trigonometric & Inverse FunctionsDocument10 pagesDiff. Calc. Module 7 Trigonometric & Inverse FunctionsFernandez DanielNo ratings yet
- FEA of Beam StructuresDocument38 pagesFEA of Beam StructuresHari Krishna PrasadNo ratings yet
- Trajectory Tracking Control: Robotics 2Document26 pagesTrajectory Tracking Control: Robotics 2zhaodong.liangNo ratings yet
- Mobile Robot Kinematics and Differential Drive ControlDocument21 pagesMobile Robot Kinematics and Differential Drive ControlSon TrinhNo ratings yet
- 10 - Acceleration and Vibration Measurement - SensorsDocument28 pages10 - Acceleration and Vibration Measurement - SensorsKARTHIK S SNo ratings yet
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalNo ratings yet
- Unit-Iii Two Dimensional Scalar Variable ProblemsDocument29 pagesUnit-Iii Two Dimensional Scalar Variable ProblemsFun timeNo ratings yet
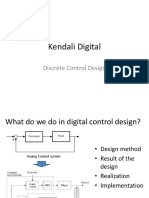
- Kendali Digital-4 - Discrete Control DesignDocument17 pagesKendali Digital-4 - Discrete Control DesignChinta WulandariNo ratings yet
- Inertial Measurement Units II: Gordon Wetzstein! Stanford University!Document37 pagesInertial Measurement Units II: Gordon Wetzstein! Stanford University!mNo ratings yet
- Lecture09 CE72.12Isoparametric FormulationDocument14 pagesLecture09 CE72.12Isoparametric FormulationRahul KasaudhanNo ratings yet
- IK Solves Position, FK Solves AnglesDocument42 pagesIK Solves Position, FK Solves AnglesKshitij PatilNo ratings yet
- NAVIGATION QUIZ SOLUTIONSDocument3 pagesNAVIGATION QUIZ SOLUTIONSJawad AhmedNo ratings yet
- Quiz 6 SolutionsDocument3 pagesQuiz 6 SolutionsMohit GaddeNo ratings yet
- Solutions: Quiz 6: Control of Mobile RobotsDocument3 pagesSolutions: Quiz 6: Control of Mobile RobotsMokhtar AlerteNo ratings yet
- Formula Sheet PostedDocument5 pagesFormula Sheet PostedDiego SantosuossoNo ratings yet
- Exercise - 8 PDFDocument5 pagesExercise - 8 PDFKritiNo ratings yet
- Inverse Kinematics and Workspace of ManipulatorsDocument23 pagesInverse Kinematics and Workspace of ManipulatorsDebabrata PaulNo ratings yet
- ECE-171-SUMMARY-OF-FORMULASDocument2 pagesECE-171-SUMMARY-OF-FORMULASmastershiba93No ratings yet
- Floorplan Design Optimization Using Simulated AnnealingDocument27 pagesFloorplan Design Optimization Using Simulated AnnealingRaviteja NidumukkalaNo ratings yet
- R4-Forward and Inverse KinematicsDocument31 pagesR4-Forward and Inverse Kinematicsahmod202120No ratings yet
- IDEAL GAS PROCESS FORMULASDocument2 pagesIDEAL GAS PROCESS FORMULASbryan amadorNo ratings yet
- 05 LagrangianDynamics 3Document35 pages05 LagrangianDynamics 3Ubedullah SaeedNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Binomial Theorem ExplainedDocument18 pagesBinomial Theorem Explainedparita adhiaNo ratings yet
- Answers To The Plato Practice TestDocument7 pagesAnswers To The Plato Practice TestJacqueline Turcios50% (6)
- Matrix Multiplication in Excel VbaDocument13 pagesMatrix Multiplication in Excel VbaPiya ChowdhuryNo ratings yet
- Statistical Mechanics and Out-of-Equilibrium Systems!Document15 pagesStatistical Mechanics and Out-of-Equilibrium Systems!hrastburg100% (1)
