You might also like
- Dynamics LAB Report 2Document11 pagesDynamics LAB Report 2Bhargav PurimetlaNo ratings yet
- The Mechanics of Clockwork - Lever Escapements, Cylinder Escapements, Verge Escapements, Shockproof Escapements, and Their Maintenance and RepairFrom EverandThe Mechanics of Clockwork - Lever Escapements, Cylinder Escapements, Verge Escapements, Shockproof Escapements, and Their Maintenance and RepairRating: 5 out of 5 stars5/5 (1)
- Experiment No: 1: Slotted Link Mechanism ExperimentDocument4 pagesExperiment No: 1: Slotted Link Mechanism ExperimentSamina TariqNo ratings yet
- Engineering Dynamics Lab ReportDocument10 pagesEngineering Dynamics Lab ReportMian Abdul RehmanNo ratings yet
- Lab Slide CrankDocument8 pagesLab Slide CrankMuhd AriffNo ratings yet
- GL 110 Cam and Follower Apparatus operating instructionsDocument20 pagesGL 110 Cam and Follower Apparatus operating instructionsAurangzebNo ratings yet
- Hooks JointDocument26 pagesHooks JointYasiru KaluarachchiNo ratings yet
- Hook's JointDocument25 pagesHook's JointYasiru KaluarachchiNo ratings yet
- Exp 7 Crank and Slider MechanismDocument11 pagesExp 7 Crank and Slider MechanismSphumelele SibuthaNo ratings yet
- Scotch YokeDocument7 pagesScotch YokeSandeela NaveedNo ratings yet
- 2019-Me-111 Lab Report 1 (Slider Crank Mechanism)Document10 pages2019-Me-111 Lab Report 1 (Slider Crank Mechanism)touqeerahmad 9058No ratings yet
- EN22302830 Kithsara.G, D G 1 ADocument15 pagesEN22302830 Kithsara.G, D G 1 ADenuka KithsaraNo ratings yet
- Engineering Materials Dr. TarekDocument118 pagesEngineering Materials Dr. TareksheshirNo ratings yet
- Torsion TestDocument7 pagesTorsion TestAmmar AlaufiNo ratings yet
- VIBRATION LAB MANUAL Qasmi KhattakDocument15 pagesVIBRATION LAB MANUAL Qasmi KhattakAli AhmadNo ratings yet
- Luminaire PropertyDocument7 pagesLuminaire PropertyLucas NunesNo ratings yet
- 11kV or 33kV Cable Sizing CalculationDocument1 page11kV or 33kV Cable Sizing Calculationanamulk-183% (18)
- LED Luminaire Photometric Test ReportDocument7 pagesLED Luminaire Photometric Test ReportGonzalo LunaNo ratings yet
- CrankDocument12 pagesCrankAzim MazmaNo ratings yet
- Exp 1Document6 pagesExp 1Muhammad Moin KhanNo ratings yet
- Crank Report ZullalyaanumnaqiuDocument5 pagesCrank Report ZullalyaanumnaqiuDKMF1054 MUHAMMAD SALMANNo ratings yet
- Luminaire PropertyDocument7 pagesLuminaire PropertyLucas NunesNo ratings yet
- Laboratorio de Fisica InvDocument9 pagesLaboratorio de Fisica InvAndres GrimaldoNo ratings yet
- 05 Flange Couplings MONOLASTICDocument4 pages05 Flange Couplings MONOLASTICMuhammadYousufAttariNo ratings yet
- Slider Crank MechanismDocument3 pagesSlider Crank MechanismMohsin IftikharNo ratings yet
- MMB 2Document8 pagesMMB 2aaschlysebakisoNo ratings yet
- 900 SERIES LIFTING CRANE SPECIFICATIONSDocument9 pages900 SERIES LIFTING CRANE SPECIFICATIONSfiguev2208No ratings yet
- CV10 CV15 Brochure 09.01.2021Document4 pagesCV10 CV15 Brochure 09.01.2021hamadaNo ratings yet
- Terex hc110 Load ChartDocument12 pagesTerex hc110 Load Chartali sultanNo ratings yet
- Slider Crank Mechanism (AutoRecovered)Document6 pagesSlider Crank Mechanism (AutoRecovered)Jàwád QûreShïNo ratings yet
- Chi-Square, Correlation, RegressionDocument6 pagesChi-Square, Correlation, RegressionPrincess SalvadorNo ratings yet
- Lab Report Crank MotionDocument23 pagesLab Report Crank MotionAidil Alidan50% (2)
- Low Speed 1Document16 pagesLow Speed 1dimasNo ratings yet
