You might also like
- Mechanical Aptitude Test 080609Document63 pagesMechanical Aptitude Test 080609Soonyam100% (11)
- Ford 40 Series Workshop Manual-UnlockedDocument279 pagesFord 40 Series Workshop Manual-UnlockedArran Lange86% (7)
- ATRA Ford AX4S AX4ODE Rebuild ProceduresDocument145 pagesATRA Ford AX4S AX4ODE Rebuild ProceduresHugo Sanchez100% (3)
- Caterpillar JLG Parts ManualDocument320 pagesCaterpillar JLG Parts ManualJuan Esteban Sloboda ArangurenNo ratings yet
- U151e PDFDocument155 pagesU151e PDFAlejandro Roldan Valle88% (8)
- Service Manual: Spicer Single Drive AxlesDocument44 pagesService Manual: Spicer Single Drive Axlessummoner001No ratings yet
- Stardew Valley CalculatorDocument10 pagesStardew Valley CalculatorWidy ArifinNo ratings yet
- Puddle Flange Thickness Sheet-P2m-R0Document1 pagePuddle Flange Thickness Sheet-P2m-R0Faisal MumtazNo ratings yet
- ZF-AV110 Presentation enDocument6 pagesZF-AV110 Presentation enjasogti100% (1)
- Cat Transmission 938G 2 Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - JSPDocument5 pagesCat Transmission 938G 2 Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - JSPMehdi Chakroune100% (1)
- Cat Forklift Pd10000 Pd11000 Pd12000 Pd8000 Schematic Service Operation Maintenance ManualDocument27 pagesCat Forklift Pd10000 Pd11000 Pd12000 Pd8000 Schematic Service Operation Maintenance Manualmichellemacias080283gfz100% (49)
- Caterpillar 777D SN 2255 Hand Out PDFDocument50 pagesCaterpillar 777D SN 2255 Hand Out PDFamardeep surinNo ratings yet
- Voltage Drop CalculationsDocument8 pagesVoltage Drop CalculationsYousif_AbdalhalimNo ratings yet
- Agrolux 4.80e Workshop ManualDocument438 pagesAgrolux 4.80e Workshop ManualMinn Thet Naing100% (1)
- Voltage Drop CalculationsDocument8 pagesVoltage Drop CalculationsYousif_AbdalhalimNo ratings yet
- Porsche 912E Service InformationDocument47 pagesPorsche 912E Service InformationOscar Hamer100% (1)
- mf8160 PDFDocument717 pagesmf8160 PDFigorkovNo ratings yet
- Dasar Chassis-DikonversiDocument50 pagesDasar Chassis-DikonversiImran RusyanaNo ratings yet
- Catalogo de Peças TL75EDocument1,225 pagesCatalogo de Peças TL75EMarcio Roberto de Macedo ReisNo ratings yet
- Kubota MX 5100Document236 pagesKubota MX 5100Alex GarciaNo ratings yet
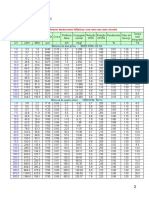
- Tabela 1 - Características técnicas de motores assíncronos trifásicosDocument2 pagesTabela 1 - Características técnicas de motores assíncronos trifásicosRVVG20011No ratings yet
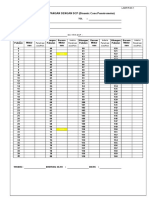
- UJI LAPANGAN DENGAN DCP (Dinamic Cone Penetrometer) : Lampiran 1Document19 pagesUJI LAPANGAN DENGAN DCP (Dinamic Cone Penetrometer) : Lampiran 1kosasih aji somantriNo ratings yet
- Hooks JointDocument26 pagesHooks JointYasiru KaluarachchiNo ratings yet
- Posición-Velocidad: X V (CM/S) ADocument2 pagesPosición-Velocidad: X V (CM/S) AalexNo ratings yet
- K3 - Annisa Rifdah Maghfira - H031191040Document2 pagesK3 - Annisa Rifdah Maghfira - H031191040Annisa RifdahNo ratings yet
- Chapter 5. Control Valve Selection: Cast Carbon Steel (ASTM A216 Grade WCC) - WCC Is The Most PopDocument8 pagesChapter 5. Control Valve Selection: Cast Carbon Steel (ASTM A216 Grade WCC) - WCC Is The Most PopRedzaNo ratings yet
- H 0.9 CM, HT 2.3 Bar, L 30 CM Beban M (KG) N (RPM) V (Volt) I (Ampere)Document4 pagesH 0.9 CM, HT 2.3 Bar, L 30 CM Beban M (KG) N (RPM) V (Volt) I (Ampere)fadel albasithNo ratings yet
- Stress Analysis ChartDocument12 pagesStress Analysis ChartMadeleinePumaPacoriNo ratings yet
