You might also like
- Hira Gaurd HouseDocument14 pagesHira Gaurd HouseNagadevan GovindanNo ratings yet
- SM 6Document116 pagesSM 6陳偉泓No ratings yet
- Comey Memo To FBI EmployeesDocument2 pagesComey Memo To FBI EmployeesLaw&Crime100% (2)
- Flight Eticket - PdfaaaDocument3 pagesFlight Eticket - PdfaaaIgnacio Gonzalez PastranoNo ratings yet
- TD 3.6 L4 TCD 3.6 L4: Operation ManualDocument72 pagesTD 3.6 L4 TCD 3.6 L4: Operation ManualMajd50% (2)
- Basics of Robotics - CurriculumDocument9 pagesBasics of Robotics - CurriculumNikhil SatputeNo ratings yet
- Final Project Report - Fanuc LR Mate 200cDocument12 pagesFinal Project Report - Fanuc LR Mate 200cMariane Carvalho100% (3)
- Robotic Arm Dynamic and Simulation With Virtual Re PDFDocument7 pagesRobotic Arm Dynamic and Simulation With Virtual Re PDFALA SOUISSINo ratings yet
- Module 1 Unit 2 - Hardware and Software MGT PDFDocument7 pagesModule 1 Unit 2 - Hardware and Software MGT PDFRose Bella Tabora LacanilaoNo ratings yet
- Newtom 3G ManualDocument154 pagesNewtom 3G ManualJorge JuniorNo ratings yet
- Case Study-Hain Celestial: Student Name Institution Affiliation DateDocument5 pagesCase Study-Hain Celestial: Student Name Institution Affiliation DategeofreyNo ratings yet
- Part B Robotic Experiment 2020Document3 pagesPart B Robotic Experiment 2020TuanHungNo ratings yet
- Lecture 14-SIM-2021Document5 pagesLecture 14-SIM-2021Ali QahtanNo ratings yet
- A Mid Sem Report ON Modelling and Analysis of Tal Brabo Manipulator Using V-RepDocument22 pagesA Mid Sem Report ON Modelling and Analysis of Tal Brabo Manipulator Using V-RepAshish Joseph MathewNo ratings yet
- A Fully Autonomous Indoor Mobile Robot Using SLAM: June 2010Document7 pagesA Fully Autonomous Indoor Mobile Robot Using SLAM: June 2010huseyn haydarovNo ratings yet
- Stock Price Trend Forecasting Using Supervised Learning MethodsDocument2 pagesStock Price Trend Forecasting Using Supervised Learning MethodsPRAFULKUMAR PARMARNo ratings yet
- ReportDocument2 pagesReportAliNo ratings yet
- M6SP 20 2Document23 pagesM6SP 20 2Black RipperNo ratings yet
- Dewi Nasien - Development of Robot Simulation Software For Five Joints Mitsubishi RV-2AJ Robot Using MATLABSimulink and V-Realm Builder - 2008 PDFDocument5 pagesDewi Nasien - Development of Robot Simulation Software For Five Joints Mitsubishi RV-2AJ Robot Using MATLABSimulink and V-Realm Builder - 2008 PDFDrDewi NasNo ratings yet
- A Guided Internship For High School Students Using Irobot Create ?Document6 pagesA Guided Internship For High School Students Using Irobot Create ?abdul_348No ratings yet
- Lab Assignment 1 - Dual Cobot Assembly TaskDocument4 pagesLab Assignment 1 - Dual Cobot Assembly TaskNg ChrisNo ratings yet
- EL-422 Robotics (Revised-2022)Document106 pagesEL-422 Robotics (Revised-2022)Yusra KhanNo ratings yet
- Modeling in ADAMS of A 6R Industrial RobotDocument5 pagesModeling in ADAMS of A 6R Industrial RobotvxefjrqlanqxfimargNo ratings yet
- Pyrep: Bringing V-Rep To Deep Robot LearningDocument4 pagesPyrep: Bringing V-Rep To Deep Robot LearningMarks Calderon NiquinNo ratings yet
