You might also like
- Anaesthesia For Robotic SurgeryDocument5 pagesAnaesthesia For Robotic Surgerysangamitraachu100% (1)
- The SAGES Manual of Robotic SurgeryFrom EverandThe SAGES Manual of Robotic SurgeryAnkit D. PatelNo ratings yet
- Telerobotic Surgery:: The Need of FutureDocument53 pagesTelerobotic Surgery:: The Need of FutureBulent InanNo ratings yet
- Do Costs of Robotic Surgery Matter PDFDocument12 pagesDo Costs of Robotic Surgery Matter PDFgocosma100% (1)
- Robotic Assisted LaparosDocument5 pagesRobotic Assisted LaparosInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Robotic Systems in Spine Surgery: Spinal Cerrahide Robotik Sistemlerin KullanılmasıDocument7 pagesRobotic Systems in Spine Surgery: Spinal Cerrahide Robotik Sistemlerin KullanılmasıcogajoNo ratings yet
- Robotic Surgery DoxDocument32 pagesRobotic Surgery DoxSravya ReddipalliNo ratings yet
- Robotic Surgery For Thoracic SurgeryDocument7 pagesRobotic Surgery For Thoracic Surgeryrbatjun576No ratings yet
- Millers Anesthesia - Sixth Edition - Chapter 66 - Anesthesia For Robotic Surgery - 233Document44 pagesMillers Anesthesia - Sixth Edition - Chapter 66 - Anesthesia For Robotic Surgery - 233Adriana VickNo ratings yet
- Robotics in General Surgery: James Wall, MD, Venita Chandra, MD and Thomas Krummel, MDDocument18 pagesRobotics in General Surgery: James Wall, MD, Venita Chandra, MD and Thomas Krummel, MDRizwan AhmedNo ratings yet
- Hospital Management: Robotic Assistant SurgeryDocument13 pagesHospital Management: Robotic Assistant SurgeryRaj saranyaNo ratings yet
- Robotic Lung Surgery DetailsDocument12 pagesRobotic Lung Surgery DetailsRoberto Cjuno ChaccaNo ratings yet
- Robotic SurgeryDocument12 pagesRobotic SurgeryPhani Venkata SaiNo ratings yet
- Liu - Ijos 2017Document11 pagesLiu - Ijos 2017Rohan BhagatNo ratings yet
- Robotic Surgery ReportDocument22 pagesRobotic Surgery ReportsayyanNo ratings yet
- Robotic Surgery Seminar ReportDocument16 pagesRobotic Surgery Seminar ReportWendy CannonNo ratings yet
- REMOTE SURGERY: TELESURGERY OVER LONG DISTANCESDocument6 pagesREMOTE SURGERY: TELESURGERY OVER LONG DISTANCESramananbmeNo ratings yet
- Robo SurgeryDocument9 pagesRobo Surgeryrwong1231No ratings yet
- Robotic SurgeryDocument33 pagesRobotic SurgeryGauri Priya RohithNo ratings yet
- Manejo Del Paciente Sometido A Cxirugia Toracica Minima Invasiva Toracoscopica o RoboticaDocument11 pagesManejo Del Paciente Sometido A Cxirugia Toracica Minima Invasiva Toracoscopica o RoboticaAnselmo LucasNo ratings yet
- 01 Robotic Surgery and TelesurgeryDocument7 pages01 Robotic Surgery and Telesurgerykrishnachaitanya46No ratings yet
- Continuum Robots For Medical Applications: A SurveyDocument20 pagesContinuum Robots For Medical Applications: A SurveyErwin PerdanaNo ratings yet
- Robot Assisted Surgery1Document18 pagesRobot Assisted Surgery1Mahesh JoshiNo ratings yet
- Icu 58 297 PDFDocument2 pagesIcu 58 297 PDFNeil GriggNo ratings yet
- Robotic SurgeryDocument21 pagesRobotic SurgerysayyanNo ratings yet
- Jara 2020Document8 pagesJara 2020Ágoston János CsigiNo ratings yet
- RoboticDocument6 pagesRoboticShahid HasanNo ratings yet
- Robotic Lobectomy Right Upper LobectomyDocument14 pagesRobotic Lobectomy Right Upper LobectomyalfonsoNo ratings yet
- Robotic Tools For Minimally Invasive Urologic SurgeryDocument17 pagesRobotic Tools For Minimally Invasive Urologic SurgeryAnoop CadlordNo ratings yet
- Anaesthesia in Robotic SurgeryDocument32 pagesAnaesthesia in Robotic SurgeryRaguNo ratings yet
- Robotic Surgery A Current Perspective: ObjectiveDocument7 pagesRobotic Surgery A Current Perspective: ObjectiveirismgallNo ratings yet
- Robotics in Colorectal Surgery: Telemonitoring and TeleroboticsDocument10 pagesRobotics in Colorectal Surgery: Telemonitoring and TeleroboticsprivedNo ratings yet
- Robotic Surgery in Otolaryngology and Head and Neck Surgery: A ReviewDocument12 pagesRobotic Surgery in Otolaryngology and Head and Neck Surgery: A ReviewErick CorputtyNo ratings yet