- H 0.9 CM, HT 2.3 Bar, L 30 CM Beban M (KG) N (RPM) V (Volt) I (Ampere)Document4 pagesH 0.9 CM, HT 2.3 Bar, L 30 CM Beban M (KG) N (RPM) V (Volt) I (Ampere)fadel albasithNo ratings yet
- Dynamics Lab Report: Geneva MechanismDocument17 pagesDynamics Lab Report: Geneva MechanismBhargav PurimetlaNo ratings yet
- P9999mko 2Document26 pagesP9999mko 2otman geotechChausséeNo ratings yet
- Oa Crit DamageDocument6 pagesOa Crit DamageJulianNo ratings yet
- Approximate Weights (LBS.) For 90° and 45° Elbows and 180° Long Radius ReturnsDocument28 pagesApproximate Weights (LBS.) For 90° and 45° Elbows and 180° Long Radius ReturnsGabriel Alvarez RojasNo ratings yet
- Lab Slide CrankDocument8 pagesLab Slide CrankMuhd AriffNo ratings yet
- Technical CatalogueDocument22 pagesTechnical Cataloguerupali patilNo ratings yet
- Temperature Derating and Tripping Curves-SignedDocument4 pagesTemperature Derating and Tripping Curves-SignedDexter DuaNo ratings yet
- Air Bending Chart Lasercut CapacityDocument1 pageAir Bending Chart Lasercut CapacitySteve BottomleyNo ratings yet
- Air Bending Chart Lasercut CapacityDocument1 pageAir Bending Chart Lasercut Capacitys bNo ratings yet
- ZDY Series cylindrical gear reducer performance specificationsDocument13 pagesZDY Series cylindrical gear reducer performance specificationsGarry Yan DiazNo ratings yet
- Zsy Gearbox SogearsDocument12 pagesZsy Gearbox SogearsGear motorsNo ratings yet
- Dynamic - Ampacity 2020Document2 pagesDynamic - Ampacity 2020Jar son PascuaNo ratings yet
- Lab 2Document1 pageLab 2Hassaan ArshadNo ratings yet
- 3 Support NTC ChartDocument1 page3 Support NTC Chartsidahmed latsameniaNo ratings yet
- Cable Ampacity and SC RatingDocument3 pagesCable Ampacity and SC RatingPrateekNo ratings yet
- Gujarati BooksDocument7 pagesGujarati Booksparthivjethi100% (1)
- D Cumilé D D'action S Deblai S Remblai V DeblaiDocument10 pagesD Cumilé D D'action S Deblai S Remblai V DeblaiaaerNo ratings yet
- CrankDocument12 pagesCrankAzim MazmaNo ratings yet
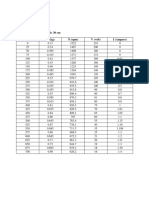
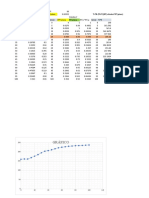
- Timpo Medidas I I Acumulado Log T (Xi) (Mim) (CM) CM/HDocument7 pagesTimpo Medidas I I Acumulado Log T (Xi) (Mim) (CM) CM/HGILBERTO BALLÓN BACANo ratings yet
- Sysnchronous Generator Transient Analysis2Document18 pagesSysnchronous Generator Transient Analysis2mnsatyaniNo ratings yet
- Book 1Document11 pagesBook 1Aditya DhokneNo ratings yet
- THG Hooks BrochureDocument1 pageTHG Hooks BrochureCristian Alonso Gonzalez MolinaNo ratings yet
- Specified Torque For Standard Bolts: Service SpecificationsDocument1 pageSpecified Torque For Standard Bolts: Service SpecificationsClodoaldo BiassioNo ratings yet
- Laboratorio1 Paralelo1Document4 pagesLaboratorio1 Paralelo1Leyton FloresNo ratings yet
- Single Core/pvc /cuDocument20 pagesSingle Core/pvc /cuIbrahim ElsaiyedNo ratings yet
- Engineering Materials Dr. TarekDocument118 pagesEngineering Materials Dr. TareksheshirNo ratings yet
- Built-In Freewheels: P-7426-SC-A4 10/18Document2 pagesBuilt-In Freewheels: P-7426-SC-A4 10/18Silviu DochiaNo ratings yet
- Tabel Valori TermorezistentaDocument7 pagesTabel Valori TermorezistentaCristian NedelcuNo ratings yet
- Microecon HW Ch08Document16 pagesMicroecon HW Ch08Dian Nur IlmiNo ratings yet
- Angle Iload Uload IsDocument10 pagesAngle Iload Uload IsVienNgocQuangNo ratings yet
- Cond AluminioDocument40 pagesCond Aluminiorodolfoordiguez_70No ratings yet
- Ejercicio de Reologia - RotacionalDocument6 pagesEjercicio de Reologia - RotacionalJeffren Arturo Cuja PadillaNo ratings yet
- Beam Design 230 X 375 - m20Document2 pagesBeam Design 230 X 375 - m20DarsHan MoHanNo ratings yet
