You might also like
- PI500A Series Basic Frequency Inverter User Manual: 1. ForewordDocument16 pagesPI500A Series Basic Frequency Inverter User Manual: 1. ForewordOdali BatistaNo ratings yet
- Datasheet TachogeneratorDocument4 pagesDatasheet TachogeneratorNurulHidayatNo ratings yet
- Golink Temperature Controller Fy SeriesDocument2 pagesGolink Temperature Controller Fy SeriesJulio OchoaNo ratings yet
- Communication All Cables PLC Pinout (Pinagem de Todos Os Cabos de Comunicação PLC)Document3 pagesCommunication All Cables PLC Pinout (Pinagem de Todos Os Cabos de Comunicação PLC)Jaziel CabralNo ratings yet
- DSE335 Operators ManualDocument2 pagesDSE335 Operators ManualArc HieNo ratings yet
- RISH Relay Manual Covers Voltage and Current ProtectionDocument68 pagesRISH Relay Manual Covers Voltage and Current ProtectionNguyễn Đức LâmNo ratings yet
- ATE8 Series: Instruction ManualDocument1 pageATE8 Series: Instruction Manualyanier martinez100% (1)
- P-Series VFD: New Firmware Makes Setup A SnapDocument5 pagesP-Series VFD: New Firmware Makes Setup A SnapConde Garcia CalderonNo ratings yet
- L011199 - PRONET-E Series Users Manual - V2.11Document198 pagesL011199 - PRONET-E Series Users Manual - V2.11rocksodia22No ratings yet
- Entrelec Single Function Timers PDFDocument105 pagesEntrelec Single Function Timers PDFembasianNo ratings yet
- 69-206 Nte29Document2 pages69-206 Nte29Ulises XutucNo ratings yet
- SMD Type Mosfet: P-Channel 2SJ302-ZJDocument5 pagesSMD Type Mosfet: P-Channel 2SJ302-ZJJoséAntonioGonzálezRamírez100% (1)
- Flyback Design Calculation FairchildDocument7 pagesFlyback Design Calculation FairchildrafialanNo ratings yet
- Operation Manual of Aob29 Series Digital Voltmeter&Ammeter: Chapter 1. General InstructionDocument2 pagesOperation Manual of Aob29 Series Digital Voltmeter&Ammeter: Chapter 1. General InstructionricardoNo ratings yet
- FTA1000 Submittal With ATS (125 HP +)Document15 pagesFTA1000 Submittal With ATS (125 HP +)Arley Naranjo Zulets100% (1)
- A F700 PID ControlDocument8 pagesA F700 PID ControlPham LongNo ratings yet
- Airbus485 Atlas Copco Electronikon 4Document1 pageAirbus485 Atlas Copco Electronikon 4Setiadi DennyNo ratings yet
- Service Manual Develop 1502 - D 1801 - D 2350 - Minolta EP1054Document281 pagesService Manual Develop 1502 - D 1801 - D 2350 - Minolta EP1054foxtrotalpha17100% (1)
- Digital Temperature Controller Operation ManualDocument47 pagesDigital Temperature Controller Operation ManualMADS LABNo ratings yet
- Riello G3X Owner ManualDocument16 pagesRiello G3X Owner ManualKonstantaras YiannisNo ratings yet
- Tamawaga ts5214Document2 pagesTamawaga ts5214LUISNo ratings yet
- Alto A200.2 Power Amp Service ManualDocument25 pagesAlto A200.2 Power Amp Service ManualmundomusicalmeriaNo ratings yet
- Elitech STC 8080a ManualDocument2 pagesElitech STC 8080a ManualJulio Cesar Paredes100% (1)
- HCD VX777Document84 pagesHCD VX777Sudesh Indika Kodithuwakku100% (2)
- EZM-9930 en MDocument48 pagesEZM-9930 en MFawzi AlzubairyNo ratings yet
- 2M210 M1 PDFDocument2 pages2M210 M1 PDFYakov ZinovievNo ratings yet
- Ducati Energia-Capacitors PDFDocument68 pagesDucati Energia-Capacitors PDFVikaas JainNo ratings yet
- Gu320a PDFDocument4 pagesGu320a PDFbambangNo ratings yet
