You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Raisbeck King Air Parts Manual 85-119-D - ODocument562 pagesRaisbeck King Air Parts Manual 85-119-D - Oairjayhawk100% (1)
- Cat Forklift Vc60d Service ManualDocument27 pagesCat Forklift Vc60d Service Manualethanmann190786ikm99% (90)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
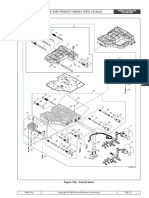
- Allison 1000 and 2000 Product Families Parts CatalogDocument9 pagesAllison 1000 and 2000 Product Families Parts CatalogRobert WhooleyNo ratings yet
- 5TON, Operator's ManualDocument348 pages5TON, Operator's ManualMichael Kalbfleisch100% (2)
- Gi Catalogue 2015Document88 pagesGi Catalogue 2015Khairudin Ahmad MINo ratings yet
- Каталог JLG1250Document446 pagesКаталог JLG1250andNo ratings yet
- Terminal Tractor: Kalmar TL2Document106 pagesTerminal Tractor: Kalmar TL2Rami AbdelaalNo ratings yet
- Machine Check SheetDocument5 pagesMachine Check Sheetvs.prabhu0% (1)
- "Ford Edsel" Brand Failure Case Study and Business Lessons PDFDocument39 pages"Ford Edsel" Brand Failure Case Study and Business Lessons PDFmudassir habibNo ratings yet
- TK1026 01 ManualDocument79 pagesTK1026 01 ManualTifacor100% (1)
- Internship Final Project ReportDocument28 pagesInternship Final Project ReportDAS VICKY MANOJBHAI80% (5)
- Mini Project Report - IV-A-Batch No-20Document40 pagesMini Project Report - IV-A-Batch No-20RITESH RATHORENo ratings yet
- TFG AlexisNavarroVaqueraDocument54 pagesTFG AlexisNavarroVaqueraRITESH RATHORENo ratings yet
- Drivetrain and Differential: Forces To Be Calculated: Aerodynamic Drag Total Resisting ForceDocument1 pageDrivetrain and Differential: Forces To Be Calculated: Aerodynamic Drag Total Resisting ForceRITESH RATHORENo ratings yet
- Statement of Account: Invoice Number Invoice Description Due Date Invoice Amount Current BalanceDocument1 pageStatement of Account: Invoice Number Invoice Description Due Date Invoice Amount Current BalanceRITESH RATHORENo ratings yet
- Development of A Power-Train For A Formula SAE Competition VehicleDocument9 pagesDevelopment of A Power-Train For A Formula SAE Competition VehicleRITESH RATHORENo ratings yet
- PSDGORILLASTE 46065 M Postponement 30112022034840 43Document3 pagesPSDGORILLASTE 46065 M Postponement 30112022034840 43RITESH RATHORENo ratings yet
- Me2608, Me3604, Me5541Document11 pagesMe2608, Me3604, Me5541RITESH RATHORENo ratings yet
- TransmissionDocument15 pagesTransmissionRITESH RATHORENo ratings yet
- lr2 GearDocument6 pageslr2 GearRITESH RATHORENo ratings yet
- Optimizing Gear Ratio Selection For Lap Performance: Vehicle ModelsDocument9 pagesOptimizing Gear Ratio Selection For Lap Performance: Vehicle ModelsRITESH RATHORENo ratings yet
- 1.5T 2.0T Diesel Forklift Quotation HB20230310)Document2 pages1.5T 2.0T Diesel Forklift Quotation HB20230310)alliance maubiNo ratings yet
- IoT Applications in TransportationDocument10 pagesIoT Applications in Transportation有川静寂No ratings yet
- COUGAR 17 - 20 - Manual (Floor Scrubber)Document11 pagesCOUGAR 17 - 20 - Manual (Floor Scrubber)itbecourtneyNo ratings yet
- PGCB 2015Document4 pagesPGCB 2015আশিক পালোয়ানNo ratings yet
- AITA 002 Inching Pedal Usage Ver 3Document2 pagesAITA 002 Inching Pedal Usage Ver 3Tawfiq ZidanNo ratings yet
- Jeepneys (Art App)Document3 pagesJeepneys (Art App)Carla RosarioNo ratings yet
- Project Work On TATA OF PERFORMANCE APPRAISALDocument12 pagesProject Work On TATA OF PERFORMANCE APPRAISALdevil hNo ratings yet
- 12 Volt Bar-Mount Chain Saw Sharpener Owner'S Manual: Item # 141259Document8 pages12 Volt Bar-Mount Chain Saw Sharpener Owner'S Manual: Item # 141259Relyax ColiliNo ratings yet
- Volvo Buses PressRelease New Coach Range ALLDocument14 pagesVolvo Buses PressRelease New Coach Range ALLRaj ThakurNo ratings yet
- Ultra SecretoDocument7 pagesUltra SecretoKey ChipNo ratings yet
- STANDAR HARGA BARANG 2020 (PDF Version) (Autosaved) Net Ok21Document110 pagesSTANDAR HARGA BARANG 2020 (PDF Version) (Autosaved) Net Ok21leleulija luckyNo ratings yet
- Waterjet Stone EngDocument23 pagesWaterjet Stone EngMohammed RinasNo ratings yet
- Gear Condition Monitoring Technics: December 2017Document26 pagesGear Condition Monitoring Technics: December 2017Ashwin MahoneyNo ratings yet
- Universal AV Systems: 2020 Alpine Price ListDocument4 pagesUniversal AV Systems: 2020 Alpine Price ListMarv PascNo ratings yet
- Fuel Filter, Spin-On: Add To ListDocument3 pagesFuel Filter, Spin-On: Add To ListAtaa AssaadNo ratings yet
- 1540 - Kat - EM - en - LoRes Elektromotoren PDFDocument134 pages1540 - Kat - EM - en - LoRes Elektromotoren PDFSavin CristiNo ratings yet
- G10 - Unit 2 - Grammar Challenge PDFDocument1 pageG10 - Unit 2 - Grammar Challenge PDFTed TomNo ratings yet
- Hydraulic Brake System Full ReportDocument3 pagesHydraulic Brake System Full ReportGautam VatsNo ratings yet
- M12341 MONTE CARLO 5S EN Light PDFDocument6 pagesM12341 MONTE CARLO 5S EN Light PDFAnker GeertsenNo ratings yet