You might also like
- AD8200 AnalogDevices Elenota - PLDocument12 pagesAD8200 AnalogDevices Elenota - PLpiotreNo ratings yet
- NE5230, SA5230, SE5230 Low Voltage Operational Amplifier: PDIP 8 N Suffix CASE 626 SOIC 8 D Suffix CASE 751Document18 pagesNE5230, SA5230, SE5230 Low Voltage Operational Amplifier: PDIP 8 N Suffix CASE 626 SOIC 8 D Suffix CASE 751Marcelo OemNo ratings yet
- 200W Single Output DC-DC Converter SpecificationsDocument3 pages200W Single Output DC-DC Converter SpecificationsAntero CasaniNo ratings yet
- DC Current & Voltage Transducers: For Converting DC Signals To A Proportional DC Ma or DC Voltage OutputDocument2 pagesDC Current & Voltage Transducers: For Converting DC Signals To A Proportional DC Ma or DC Voltage OutputlancepacerNo ratings yet
- SD 150 SpecDocument2 pagesSD 150 Specyuni selviaNo ratings yet
- Dual High Output Current, High Speed Amplifier: LoadDocument5 pagesDual High Output Current, High Speed Amplifier: Loadamd reeNo ratings yet
- Milpower TOC Supply M449CDocument3 pagesMilpower TOC Supply M449CChance WolfNo ratings yet
- DatasheetDocument7 pagesDatasheetskrillex the king of the dubstepNo ratings yet
- TIP41G, TIP41AG, TIP41BG, TIP41CG (NPN), TIP42G, TIP42AG, TIP42BG, TIP42CG (PNP) Complementary Silicon Plastic Power TransistorsDocument7 pagesTIP41G, TIP41AG, TIP41BG, TIP41CG (NPN), TIP42G, TIP42AG, TIP42BG, TIP42CG (PNP) Complementary Silicon Plastic Power TransistorsaurelioaraujoNo ratings yet
- ADP3342 - Ultralow, Low Dropout RegulatorDocument9 pagesADP3342 - Ultralow, Low Dropout RegulatorJános Pál HofferNo ratings yet
- Spare Parts: Amp J (AJ)Document11 pagesSpare Parts: Amp J (AJ)JoseNo ratings yet
- Data SheetDocument28 pagesData SheetHeiner QuirogaNo ratings yet
- 4.GPA Series Intelligent Signal Isolation DistributorDocument2 pages4.GPA Series Intelligent Signal Isolation DistributorvuonghkbmzNo ratings yet
- 350W Single Output DC-DC Converter: SeriesDocument3 pages350W Single Output DC-DC Converter: Seriesninjai_thelittleninjaNo ratings yet
- IRF530stmicroelectronics cd00000699-1204277 PDFDocument9 pagesIRF530stmicroelectronics cd00000699-1204277 PDFGermánNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document9 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)GermánNo ratings yet
- Ae15b Ew-3076833Document8 pagesAe15b Ew-3076833skumar_945094No ratings yet
- 1.5A Low Drop Fixed and Adjustable Positive Voltage RegulatorsDocument18 pages1.5A Low Drop Fixed and Adjustable Positive Voltage RegulatorsteknoalexNo ratings yet
- Akaneohm SVDocument18 pagesAkaneohm SVobadaNo ratings yet
- mjd41c DDocument8 pagesmjd41c Dangel ricardo faneitez sandovalNo ratings yet
- Driver Datasheet Ir2112, Inverter ApplicationDocument14 pagesDriver Datasheet Ir2112, Inverter ApplicationmarouaneNo ratings yet
- CN6000Document3 pagesCN6000dwijokopurnomo21_362No ratings yet
- Circuit Note: High Current Driver For The AD2S1210 Resolver-to-Digital Reference Signal OutputDocument4 pagesCircuit Note: High Current Driver For The AD2S1210 Resolver-to-Digital Reference Signal OutputJosé G.No ratings yet
- LM2901NDocument9 pagesLM2901NMohammad ImranNo ratings yet
- HDF 2415 DDocument2 pagesHDF 2415 Dศักดิ์อิเล็กทรอนิกส์ ทุกชนิดNo ratings yet
- FDP3652Document11 pagesFDP3652Dávid KisNo ratings yet
- Ad 8044Document16 pagesAd 8044Hung DangNo ratings yet
- Ad 524Document16 pagesAd 524RAMZANBEENo ratings yet
- Features Description: Micropower Inverting DC/DC ConverterDocument6 pagesFeatures Description: Micropower Inverting DC/DC ConverterJosé FariaNo ratings yet
