You might also like
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- 5b8e7fecb6f03bs Lab MANUAL FINALDocument182 pages5b8e7fecb6f03bs Lab MANUAL FINALswetha bollamNo ratings yet
- Basic Matrix Operations in MATLABDocument132 pagesBasic Matrix Operations in MATLABMohdShahidNo ratings yet
- Basic Simulation: Laboratory ManualDocument23 pagesBasic Simulation: Laboratory ManualranjithNo ratings yet
- Pathways to Machine Learning and Soft Computing: 邁向機器學習與軟計算之路(國際英文版)From EverandPathways to Machine Learning and Soft Computing: 邁向機器學習與軟計算之路(國際英文版)No ratings yet
- II.b.tech-i-sem Bs Lab MDocument190 pagesII.b.tech-i-sem Bs Lab Mshylu ShynyNo ratings yet
- DSP 15scheme Lab Manual PDFDocument63 pagesDSP 15scheme Lab Manual PDFShare The ExperienceNo ratings yet
- SAS Lab Manual For 17-18Document76 pagesSAS Lab Manual For 17-18Amir QureshiNo ratings yet
- DSP Lab Manual 2022 23Document108 pagesDSP Lab Manual 2022 23sagar kothawarNo ratings yet
- Bs Lab ManualDocument116 pagesBs Lab Manualjaswanthj100% (1)
- DSP Vtu Lab ManualDocument137 pagesDSP Vtu Lab Manualvivek jNo ratings yet
- Digital Signal Processing Laboratory Manual 10ECL57 PDFDocument137 pagesDigital Signal Processing Laboratory Manual 10ECL57 PDFvivek jNo ratings yet
- DSP Lab - 15ecl57 Manual: Bms Institute of Technology& ManagementDocument110 pagesDSP Lab - 15ecl57 Manual: Bms Institute of Technology& Managementsethu ramanNo ratings yet
- Lab ManualDocument53 pagesLab ManualMuhammad IsmailNo ratings yet
- Communication SystemDocument63 pagesCommunication SystemAthar BaigNo ratings yet
- Digital Signal Processing: Laboratory ManualDocument101 pagesDigital Signal Processing: Laboratory ManualGopinath B L NaiduNo ratings yet
- Lab ManualDocument112 pagesLab ManualSivagami ManiNo ratings yet
- CSE Lab Manual Final 2019-20 P-IDocument42 pagesCSE Lab Manual Final 2019-20 P-IJerry boyNo ratings yet
- Control System Lab ManualDocument55 pagesControl System Lab Manual9351399193inNo ratings yet
- BS Lab 2021-22Document71 pagesBS Lab 2021-22jale charitha reddyNo ratings yet
- Lab 1Document17 pagesLab 1215231No ratings yet
- Matrix Operations in ScilabDocument31 pagesMatrix Operations in ScilabRama SugavanamNo ratings yet
- Lab 8 9Document9 pagesLab 8 9Muhammad ShoaibNo ratings yet
- Signals and Systems Lab ManualDocument52 pagesSignals and Systems Lab ManualChandu mettelaNo ratings yet
- DSP Lab Manual PallaviDocument67 pagesDSP Lab Manual Pallavib vamshi100% (1)
- Lab Manual (PROGRAMMING!!)Document57 pagesLab Manual (PROGRAMMING!!)Zulfiqar MemonNo ratings yet
- Department: Lab ManualDocument36 pagesDepartment: Lab ManualPragun SinghalNo ratings yet
- Basic Simulation LabDocument69 pagesBasic Simulation LabkamalahasanmNo ratings yet
- DSP Lab Manual 2020Document126 pagesDSP Lab Manual 2020Vinay ChinnaaNo ratings yet
- Ade Lab ManualDocument47 pagesAde Lab ManualSANIYYA AAFREENNo ratings yet
- DSP LAB MANUAL 2017 ODD RMK PDFDocument144 pagesDSP LAB MANUAL 2017 ODD RMK PDFRajee100% (2)
- Signals and Systems Lab ManualDocument63 pagesSignals and Systems Lab ManualDeepak SinghNo ratings yet
- Laboratory Manual: Power System Analysis-Ii (18EE72)Document84 pagesLaboratory Manual: Power System Analysis-Ii (18EE72)Saumya SinghNo ratings yet