- Lab ManualDocument18 pagesLab Manualnijanthan.roboticsNo ratings yet
- Studentresources syllabi-ME 192 F18Document6 pagesStudentresources syllabi-ME 192 F18pasinduNo ratings yet
- Proceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGDocument7 pagesProceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGIbrahim SadohNo ratings yet
- Batch 13Document43 pagesBatch 13Abhishek Kumar SinghNo ratings yet
- Spider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisDocument6 pagesSpider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisLuis RuizNo ratings yet
- Irjet V6i31240Document7 pagesIrjet V6i31240Ghanvir SinghNo ratings yet
- Remote Controlled Robot Arm: January 2004Document7 pagesRemote Controlled Robot Arm: January 2004manjuNo ratings yet
- Remote Controlled Robot Arm: January 2004Document7 pagesRemote Controlled Robot Arm: January 2004manjuNo ratings yet
- Simulation of Pick and Place Robotics System Using Solidworks SoftmotionDocument7 pagesSimulation of Pick and Place Robotics System Using Solidworks SoftmotionSaumya SaxenaNo ratings yet
- +merge RemainingDocument17 pages+merge RemainingVISHALNo ratings yet
- Live Motion Capture Software: Osama Mohammad Abdul FattahDocument2 pagesLive Motion Capture Software: Osama Mohammad Abdul FattahOsama FattahNo ratings yet
- Modeling A Deburring Process, Using DELMIA V5: January 2010Document14 pagesModeling A Deburring Process, Using DELMIA V5: January 2010Carlos Henrique NascimentoNo ratings yet
- RoboticsDocument3 pagesRoboticsRishabh ShahNo ratings yet
- Teaching With RoboCupDocument6 pagesTeaching With RoboCupTan Tien NguyenNo ratings yet
- Metrology-Integrated Industrial Robots - Calibration, Implementation and TestingDocument6 pagesMetrology-Integrated Industrial Robots - Calibration, Implementation and TestingBiris GabrielNo ratings yet
- Path Planning of Mobile Agents Using Ai TechniqueDocument64 pagesPath Planning of Mobile Agents Using Ai TechniqueGautam RaminiNo ratings yet
- Sharif College of Engineeng & Technology: Submitted byDocument4 pagesSharif College of Engineeng & Technology: Submitted byAnonymous zFqvalO4No ratings yet
- Ib 2014 1106958 1Document112 pagesIb 2014 1106958 1Sai Kyaw HtikeNo ratings yet
- Modeling, Control, and Simulation of A SCARA PRR-type Robot ManipulatorDocument11 pagesModeling, Control, and Simulation of A SCARA PRR-type Robot ManipulatorXuân BảoNo ratings yet
- PCB DrillingDocument7 pagesPCB Drillingalfonso alvarez garmaNo ratings yet
- Finite Element Based Analysis of Rotating Robot PedestalDocument5 pagesFinite Element Based Analysis of Rotating Robot PedestalAnonymous kw8Yrp0R5rNo ratings yet
- A Proposal For RF Controlled Robot: DRUSE-TH01-120Document2 pagesA Proposal For RF Controlled Robot: DRUSE-TH01-120Dikshant YadavNo ratings yet
- Sanskar Salian - Mechatronics Review PaperDocument6 pagesSanskar Salian - Mechatronics Review PaperNiket NardiaNo ratings yet
- Dynamic Modelling and Simulation of A Three-Wheeled Omnidirectional Mobile Robot: Bond Graph ApproachDocument6 pagesDynamic Modelling and Simulation of A Three-Wheeled Omnidirectional Mobile Robot: Bond Graph ApproachAang junaidiNo ratings yet