- Regla de NewmanDocument2 pagesRegla de NewmanCarolina De LeonNo ratings yet
- Demand Estimation Data Set For Studnets 2021Document5 pagesDemand Estimation Data Set For Studnets 2021Shehan AnuradaNo ratings yet
- Simulated AnnealingDocument54 pagesSimulated AnnealingAditiLavigneNo ratings yet
- KaplanDocument8 pagesKaplanAHMED SAKIB 1807005No ratings yet
- Torsion TestDocument7 pagesTorsion TestAmmar AlaufiNo ratings yet
- Hubungan Antara Massa Beban Dan Perpanjangan PegasDocument6 pagesHubungan Antara Massa Beban Dan Perpanjangan PegasPramita Rimba CahyaniNo ratings yet
- Hubungan Antara Massa Beban Dan Perpanjangan PegasDocument6 pagesHubungan Antara Massa Beban Dan Perpanjangan PegasPramita Rimba CahyaniNo ratings yet
- Welding CablesDocument1 pageWelding CablesanuradhaNo ratings yet
- Dimensions and Weights for Anchor Chains and FittingsDocument4 pagesDimensions and Weights for Anchor Chains and FittingsOzata TersanesiNo ratings yet
- Molding Decorative Price ListDocument9 pagesMolding Decorative Price ListMohammad Hossein SajjadNo ratings yet
- Oil Field Pumping MotorsDocument2 pagesOil Field Pumping MotorsFelipe EscuderoNo ratings yet
- Data Kekuatan Geser LangsungDocument6 pagesData Kekuatan Geser LangsungIsa YunanNo ratings yet
- Balancing Rotating MassesDocument11 pagesBalancing Rotating MassesYasiru KaluarachchiNo ratings yet
- Equivalent Moment of InertiaDocument12 pagesEquivalent Moment of InertiaYasiru KaluarachchiNo ratings yet
- Balancing Rotating MassesDocument11 pagesBalancing Rotating MassesYasiru KaluarachchiNo ratings yet
- Bending of Beams: ME1100 Mechanics of Materials - I Calculation Report Semester: 2Document19 pagesBending of Beams: ME1100 Mechanics of Materials - I Calculation Report Semester: 2Yasiru KaluarachchiNo ratings yet
- Traction Control ArticleDocument8 pagesTraction Control ArticledromakiNo ratings yet
- Nominal Payload: Operating Weight: Rated Power:: Off-Highway TrucksDocument20 pagesNominal Payload: Operating Weight: Rated Power:: Off-Highway Truckskebbabi abdelhamidNo ratings yet
- Energy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotDocument13 pagesEnergy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotElias GarcíaNo ratings yet
- MidtermDocument14 pagesMidtermAbhishekNo ratings yet
- 06srt10 PartDocument194 pages06srt10 PartAllan Melholt SimonsenNo ratings yet
- Renault Nissan Technical Interview QuestionsDocument2 pagesRenault Nissan Technical Interview Questionssindhu100% (3)
- 2011 Commander 280 Elec Tech SpecDocument6 pages2011 Commander 280 Elec Tech SpecForklift Systems IncorporatedNo ratings yet
- Fiat Allis 645m Wheel Loader Parts Catalog 16f17381Document20 pagesFiat Allis 645m Wheel Loader Parts Catalog 16f17381alex100% (45)
- 848H Timberjack Cable and Grapple Skidder: TX1077888A A.1Document12 pages848H Timberjack Cable and Grapple Skidder: TX1077888A A.1Gilson RodriguesNo ratings yet
- TLT35D Section e - HydraulicDocument112 pagesTLT35D Section e - HydraulicIgor Ferreira dos SantosNo ratings yet
- SAP 051010 in C.R. MAP II 2850 ExpDocument94 pagesSAP 051010 in C.R. MAP II 2850 ExpMarceloGonçalvesNo ratings yet
- Link Belt ATC3130sDocument8 pagesLink Belt ATC3130sOscar CampoNo ratings yet
- A - Unsprung Mass Is Kept Minimum: - Is The Central Components of The Chain Converter Transmission.Document6 pagesA - Unsprung Mass Is Kept Minimum: - Is The Central Components of The Chain Converter Transmission.Senthil Muthu Kumar TNo ratings yet
- Group 2 Operational Checks and TroubleshootingDocument12 pagesGroup 2 Operational Checks and TroubleshootingREMZONANo ratings yet