- Da VinciDocument6 pagesDa VinciCiofoaia CiprianNo ratings yet
- Array of Robots Augmenting The Kinematics of Endocavitary SurgeryDocument9 pagesArray of Robots Augmenting The Kinematics of Endocavitary SurgeryAnjireddy ThatiparthyNo ratings yet
- Robot SurgeryDocument17 pagesRobot SurgerymanishawaliaNo ratings yet
- A Hand-Held Non-Robotic Surgical Tool With A Wrist and An ElbowDocument9 pagesA Hand-Held Non-Robotic Surgical Tool With A Wrist and An ElbowwangyanhiterNo ratings yet
- A Case Study On The Use of Technology in Medicine: Robotic SurgeryDocument11 pagesA Case Study On The Use of Technology in Medicine: Robotic SurgeryJohn Mark EmataNo ratings yet
- Objective:: Other SectionsDocument15 pagesObjective:: Other SectionsNikita NaikNo ratings yet
- Musha Hand IIDocument13 pagesMusha Hand IImohamedNo ratings yet
- Telechirurgie PDFDocument5 pagesTelechirurgie PDFAlexandraNo ratings yet
- Tele Chi Rur GieDocument5 pagesTele Chi Rur GieAlexandraNo ratings yet
- Robotic Surgery Systems and Future DevelopmentsDocument4 pagesRobotic Surgery Systems and Future DevelopmentsSuyambu LingamNo ratings yet
- Surgical RoboticsreviewDocument8 pagesSurgical RoboticsreviewMangesh PachkawadeNo ratings yet
- Robotic SurgeryDocument4 pagesRobotic SurgeryJaimin RathodNo ratings yet
- Surgical Techniques Da Vinci MyomectomyDocument6 pagesSurgical Techniques Da Vinci MyomectomyConsultorio Ginecología y ObstetriciaNo ratings yet
- A Master– Slave Integrated Surgical Robot With Active Motion Transformation Using Wrist AxisDocument11 pagesA Master– Slave Integrated Surgical Robot With Active Motion Transformation Using Wrist AxiswangyanhiterNo ratings yet
- The ZEUS Robotic System: Experimental and Clinical ApplicationsDocument11 pagesThe ZEUS Robotic System: Experimental and Clinical ApplicationsademargcjuniorNo ratings yet
- Robotic Surgery History and SystemsDocument28 pagesRobotic Surgery History and SystemsLidhi DileepNo ratings yet
- Applications of Robotics For Laryngeal SurgeryDocument11 pagesApplications of Robotics For Laryngeal SurgerySanNo ratings yet
- Robotics in SurgeryDocument9 pagesRobotics in SurgeryPriyansh AggarwalNo ratings yet
- Robotic SurgeryDocument11 pagesRobotic SurgerySam AlatawiNo ratings yet
- Robotic SurgeryDocument22 pagesRobotic SurgeryRavi BabuNo ratings yet
- Authors: T.Ammi Reddy K.Bhanu T.Uma RaniDocument8 pagesAuthors: T.Ammi Reddy K.Bhanu T.Uma RaniSrinivas HeroNo ratings yet
- Robotic SurgeryDocument13 pagesRobotic SurgeryvenuprasadNo ratings yet
- Surgical RobotsDocument48 pagesSurgical RobotsRohanNo ratings yet
- Evolutions and Future Directions of Surgical Robot PDFDocument8 pagesEvolutions and Future Directions of Surgical Robot PDFSergio Andres Serrano JoyaNo ratings yet
- 1.seminar Report RoboDocument9 pages1.seminar Report RoboChetan Kumar Gowda100% (1)
- Robotic SurgeryDocument30 pagesRobotic SurgeryVijay MgNo ratings yet
- Laser DCRDocument13 pagesLaser DCRAkansha TewariNo ratings yet
- Diagnostic DCRDocument23 pagesDiagnostic DCRAkansha TewariNo ratings yet
- Role of Circumferential Subannular Tympanoplasty in Anterior and Subtotal PerforationsDocument5 pagesRole of Circumferential Subannular Tympanoplasty in Anterior and Subtotal PerforationsAkansha TewariNo ratings yet
- COVID 19 Tracheostomy Guidance 18 March 2020Document5 pagesCOVID 19 Tracheostomy Guidance 18 March 2020José PadillaNo ratings yet
- Met Son 1999Document5 pagesMet Son 1999Akansha TewariNo ratings yet
- Sphenopalatine Artery - SPA - LigationDocument5 pagesSphenopalatine Artery - SPA - LigationAkansha TewariNo ratings yet
- Rajiv Gandhi University Dissertation Topics in NursingDocument7 pagesRajiv Gandhi University Dissertation Topics in NursingBuyPsychologyPapersTulsaNo ratings yet
- Obs Gynae Dams Notes 2018 PDFDocument398 pagesObs Gynae Dams Notes 2018 PDFshravaniNo ratings yet