- Control System & Fuzzy Logic - Lab Manual - 23 - 24Document55 pagesControl System & Fuzzy Logic - Lab Manual - 23 - 24abhisheknalawade2004No ratings yet
- Control Systems Lab: Laboratory and Experiment GuideDocument29 pagesControl Systems Lab: Laboratory and Experiment GuidehimanshuNo ratings yet
- Signal and Systems Lab Manual PDFDocument78 pagesSignal and Systems Lab Manual PDFMuhammad SaadNo ratings yet
- DSPecelabmanualDocument108 pagesDSPecelabmanualmailmeasddNo ratings yet
- Studentresources syllabi-ME 192 F18Document6 pagesStudentresources syllabi-ME 192 F18pasinduNo ratings yet
- Jaypee University of Information Technology WAKNAGHAT, DISTT. SOLAN (H.P.) - 173215Document4 pagesJaypee University of Information Technology WAKNAGHAT, DISTT. SOLAN (H.P.) - 173215Shivam MauryaNo ratings yet
- ELE 3212 - SS LabDocument49 pagesELE 3212 - SS LabsheetalprachandraNo ratings yet
- Simulation Lab Manual 3107Document30 pagesSimulation Lab Manual 3107rajee101No ratings yet
- Lab 14Document7 pagesLab 14Muhammd hussain khanNo ratings yet
- SS Lab ManualDocument48 pagesSS Lab ManualKannan RNo ratings yet
- EE-232 Lab Manual Signals and SystemsDocument57 pagesEE-232 Lab Manual Signals and SystemsMuhammad YousafNo ratings yet
- Electrical Ciruits & Simulation LabDocument86 pagesElectrical Ciruits & Simulation Labafshan ishaqNo ratings yet
- EL-315 Signals - Systems Lab ManualDocument145 pagesEL-315 Signals - Systems Lab ManualAL Rizwan AsifNo ratings yet
- Signals and Systems Lab 08 PDFDocument9 pagesSignals and Systems Lab 08 PDFhamzaNo ratings yet
- Control FileDocument18 pagesControl FileOm Prakash GadgeNo ratings yet
- Control System Lab ManualDocument72 pagesControl System Lab ManualvikaskumarNo ratings yet
- DSP Lab ManualDocument34 pagesDSP Lab ManualDeeksha SinghNo ratings yet
- University of Management and Technology: Signals and Systems Lab Manual Signals and Systems Lab Manual EL-315Document145 pagesUniversity of Management and Technology: Signals and Systems Lab Manual Signals and Systems Lab Manual EL-315ziafat shehzadNo ratings yet
- Global Institute of Engineering and TechnologyDocument13 pagesGlobal Institute of Engineering and TechnologyMeer Mustafa AliNo ratings yet
- BS Lab Manual R18 PDFDocument113 pagesBS Lab Manual R18 PDFKamarthi VanithaNo ratings yet
- Fall2022 Project Lab 11 12Document5 pagesFall2022 Project Lab 11 12Dimitrios MastrogiannisNo ratings yet
- Laboratory Manual: PC-BTE506 - Control System LaboratoryDocument44 pagesLaboratory Manual: PC-BTE506 - Control System LaboratoryVedant .ChavanNo ratings yet
- Basic Simulation Lab: Course OutcomesDocument1 pageBasic Simulation Lab: Course Outcomesbharathec605No ratings yet
- UntitledDocument4 pagesUntitledAB 26No ratings yet
- Basic Simulation LAB ManualDocument90 pagesBasic Simulation LAB ManualHemant RajakNo ratings yet
- 286 293, Tesma409, IJEASTDocument8 pages286 293, Tesma409, IJEASTPavaniNo ratings yet
- FES Lab Experiment NumberDocument2 pagesFES Lab Experiment NumberPavaniNo ratings yet
- YELLOW SHEETSDocument10 pagesYELLOW SHEETSPavaniNo ratings yet
- R1622031042019Document8 pagesR1622031042019PavaniNo ratings yet
- Unit 1Document24 pagesUnit 1PavaniNo ratings yet