- Simulation Waiting Line AnalysisDocument88 pagesSimulation Waiting Line AnalysisDimas ReynaldoNo ratings yet
- Wabco Mechanical LSVDocument8 pagesWabco Mechanical LSVmarranNo ratings yet
- التجربة الثانيةDocument18 pagesالتجربة الثانيةAsoo AsoshNo ratings yet
- Zone 1 Zone 2: Ukuran Ayakan Ukuran AyakanDocument20 pagesZone 1 Zone 2: Ukuran Ayakan Ukuran AyakanAgus AwwaNo ratings yet
- Wind Speed and Power Extraction Report from Gujarat CoastDocument32 pagesWind Speed and Power Extraction Report from Gujarat CoastViplav Kumar SinghNo ratings yet
- Experiment 1: ApparatusDocument7 pagesExperiment 1: ApparatusMaria MeharNo ratings yet
- Shaping MachineDocument14 pagesShaping MachineMohammad Javed IqbalNo ratings yet
- Water ShedDocument6 pagesWater Shedankit punethaNo ratings yet
- Experinment-2 of LabDocument3 pagesExperinment-2 of LabRohanNo ratings yet
- EM lab reportDocument50 pagesEM lab reportaqeelarham525No ratings yet
- Ejercicio de Reologia - RotacionalDocument6 pagesEjercicio de Reologia - RotacionalJeffren Arturo Cuja PadillaNo ratings yet
- Component Units 1 2 3 4 5 6: F G F GDocument6 pagesComponent Units 1 2 3 4 5 6: F G F Gbighead3158No ratings yet
- Siap Cam N TappetsDocument18 pagesSiap Cam N TappetsMuhammad Taufiq YusofNo ratings yet
- Engneering Mechanics Lab ManualDocument62 pagesEngneering Mechanics Lab ManualAwais AhmadNo ratings yet
- Resistivity Sounding Data (As Per Is 3043)Document16 pagesResistivity Sounding Data (As Per Is 3043)mrunalNo ratings yet
- Common insulation levels for rated voltages up to 245 kVDocument1 pageCommon insulation levels for rated voltages up to 245 kVavinashuklaNo ratings yet
- GRAFICASDocument19 pagesGRAFICASAlfredo TlapaleNo ratings yet
- Timpo Medidas I I Acumulado Log T (Xi) (Mim) (CM) CM/HDocument7 pagesTimpo Medidas I I Acumulado Log T (Xi) (Mim) (CM) CM/HGILBERTO BALLÓN BACANo ratings yet
- Hydro Paper SolutionDocument7 pagesHydro Paper Solutionzain IshaqNo ratings yet
- Velocidad de InfiltracionDocument3 pagesVelocidad de InfiltracionWillington MoyaNo ratings yet
- Statistical Analysis Software Gross Profit FactorsDocument2 pagesStatistical Analysis Software Gross Profit FactorsMhervin BisisNo ratings yet
- Emg GenDocument2 pagesEmg GenDerar Al-HesanNo ratings yet
- CARACTERISTICAS Y RENDIMIENTO DE LOS POLOS EBERLE - DELCROSADocument4 pagesCARACTERISTICAS Y RENDIMIENTO DE LOS POLOS EBERLE - DELCROSAControl LABNo ratings yet
- Flexible couplings for heavy-duty applicationsDocument1 pageFlexible couplings for heavy-duty applicationsTamal Tanu RoyNo ratings yet
- K Ve (Veh/km/carril) (KM/H) : Chart TitleDocument3 pagesK Ve (Veh/km/carril) (KM/H) : Chart TitleCristhian CBrNo ratings yet
- Voltage Drop CalculationsDocument8 pagesVoltage Drop CalculationsYousif_AbdalhalimNo ratings yet
- LA5030 Econometrics Assignment - 2: Bhargav Purimetla, ME18BTECH11029Document3 pagesLA5030 Econometrics Assignment - 2: Bhargav Purimetla, ME18BTECH11029Bhargav PurimetlaNo ratings yet
- GPA CalculatorDocument4 pagesGPA CalculatorBhargav PurimetlaNo ratings yet
- Econometrics Assignment analysis of chicken demand modelsDocument3 pagesEconometrics Assignment analysis of chicken demand modelsBhargav PurimetlaNo ratings yet
- Econometrics Assignment - 1: P.Bhargav, ME18BTECH11029Document4 pagesEconometrics Assignment - 1: P.Bhargav, ME18BTECH11029Bhargav PurimetlaNo ratings yet
- Whirling of Shafts: Dynamics Lab (ME4435)Document6 pagesWhirling of Shafts: Dynamics Lab (ME4435)Bhargav PurimetlaNo ratings yet