- GA-G41MT-S2 Motherboard Diagram and SpecsDocument33 pagesGA-G41MT-S2 Motherboard Diagram and SpecsĐình CườngNo ratings yet
- User Manual Cp1e PDFDocument326 pagesUser Manual Cp1e PDFBagus Dharmawan HadiNo ratings yet
- DCR Web PDFDocument4 pagesDCR Web PDFMahmoud AyadNo ratings yet
- SR4 ControladorDocument2 pagesSR4 ControladorErick Gabriel Chiroque SilopúNo ratings yet
- Aj Power Ats Panels Handbook-En-rev3Document44 pagesAj Power Ats Panels Handbook-En-rev3Fernando QuisberthNo ratings yet
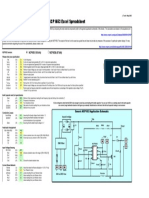
- Ncp1653 Excel Spreadsheet: Ncp1653 (100 KHZ) Ncp1653A (67 KHZ)Document1 pageNcp1653 Excel Spreadsheet: Ncp1653 (100 KHZ) Ncp1653A (67 KHZ)Manoj RoyNo ratings yet
- BLR CXD Short ManualDocument4 pagesBLR CXD Short ManualRnDES1 CML100% (1)
- Digital Output Module SM 322 DO 16 X AC 120/230 V/1 A (6ES7322-1FH00-0AA0)Document4 pagesDigital Output Module SM 322 DO 16 X AC 120/230 V/1 A (6ES7322-1FH00-0AA0)Fabio CavalheiroNo ratings yet
- ADT 1000 ING 2228 - B - AnDocument52 pagesADT 1000 ING 2228 - B - AnGladyz RiveraNo ratings yet
- 74HC373Document5 pages74HC373aasadadNo ratings yet
- Technics SU VX500Document26 pagesTechnics SU VX500Catalin JipescuNo ratings yet
- 1SDA063018R1 t7s 1600 pr231 P Ls I in 1600a 4p F F MDocument3 pages1SDA063018R1 t7s 1600 pr231 P Ls I in 1600a 4p F F MGaston PaezNo ratings yet
- Atsel VFD Datasheet FD100 SeriesDocument2 pagesAtsel VFD Datasheet FD100 SeriesDhananjay LimayeNo ratings yet
- Sispm1: LEL15G604 - PreliminaryDocument9 pagesSispm1: LEL15G604 - Preliminarymohammad100% (1)
- Service Manual: COLT 130G COLT 150GDocument24 pagesService Manual: COLT 130G COLT 150GIon Andrei100% (1)
- InteliCharger 65 - 24 AF DatasheetDocument3 pagesInteliCharger 65 - 24 AF Datasheetjean sanchezNo ratings yet
- TPD4134KDocument24 pagesTPD4134KMolnar LeventeNo ratings yet
- Installation and Maintenance: This Manual Is To Be Given To The End UserDocument12 pagesInstallation and Maintenance: This Manual Is To Be Given To The End UserHoang GiangNo ratings yet
- SLC 7015Document1 pageSLC 7015Дмитрий КопышевNo ratings yet
- Portable induction heating machine manualDocument5 pagesPortable induction heating machine manualxreader0No ratings yet
- PT380 OP-138-V02 - Instruction - ManualDocument3 pagesPT380 OP-138-V02 - Instruction - ManualVIJAY KAGADENo ratings yet
- AV Receiver Service ManualDocument125 pagesAV Receiver Service ManualRobertas PutinasNo ratings yet
- KZ2 Diodo ZennerDocument4 pagesKZ2 Diodo ZennerADSPPANo ratings yet
- 915Document9 pages915Jorge CotzomiNo ratings yet
- Condensing Unit Vertical Discharge 60 HZ R410A: 36KBTU Model Has A Different GrillDocument1 pageCondensing Unit Vertical Discharge 60 HZ R410A: 36KBTU Model Has A Different GrilljuanNo ratings yet
- Easy Weld MIG NB-500D ManualDocument20 pagesEasy Weld MIG NB-500D ManualDavy R.K.No ratings yet
- Introduction Features: Ultra Fast High PSRR Low Noise CMOS Voltage RegulatorDocument11 pagesIntroduction Features: Ultra Fast High PSRR Low Noise CMOS Voltage RegulatorkalanghoNo ratings yet
- Manual PFCL - 01i PDFDocument32 pagesManual PFCL - 01i PDFAnonymous uw1GPbmen5100% (1)
- YL620-A Setup TableDocument8 pagesYL620-A Setup TableJuan Gomez100% (1)
- Quick SetupDocument15 pagesQuick SetupIngeniería AplicacionesNo ratings yet
- DNA Microarrays: DR Divya GuptaDocument33 pagesDNA Microarrays: DR Divya GuptaRuchi SharmaNo ratings yet