- ManuscriptDocument3 pagesManuscriptPavaniNo ratings yet
- DMM - 2 R16 - Unit-2Document32 pagesDMM - 2 R16 - Unit-2PavaniNo ratings yet
- DMM - 2 R16 - Unit-3Document16 pagesDMM - 2 R16 - Unit-3PavaniNo ratings yet
- B.tech Mech IV-II Time Table r19Document5 pagesB.tech Mech IV-II Time Table r19PavaniNo ratings yet
- CATIA Lab ManualDocument79 pagesCATIA Lab ManualPavaniNo ratings yet
- DMM - 2 R16 - Unit-6Document22 pagesDMM - 2 R16 - Unit-6PavaniNo ratings yet
- Unit - 1Document59 pagesUnit - 1PavaniNo ratings yet
- Mech Engg 3-1 CS & Syllabus - UG - R20Document102 pagesMech Engg 3-1 CS & Syllabus - UG - R20PavaniNo ratings yet
- DMM - 2 R19 - UNIT-4 (Ref-2)Document39 pagesDMM - 2 R19 - UNIT-4 (Ref-2)PavaniNo ratings yet
- 3d Printed Prosthetic HandDocument70 pages3d Printed Prosthetic HandDavid CorpadeanNo ratings yet
- St.Theressa AM Mid-Exam QuestionsDocument2 pagesSt.Theressa AM Mid-Exam QuestionsPavaniNo ratings yet
- 3D PrintingDocument14 pages3D PrintingDorian VujnovićNo ratings yet
- CamScanner App Scans Documents EasilyDocument2 pagesCamScanner App Scans Documents EasilyPavaniNo ratings yet
- Structural and Thermal Analysis of Disc Brake Using Solidworks and AnsysDocument11 pagesStructural and Thermal Analysis of Disc Brake Using Solidworks and AnsysIAEME PublicationNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument21 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistsmohmmad mahmoodNo ratings yet
- JNTUK ME SyllabusDocument9 pagesJNTUK ME Syllabusg rajuNo ratings yet
- EV Single Page Brochure1Document29 pagesEV Single Page Brochure1PavaniNo ratings yet
- c20 Dme Printby Sbtet 27092021Document465 pagesc20 Dme Printby Sbtet 27092021PavaniNo ratings yet
- Design, Development and Construction of A Fuel Cell Vehicle-Hercules ProjectDocument14 pagesDesign, Development and Construction of A Fuel Cell Vehicle-Hercules ProjectPavaniNo ratings yet
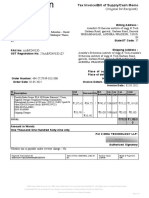
- Tax Invoice for 3D Printer StickerDocument1 pageTax Invoice for 3D Printer StickerPavaniNo ratings yet
- Dme Mid1 Question PaperDocument2 pagesDme Mid1 Question PaperPavaniNo ratings yet
- Design and Fabrication of 3-Axes Mini CNC Milling MachineDocument15 pagesDesign and Fabrication of 3-Axes Mini CNC Milling MachinePavaniNo ratings yet
- (Original For Recipient) : Sl. No Description Unit Price Discount Qty Net Amount Tax Rate Tax Type Tax Amount Total AmountDocument1 page(Original For Recipient) : Sl. No Description Unit Price Discount Qty Net Amount Tax Rate Tax Type Tax Amount Total AmountPavaniNo ratings yet
- Casting and Welding GuideDocument27 pagesCasting and Welding GuidePavaniNo ratings yet
- Modeling and Simulation of Mechatronic Systems Using SimscapeDocument42 pagesModeling and Simulation of Mechatronic Systems Using SimscapePavaniNo ratings yet
- GRE Math Practice Test 17Document22 pagesGRE Math Practice Test 17Malik Shahzad100% (2)
- Court Evidence For AcitcratnaDocument7 pagesCourt Evidence For AcitcratnakaeppelinfNo ratings yet
- CXW01 - Campus Switching Fundamentals - Lab GuideDocument19 pagesCXW01 - Campus Switching Fundamentals - Lab Guidetest testNo ratings yet