- Lift Vs Speed Hartnell GovernorDocument6 pagesLift Vs Speed Hartnell GovernorBhargav PurimetlaNo ratings yet
- Consumers Guide To The ExpertsDocument406 pagesConsumers Guide To The ExpertsHassan Younhous Traore KonéNo ratings yet
- Introduction to Pidilite IndustriesDocument8 pagesIntroduction to Pidilite IndustriesAbhijit DharNo ratings yet
- K Park 24 TH Edition ChangesDocument8 pagesK Park 24 TH Edition ChangesAnkit ChoudharyNo ratings yet
- G25M R TransmissionDocument29 pagesG25M R TransmissionMaksym VovkNo ratings yet
- Way Back To The BibleDocument19 pagesWay Back To The BiblePearlCladelLapidezNo ratings yet
- Capstone Presentation 2020Document12 pagesCapstone Presentation 2020api-539629427No ratings yet
- Building Power and InfluenceDocument5 pagesBuilding Power and InfluenceQuang-Nam Nguyen100% (1)
- 1 SMDocument9 pages1 SMhasanuddinnst1No ratings yet
- Henry Ford: The Man Who Put America on WheelsDocument15 pagesHenry Ford: The Man Who Put America on WheelsTonny PersonNo ratings yet
- Mil STD 882eDocument104 pagesMil STD 882ecihan dağNo ratings yet
- Pte Academic Test Practice Repeat SentenceDocument3 pagesPte Academic Test Practice Repeat SentenceJackAziz100% (7)
- CIC-presentation of RP-577 PresentationDocument181 pagesCIC-presentation of RP-577 PresentationIbrahim Eldesoky75% (4)
- Emd MPC 543Document25 pagesEmd MPC 543jaskaran singhNo ratings yet
- Course 1 ProjectDocument6 pagesCourse 1 ProjectDhruvNo ratings yet
- Google Wakeword Detection 1 PDFDocument5 pagesGoogle Wakeword Detection 1 PDFÖzgür Bora GevrekNo ratings yet
- Cement and Concrete Research: Amin Abrishambaf, Mário Pimentel, Sandra NunesDocument13 pagesCement and Concrete Research: Amin Abrishambaf, Mário Pimentel, Sandra NunesJoseluis Dejesus AnguloNo ratings yet
- Individualized Learning Program Project Evaluation FormDocument3 pagesIndividualized Learning Program Project Evaluation Formakbisoi1No ratings yet
- Providing Clean Water and Financial Assistance in Binangonan RizalDocument29 pagesProviding Clean Water and Financial Assistance in Binangonan RizalArebeeJayBelloNo ratings yet
- تركيب وتشغيل وحدات تكييف الهواءDocument49 pagesتركيب وتشغيل وحدات تكييف الهواءOmar NabilNo ratings yet
- DTC Codes Mercedes CPC4 EnglishDocument24 pagesDTC Codes Mercedes CPC4 Englishjonny david martinez perez100% (1)
- Presentation - On SVAMITVADocument18 pagesPresentation - On SVAMITVAPraveen PrajapatiNo ratings yet
- 10-09 Oct-Eng-NLDocument4 pages10-09 Oct-Eng-NLdhammadinnaNo ratings yet
- HZVDocument6 pagesHZVnurrozaqNo ratings yet
- Employee Leave Management System: FUDMA Journal of Sciences July 2020Document7 pagesEmployee Leave Management System: FUDMA Journal of Sciences July 2020MOHAMMED ASHICKNo ratings yet
- Ps1 GeneralDocument2 pagesPs1 Generalkulin123456No ratings yet
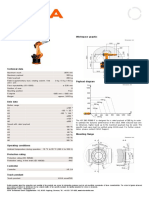
- KR 280 R3080 F technical specificationsDocument1 pageKR 280 R3080 F technical specificationsDorobantu CatalinNo ratings yet
- Service Training: Vorsprung Durch Technik WWW - Audi.deDocument15 pagesService Training: Vorsprung Durch Technik WWW - Audi.depuncimanNo ratings yet
- Installing Juniper Router OS JunOS 10 1 in Qemu VM For GNS3Document4 pagesInstalling Juniper Router OS JunOS 10 1 in Qemu VM For GNS3Adrian Ionut NituNo ratings yet
- History of DentistryDocument24 pagesHistory of DentistryEzhilarasi INo ratings yet
- Strength and Serviceability of Hanger ConnectionsDocument12 pagesStrength and Serviceability of Hanger ConnectionsVitor OlivettiNo ratings yet