- Anthropomorphic Robotic Arms - Practice and SimulationDocument5 pagesAnthropomorphic Robotic Arms - Practice and SimulationbugraerginNo ratings yet
- 1 PBDocument7 pages1 PBFyndi Aw AwNo ratings yet
- 1 s2.0 S1877050918310548 MainDocument8 pages1 s2.0 S1877050918310548 MainAnonymous 9q5GEfm8INo ratings yet
- Literature Review of Pick and Place RobotDocument4 pagesLiterature Review of Pick and Place Robotgvzf446w100% (1)
- Report of Research Work at IECDocument4 pagesReport of Research Work at IECDHIRENDRA KUMAR SINGHNo ratings yet
- Robotics HW1Document17 pagesRobotics HW1이주순No ratings yet
- MDPN423 Robotics Engineering Mahmoud Sayed Zaghlool 1135487Document11 pagesMDPN423 Robotics Engineering Mahmoud Sayed Zaghlool 1135487Mahmoud Sayed ZaghloolNo ratings yet
- Design and Development of Weldinng RobotDocument13 pagesDesign and Development of Weldinng RobotÊswâr SîñghNo ratings yet
- Basic Simulation Laboratory Manual B.Tech (Ii Year - I Sem) (2021-22)Document56 pagesBasic Simulation Laboratory Manual B.Tech (Ii Year - I Sem) (2021-22)PavaniNo ratings yet
- Design and Analysis of The Spray-Painting Robot FoDocument11 pagesDesign and Analysis of The Spray-Painting Robot FoMuhammad SulemanNo ratings yet
- Small Animation Using Applet (JAVA)Document13 pagesSmall Animation Using Applet (JAVA)shaikhnumn22No ratings yet
- Development of Low Grade Robotic Arm For Small IndustriesDocument12 pagesDevelopment of Low Grade Robotic Arm For Small IndustriesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Workspace Analysis and The Effect of Geometric ParDocument11 pagesWorkspace Analysis and The Effect of Geometric Parhang sangNo ratings yet
- MQP RoboDog Final ReportDocument64 pagesMQP RoboDog Final ReportThink DiagNo ratings yet
- Industrial Robotics: PáginaDocument7 pagesIndustrial Robotics: PáginaMarco Ja PaezNo ratings yet
- A Review of Physics Simulators For Robotic ApplicationsDocument16 pagesA Review of Physics Simulators For Robotic ApplicationsHarshil NaikNo ratings yet
- A Tutorial On Visual Servo ControlDocument20 pagesA Tutorial On Visual Servo ControlAlberto NicolottiNo ratings yet
- Gesture Control of Robotic Arm: Institute of Research AdvancesDocument9 pagesGesture Control of Robotic Arm: Institute of Research AdvancesaarthiNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Bijay KumarNo ratings yet
- ELEKTOR19740Document8 pagesELEKTOR19740abdul shaggyNo ratings yet
- New Doc 04-19-2022 01.02Document24 pagesNew Doc 04-19-2022 01.02abdul shaggyNo ratings yet
- Islamiyat B.SDocument45 pagesIslamiyat B.Sabdul shaggyNo ratings yet
- Technical Writing: Project ReportDocument55 pagesTechnical Writing: Project Reportabdul shaggyNo ratings yet
- Research Statement - 0Document2 pagesResearch Statement - 0abdul shaggyNo ratings yet
- Conference 101719Document3 pagesConference 101719jorgeNo ratings yet
- CS Assignment 1Document4 pagesCS Assignment 1abdul shaggyNo ratings yet
- D1-12 - PCM DecodingDocument12 pagesD1-12 - PCM Decodingabdul shaggyNo ratings yet
- 3 Phase Asyn. MachineDocument74 pages3 Phase Asyn. Machineabdul shaggyNo ratings yet
