You might also like
- What's Cooking: Digital Transformation of the Agrifood SystemFrom EverandWhat's Cooking: Digital Transformation of the Agrifood SystemNo ratings yet
- Cost Estimating Manual for Pipelines and Marine Structures: New Printing 1999From EverandCost Estimating Manual for Pipelines and Marine Structures: New Printing 1999Rating: 5 out of 5 stars5/5 (2)
- Survey of Algorithms For The Convex Hull ProblemDocument20 pagesSurvey of Algorithms For The Convex Hull ProblemKasun Ranga WijeweeraNo ratings yet
- Quantum Transport: Summer Semester 2017Document35 pagesQuantum Transport: Summer Semester 2017Satkas DimitriosNo ratings yet
- MOSFET: Introduction: E&CE 437 Integrated VLSI SystemsDocument15 pagesMOSFET: Introduction: E&CE 437 Integrated VLSI SystemsPrashanth HamilpurNo ratings yet
- 1 Applications of Nearest NeighborDocument5 pages1 Applications of Nearest NeighboriimranmalikNo ratings yet
- Assignment QuantizationDocument2 pagesAssignment QuantizationArunabh GhoshNo ratings yet
- Massachusetts Institute of TechnologyDocument12 pagesMassachusetts Institute of TechnologytayeNo ratings yet
- Module FEM-earthquake - Theoretical GroundsDocument22 pagesModule FEM-earthquake - Theoretical GroundsnishantNo ratings yet
- Perfect Codes in GeneralizedDocument41 pagesPerfect Codes in GeneralizedJayagopal Research GroupNo ratings yet
- Theories and Finite Elements For Multilayered, Anisotropic, Composite Plates and ShellsDocument54 pagesTheories and Finite Elements For Multilayered, Anisotropic, Composite Plates and ShellsficuniNo ratings yet
- Chap 19Document6 pagesChap 19apratim.chatterjiNo ratings yet
- 13.1 Young's Double Slit Experiment.: ScreenDocument7 pages13.1 Young's Double Slit Experiment.: ScreenAnjali RanjanaNo ratings yet
- Large Angle Rutherford Scattering of α-Particles from Gold FoilDocument12 pagesLarge Angle Rutherford Scattering of α-Particles from Gold Foilharoon khanNo ratings yet
- INPhO 2008 - 2020 Indian National Physics OlympiadDocument362 pagesINPhO 2008 - 2020 Indian National Physics OlympiadSubhankar TripathiNo ratings yet
- Digital Design Project 5 and Project 6 Synchronous Sequential Logic and Registers and CountersDocument10 pagesDigital Design Project 5 and Project 6 Synchronous Sequential Logic and Registers and CountersJanus Rau CunananNo ratings yet
- New Structure of LoudspeakerDocument6 pagesNew Structure of LoudspeakermerrickNo ratings yet
- Basics of CCDs and Astronomical ImagingDocument127 pagesBasics of CCDs and Astronomical Imagingsd6433No ratings yet
- Lecture 4Document9 pagesLecture 4SteveNo ratings yet
- Module 9: Electromagnetic Waves-I Lecture 9: Electromagnetic Waves-IDocument5 pagesModule 9: Electromagnetic Waves-I Lecture 9: Electromagnetic Waves-IDr Srini vasanNo ratings yet
- cs229 Notes10 PDFDocument6 pagescs229 Notes10 PDFAlpha WolfNo ratings yet
- Tabla y Mapas de KarnaughDocument10 pagesTabla y Mapas de KarnaughManuel CastroNo ratings yet
- Estadistica Datos Simples EJERCICIO PUNTO 1Document3 pagesEstadistica Datos Simples EJERCICIO PUNTO 1Daniela AragnelliNo ratings yet
- Galaxy Alignment: Frank C. Van Den Bosch (MPIA)Document20 pagesGalaxy Alignment: Frank C. Van Den Bosch (MPIA)dendi231No ratings yet
- Livrocpp PDFDocument421 pagesLivrocpp PDFJoel CezarNo ratings yet
- Energy and Momentum - Ballistic Pendulum: 4.1 PurposeDocument6 pagesEnergy and Momentum - Ballistic Pendulum: 4.1 Purposejobel alejandrinoNo ratings yet