- 63000Document4 pages63000designselvaNo ratings yet
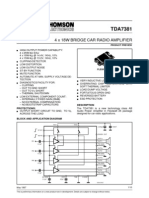
- 4 X 18W Bridge Car Radio Amplifier: Protections: DescriptionDocument10 pages4 X 18W Bridge Car Radio Amplifier: Protections: DescriptionvetchboyNo ratings yet
- ADP 24V enDocument1 pageADP 24V enAniruth SrisuksawadNo ratings yet
- dn200m (Fuente)Document3 pagesdn200m (Fuente)piabNo ratings yet
- SD 200 SpecDocument3 pagesSD 200 SpecAkshata UmeshNo ratings yet
- Signal and Power Isolated RS-485 Transceiver With 15 KV ESD Protection ADM2582E/ADM2587EDocument20 pagesSignal and Power Isolated RS-485 Transceiver With 15 KV ESD Protection ADM2582E/ADM2587EvaibhavNo ratings yet
- N - Channel 600V - 0.48 - 13A - To-247/Isowatt218 Powermesh MosfetDocument9 pagesN - Channel 600V - 0.48 - 13A - To-247/Isowatt218 Powermesh MosfetAlexis AguilarNo ratings yet
- Charge Pump Dc-To-Dc Voltage ConverterDocument11 pagesCharge Pump Dc-To-Dc Voltage ConverterRicardo KraftmanNo ratings yet
- Low Power Quad Voltage Comparator: DescriptionDocument10 pagesLow Power Quad Voltage Comparator: DescriptionJesus Almanzar SantosNo ratings yet
- DDR 30 Spec PDFDocument4 pagesDDR 30 Spec PDFencus170785No ratings yet
- TDE1767, A TDE1787, A: Interface Circuit (Relay and Lamp-Driver)Document11 pagesTDE1767, A TDE1787, A: Interface Circuit (Relay and Lamp-Driver)АнтонNo ratings yet
- Wide Supply Range, Rail-to-Rail Output Instrumentation Amplifier AD8227Document24 pagesWide Supply Range, Rail-to-Rail Output Instrumentation Amplifier AD8227megadaveNo ratings yet
- Fdb2532 - F085: N-Channel Powertrench Mosfet 150V, 79A, 16MDocument11 pagesFdb2532 - F085: N-Channel Powertrench Mosfet 150V, 79A, 16MSukandar TeaNo ratings yet
- Pel Inverter Op-Amf 2302Document26 pagesPel Inverter Op-Amf 2302Asim NawazNo ratings yet
- Low Power Dual Voltage Comparators: N Dip8Document9 pagesLow Power Dual Voltage Comparators: N Dip8Mauricio VillarNo ratings yet
- HCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsDocument9 pagesHCF4066B: Quad Bilateral Switch For Transmission or Multiplexing of Analog or Digital SignalsEngin UzunNo ratings yet
- STPS20H100C: 100 V, 20 A Power Schottky RectifierDocument19 pagesSTPS20H100C: 100 V, 20 A Power Schottky RectifierTodor NakovNo ratings yet
- Trial TVDocument18 pagesTrial TVronal lopezNo ratings yet
- Dual op amp device with wide supply rangeDocument7 pagesDual op amp device with wide supply rangeAlexandre Marido de AluguelNo ratings yet
- TSM102/A: Voltage and Current ControllerDocument10 pagesTSM102/A: Voltage and Current ControllerFranky FernandezNo ratings yet
- D D D D D D D D D D D: Description/ordering InformationDocument9 pagesD D D D D D D D D D D: Description/ordering InformationElectronica coetcNo ratings yet
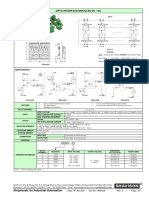
- Opto Interface Modules DC - DC: Peripherals For Industrial AutomationDocument1 pageOpto Interface Modules DC - DC: Peripherals For Industrial Automationvaibhav shigvanNo ratings yet
- Mean Well SD-100 SeriesDocument2 pagesMean Well SD-100 Seriescrash2804No ratings yet
- l6205 Driver MotorDocument21 pagesl6205 Driver MotorLeon MartinezNo ratings yet
- Hoja ValiosaDocument18 pagesHoja Valiosacarlosjamal95No ratings yet
- Order the MC33199D Serial Interface CircuitDocument12 pagesOrder the MC33199D Serial Interface CircuitAbbode HoraniNo ratings yet
- Features Applications: SBOS184 Printed in U.S.A. January, 2001Document16 pagesFeatures Applications: SBOS184 Printed in U.S.A. January, 2001aaronNo ratings yet