- Transformer PDFDocument70 pagesTransformer PDFumair rashidNo ratings yet
- Ie CepDocument11 pagesIe Cepabdul shaggyNo ratings yet
- CamScanner 04-15-2022 10.34Document1 pageCamScanner 04-15-2022 10.34abdul shaggyNo ratings yet
- ReportDocument12 pagesReportabdul shaggyNo ratings yet
- New Doc 12-18-2022 16.11 PDFDocument5 pagesNew Doc 12-18-2022 16.11 PDFabdul shaggyNo ratings yet
- Assigment 02Document2 pagesAssigment 02abdul shaggyNo ratings yet
- Mpi Lab1Document6 pagesMpi Lab1abdul shaggyNo ratings yet
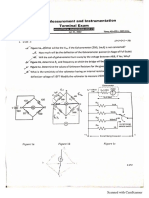
- M&I Past PapersDocument11 pagesM&I Past Papersabdul shaggyNo ratings yet
- IE Assignment 3Document14 pagesIE Assignment 3abdul shaggyNo ratings yet
- Assignment 3Document1 pageAssignment 3abdul shaggyNo ratings yet
- Sendik's Oconomowoc Press AnnouncementDocument2 pagesSendik's Oconomowoc Press AnnouncementTMJ4 NewsNo ratings yet
- ZF SI 6hp Family Tree enDocument2 pagesZF SI 6hp Family Tree enfercho573No ratings yet
- Truman Show EssayDocument3 pagesTruman Show EssayJess FongNo ratings yet
- 12 Things You Must Know To Win A Full Scholarship in SwedenDocument51 pages12 Things You Must Know To Win A Full Scholarship in SwedenEmmanuel GeraldNo ratings yet
- Jungle Safari Booking Management System: Mini Project ReportDocument19 pagesJungle Safari Booking Management System: Mini Project ReportNIRAV SHAH100% (1)
- Course Syllabus: ACCT-350 Accounting Information SystemsDocument1 pageCourse Syllabus: ACCT-350 Accounting Information SystemsJo HarahNo ratings yet
- CIMB-Financial Statement 2014 PDFDocument413 pagesCIMB-Financial Statement 2014 PDFEsplanadeNo ratings yet
- Practice Questions SheetDocument4 pagesPractice Questions Sheetsaif hasanNo ratings yet
- Masonry: Department of EducationDocument6 pagesMasonry: Department of EducationFatima AdilNo ratings yet
- (Your Business Name Here) - Safe Work Procedure Metal LatheDocument1 page(Your Business Name Here) - Safe Work Procedure Metal LatheSafety DeptNo ratings yet
- Promax Reference PDFDocument32 pagesPromax Reference PDFfarkli88No ratings yet
- Kendra Penningroth 8-08Document2 pagesKendra Penningroth 8-08api-355965189No ratings yet
- Automotive Workshop Practice 1 Report - AlignmentDocument8 pagesAutomotive Workshop Practice 1 Report - AlignmentIhsan Yusoff Ihsan0% (1)
- Liebert Exs 10 20 Kva Brochure EnglishDocument8 pagesLiebert Exs 10 20 Kva Brochure Englishenrique espichan coteraNo ratings yet
- Metrobank (Strengths)Document6 pagesMetrobank (Strengths)Hera IgnatiusNo ratings yet
- PAL-AT Operating ManualDocument60 pagesPAL-AT Operating ManualArmağan DemirelNo ratings yet
- DWC Ordering InformationDocument15 pagesDWC Ordering InformationbalaNo ratings yet
- American Bar Association American Bar Association JournalDocument6 pagesAmerican Bar Association American Bar Association JournalKarishma RajputNo ratings yet
- Request For Refund or Test Date Transfer FormDocument2 pagesRequest For Refund or Test Date Transfer FormAhmed Hamdy100% (1)
- Purposeful InnovationDocument6 pagesPurposeful InnovationKeith Tanaka MagakaNo ratings yet
- FBS Ii enDocument10 pagesFBS Ii enunsalNo ratings yet