- Presentación de Diseño y Tecnología Morado y RosaDocument15 pagesPresentación de Diseño y Tecnología Morado y RosaAlfonsina Olea SanchezNo ratings yet
- Discrete Time DynamicsDocument17 pagesDiscrete Time DynamicsfushgeorgeNo ratings yet
- DW 4 BitDocument2 pagesDW 4 BitmirosehNo ratings yet
- EE2001-Tutorial 7 Date: 15 March 2018 Registers and CountersDocument11 pagesEE2001-Tutorial 7 Date: 15 March 2018 Registers and CountersAnamika SinhaNo ratings yet
- Car GarageDocument11 pagesCar Garagealiaabfcai25No ratings yet
- Crack The Code: Left: RightDocument2 pagesCrack The Code: Left: RightRuben Delos SantosNo ratings yet
- Lyapunov PDFDocument11 pagesLyapunov PDF정문열No ratings yet
- Task 1: Make The Circuit of 2-Bit Magnitude Comparator and Fill The Truth Table. Solution: Truth TableDocument4 pagesTask 1: Make The Circuit of 2-Bit Magnitude Comparator and Fill The Truth Table. Solution: Truth Tablewaleed infoNo ratings yet
- ASCII ImagesDocument4 pagesASCII ImageselmofoNo ratings yet
- (Lark Jewelry Books) Nathalie Mornu - Leather Jewelry - 30 Contemporary Projects-Lark Books (2010) PDFDocument132 pages(Lark Jewelry Books) Nathalie Mornu - Leather Jewelry - 30 Contemporary Projects-Lark Books (2010) PDFJosé Oneris DissenhaNo ratings yet
- StatesDocument1 pageStatesBRYAN ALFRED FERRERNo ratings yet
- Fractals and Fractal DimensionDocument4 pagesFractals and Fractal DimensionAhmet KumbasarNo ratings yet
- 2019 DigitalTwinProcessIndustries LNSDocument42 pages2019 DigitalTwinProcessIndustries LNSmgiordyNo ratings yet
- Mechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions ManualDocument26 pagesMechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions ManualNicoleTuckeroajx100% (52)
- Traffic Delay Study PDFDocument17 pagesTraffic Delay Study PDFjvinothupendraNo ratings yet
- Long Term Questions: DirectionsDocument14 pagesLong Term Questions: Directionsrajesh.purkar9378No ratings yet
- Plastic Design of A Fixed-Fixed Beam-Column: 1 Beam (With No Axial Load)Document8 pagesPlastic Design of A Fixed-Fixed Beam-Column: 1 Beam (With No Axial Load)Mohammad AslamNo ratings yet
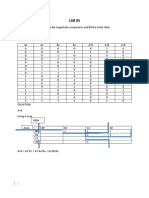
- Engr 357 Lab 4Document9 pagesEngr 357 Lab 4Shyam ThangaNo ratings yet
- 2023-02-28 Statement - USB Checking 4053Document4 pages2023-02-28 Statement - USB Checking 4053mondol miaNo ratings yet
- Q1 Sum. Test Math 4 2021 22Document4 pagesQ1 Sum. Test Math 4 2021 22JOVEN SARONNo ratings yet
- NetAcad Wall Plaque Full ColorDocument1 pageNetAcad Wall Plaque Full ColoromarmNo ratings yet
- Assignment #1: SolutionDocument2 pagesAssignment #1: SolutionAll OneNo ratings yet
- TotalDocument5 pagesTotalsebastian delgadillo ramirezNo ratings yet
- Assignment #1: SolutionDocument2 pagesAssignment #1: SolutionAll OneNo ratings yet
- Assignment #1: SolutionDocument2 pagesAssignment #1: SolutionAll OneNo ratings yet
- Geek Sector MagazineDocument13 pagesGeek Sector MagazineSebastian Flores VelascoNo ratings yet
- Pague Com Pix: Banco Do BrasilDocument1 pagePague Com Pix: Banco Do BrasilLuana SousaNo ratings yet
- Saccadic Eye Movements in The Psikharpax RobotDocument12 pagesSaccadic Eye Movements in The Psikharpax RobotFelixQuipotuitNo ratings yet
- Assignment #1: SolutionDocument2 pagesAssignment #1: SolutionAll OneNo ratings yet
- Assignment #1: SolutionDocument2 pagesAssignment #1: SolutionAll OneNo ratings yet
- Min PotentialDocument14 pagesMin PotentialSyed Wajih Ul HassanNo ratings yet