- Wide Supply Range, Rail-to-Rail Output Instrumentation AmplifierDocument28 pagesWide Supply Range, Rail-to-Rail Output Instrumentation AmplifierHanifa nur halimahNo ratings yet
- Proportional Valve Controller-PCB Only-: Electronic ControlsDocument2 pagesProportional Valve Controller-PCB Only-: Electronic ControlsSIVARAMANJAGANATHANNo ratings yet
- TLE7209 R InfineonDocument16 pagesTLE7209 R Infineonmobil benerNo ratings yet
- Esdcan01 2blyDocument13 pagesEsdcan01 2blyAdlan MessaoudNo ratings yet
- Huf 76633 S 3 STDocument10 pagesHuf 76633 S 3 STAdlan MessaoudNo ratings yet
- Datasheet 1354Document70 pagesDatasheet 1354Liliana SiscaNo ratings yet
- FM24CL64B Automotive 001-84457 0CDocument19 pagesFM24CL64B Automotive 001-84457 0CAdlan MessaoudNo ratings yet
- Huf 76633 S 3 STDocument10 pagesHuf 76633 S 3 STAdlan MessaoudNo ratings yet
- Advanced Engine Performance Diagnosis: Course # 942600Document116 pagesAdvanced Engine Performance Diagnosis: Course # 942600rodeoaNo ratings yet
- Rectifier Diodes BYV32E, BYV32EB Series Ultrafast, Rugged: Features Symbol Quick Reference DataDocument7 pagesRectifier Diodes BYV32E, BYV32EB Series Ultrafast, Rugged: Features Symbol Quick Reference Datajose luisNo ratings yet
- HGTG11N120CND: 43A, 1200V, NPT Series N-Channel IGBT With Anti-Parallel Hyperfast Diode FeaturesDocument8 pagesHGTG11N120CND: 43A, 1200V, NPT Series N-Channel IGBT With Anti-Parallel Hyperfast Diode FeaturesSalar AbdollahiNo ratings yet
- Rectifier Diodes BYV32E, BYV32EB Series Ultrafast, Rugged: Features Symbol Quick Reference DataDocument7 pagesRectifier Diodes BYV32E, BYV32EB Series Ultrafast, Rugged: Features Symbol Quick Reference Datajose luisNo ratings yet
- 93C56 STMicroelectronicsDocument27 pages93C56 STMicroelectronicsAnderson AtanásioNo ratings yet
- SMR SMVDocument1 pageSMR SMVAdlan MessaoudNo ratings yet
- Huf 76633 S 3 STDocument10 pagesHuf 76633 S 3 STAdlan MessaoudNo ratings yet
- Interfas de Sensores Automotricez (Psi5)Document4 pagesInterfas de Sensores Automotricez (Psi5)José Manuel Izea NavarroNo ratings yet
- Energies: Intake Air Mass Observer Design Based On Extended Kalman Filter For Air-Fuel Ratio Control On SI EngineDocument12 pagesEnergies: Intake Air Mass Observer Design Based On Extended Kalman Filter For Air-Fuel Ratio Control On SI EngineAdlan MessaoudNo ratings yet
- TLE4226GDocument16 pagesTLE4226GGG Módulos AutomotivosNo ratings yet
- TLE7209 R InfineonDocument16 pagesTLE7209 R Infineonmobil benerNo ratings yet
- 8051 SchematicDocument37 pages8051 SchematicShabeeb Ali OruvangaraNo ratings yet
- E11 and E8 ConnectorDocument1 pageE11 and E8 ConnectorAdlan MessaoudNo ratings yet
- Rectifier Diodes BYV32E, BYV32EB Series Ultrafast, Rugged: Features Symbol Quick Reference DataDocument7 pagesRectifier Diodes BYV32E, BYV32EB Series Ultrafast, Rugged: Features Symbol Quick Reference Datajose luisNo ratings yet
- NGD8201B ONSemiconductorDocument6 pagesNGD8201B ONSemiconductorAdlan MessaoudNo ratings yet
- Dac 08Document11 pagesDac 08Adlan MessaoudNo ratings yet
- Tables Maps WinolsDocument1 pageTables Maps WinolsAdlan MessaoudNo ratings yet
- SSN AssignmentDocument24 pagesSSN AssignmentShikha BhattNo ratings yet
- Analysis and Simulation of Biquad Filters Using LTSPICEDocument22 pagesAnalysis and Simulation of Biquad Filters Using LTSPICE2K19/EE/259 TUSHARNo ratings yet
- Hybrid Solar-Wind Power Generation SystemDocument7 pagesHybrid Solar-Wind Power Generation Systemglobalrevolution100% (1)
- Ec 201 Lecture 20Document6 pagesEc 201 Lecture 20Abdul Karim KhanNo ratings yet