- Ib Maths - GRAPHDocument18 pagesIb Maths - GRAPHTanvi SoniNo ratings yet
- Applications: Functions andDocument350 pagesApplications: Functions andJason UchennnaNo ratings yet
- Unit 5 (Trigonometric Identities)Document34 pagesUnit 5 (Trigonometric Identities)Shaira Mae CajandabNo ratings yet
- Zernike polynomials describe eye aberrationsDocument26 pagesZernike polynomials describe eye aberrationsgastromonoNo ratings yet
- Model Paper-1 18MA11 PDFDocument2 pagesModel Paper-1 18MA11 PDFNilesh shamaNo ratings yet
- Graphical Convolution Example: - Convolve The Following Two FunctionsDocument4 pagesGraphical Convolution Example: - Convolve The Following Two FunctionsSajid Mahmud SejanNo ratings yet
- Elations: ObjectivesDocument12 pagesElations: ObjectivesJhielaMaeMacaraigNo ratings yet
- Path IntegralDocument32 pagesPath IntegralviskaNo ratings yet
- Grade 8 Mathematics Test Examples (NY)Document15 pagesGrade 8 Mathematics Test Examples (NY)yyanan1118No ratings yet
- Test Bank For Discrete Mathematics With Applications 5th Edition Susanna S EppDocument5 pagesTest Bank For Discrete Mathematics With Applications 5th Edition Susanna S EppCecil Johnson100% (29)
- Copula RegressionDocument26 pagesCopula RegressionDanna Lesley Cruz ReyesNo ratings yet
- Boundary Element Methods - An OverviewDocument24 pagesBoundary Element Methods - An OverviewdeviantenatorNo ratings yet
- FIR Filter Design by WindowingDocument6 pagesFIR Filter Design by Windowingshabbir470No ratings yet
- Controller DesignDocument253 pagesController DesignymvbnNo ratings yet
- Y12 FM AS Pure Stationary Points Problem Solving Follow Up WorkDocument10 pagesY12 FM AS Pure Stationary Points Problem Solving Follow Up WorkSrikaushik TumulaNo ratings yet
- Math 10 Lesson Plan on Sequences and SeriesDocument10 pagesMath 10 Lesson Plan on Sequences and SeriesChristian Mark Almagro AyalaNo ratings yet
- 5 The Ring of Real QuaternionsDocument4 pages5 The Ring of Real Quaternionsritik dwivediNo ratings yet
- Mechanical and Metal Trades Handbook 378 enDocument1 pageMechanical and Metal Trades Handbook 378 enTrevor SalazarNo ratings yet
- REAL NUMBERS (Rational and Irrational)Document40 pagesREAL NUMBERS (Rational and Irrational)Hendrik StanleyNo ratings yet
- 2 Thermal Analysis: UDEC Allows Simulation of Transient Heat Conduction in Materials and The Development of ThermallyDocument60 pages2 Thermal Analysis: UDEC Allows Simulation of Transient Heat Conduction in Materials and The Development of ThermallyRakshit MishraNo ratings yet
- Lecture No Two Banach Algebra, Notations and Basic DefinitionsDocument8 pagesLecture No Two Banach Algebra, Notations and Basic DefinitionsSeif RadwanNo ratings yet
- FLUENT Modeling Unsteady FlowsDocument101 pagesFLUENT Modeling Unsteady Flows조기현100% (1)
- FFT and IFFT of Square WaveformDocument5 pagesFFT and IFFT of Square WaveformMohsin IqbalNo ratings yet
- Asymptotic NotationsDocument8 pagesAsymptotic Notationshyrax123No ratings yet
- Day 1 Notes - 6.9 Notes - Logs With Other Bases-KeyedDocument2 pagesDay 1 Notes - 6.9 Notes - Logs With Other Bases-Keyedmika piusNo ratings yet
- As M Gold P1 A PDFDocument35 pagesAs M Gold P1 A PDFnewaznahianNo ratings yet