- Full Download Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions ManualDocument36 pagesFull Download Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions Manualbridieditch100% (40)
- Modelo Tabla de VerdadDocument8 pagesModelo Tabla de VerdadLAURA STEFANY VIVEROS PAREDESNo ratings yet
- Newtons Laws: By: Armaan NooraniDocument10 pagesNewtons Laws: By: Armaan NooraniArmaan NooraniNo ratings yet
- Make Up Water.r1Document54 pagesMake Up Water.r1Ranu JanuarNo ratings yet
- Reinforced - Concrete Design IIDocument54 pagesReinforced - Concrete Design IIgendadeyu552625No ratings yet
- 734 Part2 EmulsionDocument28 pages734 Part2 EmulsionSuvin PsNo ratings yet
- Dance - Lars Chittka PDFDocument3 pagesDance - Lars Chittka PDFprabhudevmvNo ratings yet
- C26x Enm C57a PDFDocument1,284 pagesC26x Enm C57a PDFmn090078dNo ratings yet
- Types and Characteristics of Precipitation - pdf-395658211 PDFDocument8 pagesTypes and Characteristics of Precipitation - pdf-395658211 PDFGio TtaNo ratings yet
- Source: "Sears and Zemansky's University Physics With: Fig. 1. The Work Done On A Baseball Moving inDocument8 pagesSource: "Sears and Zemansky's University Physics With: Fig. 1. The Work Done On A Baseball Moving inMaria Diane DizonNo ratings yet
- Phasewatcher VXDocument2 pagesPhasewatcher VXAgis Rijal AtmawijayaNo ratings yet
- Guide To Better Geotextile Specifying US FABRICSDocument19 pagesGuide To Better Geotextile Specifying US FABRICSOladunni AfolabiNo ratings yet
- Acoustic Emission March 2004 - Back To BasicsDocument16 pagesAcoustic Emission March 2004 - Back To BasicsfndandanNo ratings yet
- API 610 Major Changes From 5th Through 10th Editions 2Document1 pageAPI 610 Major Changes From 5th Through 10th Editions 2ahmedNo ratings yet
- Sts ReviewerDocument7 pagesSts ReviewerLyca Agelica BalonggaNo ratings yet
- VI - Self Study Exam Preparatory Note-Part 1Document148 pagesVI - Self Study Exam Preparatory Note-Part 1Charlie Chong100% (1)
- LV TrafoDocument38 pagesLV TrafoApik SubagyaNo ratings yet
- Mobilgrease XHP 222Document2 pagesMobilgrease XHP 222Stefan Cel MareNo ratings yet
- Budget Work Sample in Science 3Document5 pagesBudget Work Sample in Science 3Nar ZieNo ratings yet
- 2Nd Experiment "Coagulation - Floculation Analysis Using Jar - Test Method"Document15 pages2Nd Experiment "Coagulation - Floculation Analysis Using Jar - Test Method"garum_1No ratings yet
- Calculating Eigenvalues of Many-Body Systems From Partition FunctionsDocument25 pagesCalculating Eigenvalues of Many-Body Systems From Partition FunctionsAmina IbrahimNo ratings yet
- Hydrograph ComponentsDocument4 pagesHydrograph ComponentsJoseph Daniel LucilloNo ratings yet
- Seam DefectDocument4 pagesSeam DefectPatrick Dominguez100% (2)
- MA103 Lab 6 SolutionsDocument2 pagesMA103 Lab 6 Solutionssubway9113No ratings yet
- ResumeDocument2 pagesResumeapi-252798605No ratings yet
- The Epoxy BookDocument37 pagesThe Epoxy BookEvTech PhilNo ratings yet
- Neutron LogDocument56 pagesNeutron LogYansyah Oktriono Putra67% (3)
- Question PaperDocument1 pageQuestion PaperDeepak PradhanNo ratings yet
- CUOBOGASDocument4 pagesCUOBOGASDiego Fernando Pedroza UribeNo ratings yet
- Karakteristik Motor KomponDocument14 pagesKarakteristik Motor KomponPola RismaNo ratings yet
- Protection Relay - ANSI Standards - EEPDocument10 pagesProtection Relay - ANSI Standards - EEPmuraliNo ratings yet
- Fan Secimi HesabıDocument11 pagesFan Secimi HesabıOguzhanKNo ratings yet