- INSTRUMENTATION ACTIVE FILTERSDocument10 pagesINSTRUMENTATION ACTIVE FILTERSbobNo ratings yet
- Engg PDFDocument2,369 pagesEngg PDFshobhitgupta61440% (1)
- MinimaConstructionGuide R7Document65 pagesMinimaConstructionGuide R7fox7878100% (1)
- High-Voltage, High-Power, ZVS, Full-Bridge PWM Converter Employing An Active SnubberDocument8 pagesHigh-Voltage, High-Power, ZVS, Full-Bridge PWM Converter Employing An Active Snubberdr psNo ratings yet
- ETSI ES 201 235-3: Specification of Dual Tone Multi-Frequency (DTMF) Transmitters and Receivers Part 3: ReceiversDocument12 pagesETSI ES 201 235-3: Specification of Dual Tone Multi-Frequency (DTMF) Transmitters and Receivers Part 3: Receivershadiranji4No ratings yet
- Service Manual DynaDrive 022 2002Document19 pagesService Manual DynaDrive 022 2002Samael Perez Luna75% (4)
- PRD Doc Epr 7555-00001 Sen Ain V2Document5 pagesPRD Doc Epr 7555-00001 Sen Ain V2Gabriel Marcos Zoratti RucciNo ratings yet
- Energies: Harmonic Mitigation Using Passive Harmonic Filters: Case Study in A Steel Mill Power SystemDocument16 pagesEnergies: Harmonic Mitigation Using Passive Harmonic Filters: Case Study in A Steel Mill Power SystemNelson ParijósNo ratings yet
- FH-P6600R - P6600 (CRT2502)Document116 pagesFH-P6600R - P6600 (CRT2502)Jory2005No ratings yet
- Digital Image Processing: Image Enhancement: Filtering in The Frequency DomainDocument81 pagesDigital Image Processing: Image Enhancement: Filtering in The Frequency DomainAseem SharmaNo ratings yet
- Häkan+Rörvall +harmonic+filtersDocument43 pagesHäkan+Rörvall +harmonic+filtersrezaNo ratings yet
- 6RA80 Fault Diagnostics enDocument78 pages6RA80 Fault Diagnostics enRavindra Angal100% (2)
- Analog and RF Filters Design Manual:: A Filter Design Guide by and For WMU StudentsDocument42 pagesAnalog and RF Filters Design Manual:: A Filter Design Guide by and For WMU StudentsThevesteNo ratings yet
- IT Ar - 2002Document102 pagesIT Ar - 2002Jose VazNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 12Document42 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 12Tomás BurónNo ratings yet
- 5051 AppDocument37 pages5051 AppawemetalNo ratings yet
- Estimation of Arterial Stiffness by Using PPG Signal: A ReviewDocument4 pagesEstimation of Arterial Stiffness by Using PPG Signal: A ReviewseventhsensegroupNo ratings yet
- Frequency DoublerDocument4 pagesFrequency DoublerprakashroutNo ratings yet
- Maximum Power Transfer in DC CircuitsDocument68 pagesMaximum Power Transfer in DC CircuitsRana Zeeshan AfzalNo ratings yet
- Switching Power Supply Design With The PIC16F785: ElectricalDocument22 pagesSwitching Power Supply Design With The PIC16F785: Electricalyogendra.shethNo ratings yet
- Electronic Measurements & Instrumentation 3 PDFDocument17 pagesElectronic Measurements & Instrumentation 3 PDFdenaiNo ratings yet
- Blues Crusher SchematicDocument28 pagesBlues Crusher Schematiczeus maxNo ratings yet
- Handout No. 11 (Capacitance II) by Odon M. Sanchez C. (Spring Semester 2017)Document4 pagesHandout No. 11 (Capacitance II) by Odon M. Sanchez C. (Spring Semester 2017)AMC PureNo ratings yet
- TA2041 Four Channel Class-T Digital Audio Amplifier Using Digital Power Processing (DPP) TechnologyDocument18 pagesTA2041 Four Channel Class-T Digital Audio Amplifier Using Digital Power Processing (DPP) TechnologyvetchboyNo ratings yet
- Tuning Manual STR-101 - en - V1L PDFDocument20 pagesTuning Manual STR-101 - en - V1L PDFAnonymous A2HIlfCgALNo ratings yet
- Ultra Narrow Band Modulation MethodsDocument14 pagesUltra Narrow Band Modulation MethodsAhmet SeçenNo ratings yet