- Coronavirus Disease (COVID-19) Pandemic: EditorialDocument3 pagesCoronavirus Disease (COVID-19) Pandemic: EditorialBeb HaqNo ratings yet
- Sindrom AlagileDocument8 pagesSindrom AlagilewenyinriantoNo ratings yet
- Trichology PDFDocument10 pagesTrichology PDFDr-Arun Chugh33% (3)
- SGOP cervical cancer guidelinesDocument93 pagesSGOP cervical cancer guidelinesjojolilimomo100% (2)
- Yasmeen FatimaDocument11 pagesYasmeen FatimaAdil49No ratings yet
- 182 P - Leech Therapy - An Introduction - Matt IsaacDocument182 pages182 P - Leech Therapy - An Introduction - Matt IsaacKatyi Gyula100% (1)
- Poison Management HandbookDocument238 pagesPoison Management Handbookanon_32392391No ratings yet
- Anti-Obesity MedicationsDocument33 pagesAnti-Obesity MedicationsJorge Luis Alva AlonsoNo ratings yet
- Medical Abbreviations in MsiaDocument1 pageMedical Abbreviations in MsiaEvonne TanNo ratings yet
- Minimally Invasive Face-Lifting: S-Lift and S-Plus Lift RhytidectomiesDocument11 pagesMinimally Invasive Face-Lifting: S-Lift and S-Plus Lift RhytidectomiesAditi SharmaNo ratings yet
- Group 3 Cardiovascular ProblemDocument52 pagesGroup 3 Cardiovascular ProblemWARREN WILLIAM PERAN100% (3)
- Live music reduces pediatric distressDocument5 pagesLive music reduces pediatric distressandreaNo ratings yet
- Descriptive Study On Malignant Otitis Externa in Diabetic Patients at A Tertiary Care Hospital at MadurandhagamDocument5 pagesDescriptive Study On Malignant Otitis Externa in Diabetic Patients at A Tertiary Care Hospital at MadurandhagamAditya HendraNo ratings yet
- Leann Li ResumeDocument2 pagesLeann Li Resumeapi-660140781No ratings yet
- GTN Ointment Relieves Chronic Anal FissuresDocument8 pagesGTN Ointment Relieves Chronic Anal FissuresAndrew SuryaNo ratings yet
- Draping The Client For DeliveryDocument4 pagesDraping The Client For DeliveryKristil Chavez100% (1)
- Cmca Lec Prelim ReviewerDocument26 pagesCmca Lec Prelim ReviewerCrystal MiranaNo ratings yet
- ORTHODONTICS CLASSIFICATION REVISITEDDocument7 pagesORTHODONTICS CLASSIFICATION REVISITEDDharampal SinghNo ratings yet
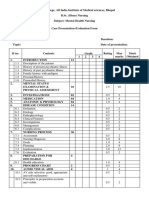
- Evaluation Form MSCDocument5 pagesEvaluation Form MSCvikash kumarNo ratings yet
- Odds Ratio Calculations for Disease ExposureDocument4 pagesOdds Ratio Calculations for Disease ExposureJoshMatthewsNo ratings yet
- Emergency Assistance PlanDocument4 pagesEmergency Assistance PlanTerence100% (1)
- Microanatomy of GIT 1Document64 pagesMicroanatomy of GIT 1MEHJABINHAQNo ratings yet
- Cosmetic Surgery An Interdisciplinary ApproachDocument1,004 pagesCosmetic Surgery An Interdisciplinary ApproachDaniel FilizzolaNo ratings yet
- 5 - 481316 - HematologyDocument1 page5 - 481316 - HematologyChristopher MolinaNo ratings yet
- Pediatric Nursing Course OutlineDocument6 pagesPediatric Nursing Course OutlineDaryl Adrian RecaidoNo ratings yet
- Heart Failure NCPDocument9 pagesHeart Failure NCPMiriam EstradaNo ratings yet
- Home remedies for common ailmentsDocument34 pagesHome remedies for common ailmentsBrigitte Nolan100% (3)
- Case Study On Acute Gastroenteritis and Acid Peptic-2Document15 pagesCase Study On Acute Gastroenteritis and Acid Peptic-2FHAMITHANo ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityFrom EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityRating: 4.5 out of 5 stars4.5/5 (115)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- Modeling, Dynamics, and Control of Electrified VehiclesFrom EverandModeling, Dynamics, and Control of Electrified VehiclesRating: 5 out of 5 stars5/5 (1)
- Learning Robotics, with Robotics, by Robotics: Educational RoboticsFrom EverandLearning Robotics, with Robotics, by Robotics: Educational RoboticsNo ratings yet
- Visions Of Technology: A Century Of Vital Debate About Machines Systems AFrom EverandVisions Of Technology: A Century Of Vital Debate About Machines Systems ARating: 4 out of 5 stars4/5 (9)