- Understanding Pandas Groupby For Data AggregationDocument49 pagesUnderstanding Pandas Groupby For Data AggregationJustin RobinsonNo ratings yet
- ComptiaDocument90 pagesComptiakvsrvzmNo ratings yet
- Object Relational Interactions With OracleDocument16 pagesObject Relational Interactions With OraclefacultyniitNo ratings yet
- Curs MicrosoftDocument695 pagesCurs MicrosoftBaloi-Mitrica DanielNo ratings yet
- 1 Progress Report: Aroosha Pervaiz DCIS, PIEAS Nilore, PakistanDocument1 page1 Progress Report: Aroosha Pervaiz DCIS, PIEAS Nilore, PakistanNo oneNo ratings yet
- Emerging Technologies: An SEO-Optimized GuideDocument22 pagesEmerging Technologies: An SEO-Optimized GuideES BirnurNo ratings yet
- Devops Master Program Syllabus: Mithun Software Solutions BangaloreDocument12 pagesDevops Master Program Syllabus: Mithun Software Solutions BangaloreRamakant SinghNo ratings yet
- BlueStacks App PlayerDocument3 pagesBlueStacks App PlayerZagor2012No ratings yet
- 9399PLC5UMDocument542 pages9399PLC5UMneoflashNo ratings yet
- Handfree Driving For Automobile Full Seminar Report 3456Document6 pagesHandfree Driving For Automobile Full Seminar Report 3456ankitsingh_yadav704No ratings yet
- Compiler Design SolutionsDocument5 pagesCompiler Design SolutionsNiravNo ratings yet
- Az-220 Dumps Microsoft Azure Iot Developer: 100% Valid and Newest Version Az-220 Questions & Answers Shared by CertleaderDocument13 pagesAz-220 Dumps Microsoft Azure Iot Developer: 100% Valid and Newest Version Az-220 Questions & Answers Shared by CertleaderIamSajid Jatoi0% (1)
- Geo5 Rock StabilityDocument8 pagesGeo5 Rock StabilityAlwin Raymond SolemanNo ratings yet
- Word 2021 Advanced Quick ReferenceDocument3 pagesWord 2021 Advanced Quick ReferenceDavinia LajayNo ratings yet
- Guideline-For-Regular (Summer) Exam 2021 B. PharmacyDocument1 pageGuideline-For-Regular (Summer) Exam 2021 B. PharmacyBHRUJ PATELNo ratings yet
- Azure Account & Subscriptions - Direct DevOps From Quality ThoughtDocument2 pagesAzure Account & Subscriptions - Direct DevOps From Quality ThoughtDigambar S TatkareNo ratings yet
- Components of The System UnitDocument33 pagesComponents of The System Unitapi-304500968No ratings yet
- EE311 Lecture OneDocument18 pagesEE311 Lecture OneĤmăđę HmNo ratings yet
- EPFO - Collect Online Claim ReceiptDocument2 pagesEPFO - Collect Online Claim ReceiptAJAY KUMAR26100% (1)
- Systems Development: Mcgraw-Hill/Irwin © 2008 The Mcgraw-Hill Companies, All Rights ReservedDocument30 pagesSystems Development: Mcgraw-Hill/Irwin © 2008 The Mcgraw-Hill Companies, All Rights Reservedpalashkhare11No ratings yet
- Logit and Probit Cheat SheetDocument2 pagesLogit and Probit Cheat SheethohonotNo ratings yet
- Web Technology Paper MidsDocument5 pagesWeb Technology Paper MidsAbdullah Bin Rauf100% (1)
- 02 Secnarios 12c PDFDocument10 pages02 Secnarios 12c PDFHari PrasathNo ratings yet
- EchoscanDocument4 pagesEchoscanWijdan MufizNo ratings yet
- EC3120 Mathematical EconomicsDocument2 pagesEC3120 Mathematical Economicsmrudder1999No ratings yet
- Tor Project: BridgesDocument3 pagesTor Project: Bridgesmilthon_carlosNo ratings yet
- Tcs Programming Questions - Tcs Programming McqsDocument18 pagesTcs Programming Questions - Tcs Programming McqsKiran maruNo ratings yet