- Current CalendarDocument393 pagesCurrent CalendarAmar BenAmarNo ratings yet
- Behavior of RC Shallow and Deep Beams WiDocument26 pagesBehavior of RC Shallow and Deep Beams WiSebastião SimãoNo ratings yet
- 17fin8593 C Us NCR Selfserv 26 DsDocument2 pages17fin8593 C Us NCR Selfserv 26 DsJose MarcosNo ratings yet
- They Are Product, Price, Placement and PromotionDocument2 pagesThey Are Product, Price, Placement and PromotionVy HoàngNo ratings yet
- Commissioning FPFH SettingDocument6 pagesCommissioning FPFH SettingYulius IrawanNo ratings yet
- Kermann Led: Exproof Easylight Z1Document3 pagesKermann Led: Exproof Easylight Z1Abdulaziz AlrawiNo ratings yet
- 1-) 32 M Reactor Unit: Mr. Şahin Kaplan Polyester Polyol FacilityDocument14 pages1-) 32 M Reactor Unit: Mr. Şahin Kaplan Polyester Polyol FacilitySema TaranacıNo ratings yet
- qf001 - Welocalize Supplier Mutual Nda - 2018-Signed PDFDocument9 pagesqf001 - Welocalize Supplier Mutual Nda - 2018-Signed PDFapaci femoNo ratings yet
- Control Systems GEDocument482 pagesControl Systems GECarlos ACNo ratings yet
- GATE 2004 - Question Paper TF: Textile Engineering and Fiber ScienceDocument29 pagesGATE 2004 - Question Paper TF: Textile Engineering and Fiber ScienceChandra Deep MishraNo ratings yet
- VCS Test01Document27 pagesVCS Test01GyanNo ratings yet
- List of Technical Documents: IRB Paint Robots TR-500 / TR-5000Document16 pagesList of Technical Documents: IRB Paint Robots TR-500 / TR-5000Weberth TeixeiraNo ratings yet
- Vasos Amortiguadores - Sedical PDFDocument1 pageVasos Amortiguadores - Sedical PDFLuis DomdNo ratings yet
- eGr13OM BioResoBookDocument137 pageseGr13OM BioResoBookJanath AnthonyNo ratings yet
- ) Perational Vlaintena, Nce Manual: I UGRK SeriesDocument22 pages) Perational Vlaintena, Nce Manual: I UGRK Seriessharan kommiNo ratings yet
- Chapter 1-3Document9 pagesChapter 1-3jhamaymaNo ratings yet
- Acer LCD x193hq Sm080904v1 Model Id Ra19waanuDocument36 pagesAcer LCD x193hq Sm080904v1 Model Id Ra19waanuFrancis Gilbey Joson ArnaizNo ratings yet
- CB Certificate - CodeDocument668 pagesCB Certificate - CodeRosy SeafoodNo ratings yet
- IL6 AdvtDocument9 pagesIL6 AdvtManoj Kumar100% (1)
- IEEE Guide For Batteries For Uninterruptible Power Supply SystemsDocument73 pagesIEEE Guide For Batteries For Uninterruptible Power Supply Systemsفريد قادريNo ratings yet
- F 09420010120134020 PP T 07Document19 pagesF 09420010120134020 PP T 07Stevia TjioeNo ratings yet
- Nomothetic Vs IdiographicDocument9 pagesNomothetic Vs IdiographicBhupesh ManoharanNo ratings yet
- Digital Energy GT Series: User ManualDocument20 pagesDigital Energy GT Series: User ManualWilton AlvesNo ratings yet
- Lagnas CharacterDocument14 pagesLagnas CharactertechkasambaNo ratings yet
- Road of The Beast Combo DisciplinsDocument2 pagesRoad of The Beast Combo DisciplinsMiha DuhNo ratings yet
- Care Sheet - Halloween CrabsDocument2 pagesCare Sheet - Halloween CrabsJohn GamesbyNo ratings yet
- Sd0001e0 2.0 Con Taratura 957Document37 pagesSd0001e0 2.0 Con Taratura 957JayRellvic Guy-ab0% (1)
- Cc-5 SQL TableDocument5 pagesCc-5 SQL TableK.D. computerNo ratings yet
- INGLES TECNICO IV (En Ambas Caras)Document45 pagesINGLES TECNICO IV (En Ambas Caras)ESGUAR INSTRUCTORESNo ratings yet