You might also like
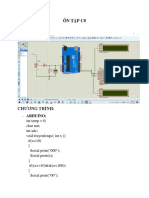
- ÔN TẬP CDocument16 pagesÔN TẬP CXUAN MINH DINHNo ratings yet
- Control Borescope Motor and Camera DegreeDocument8 pagesControl Borescope Motor and Camera Degreejoni Mart SitioNo ratings yet
- Apache Thrift: Thrift - Exe - R - Gen Java Hello - ThriftDocument6 pagesApache Thrift: Thrift - Exe - R - Gen Java Hello - ThriftWatsh RajneeshNo ratings yet
- Códigos de Arduino y Processing para SismografoDocument4 pagesCódigos de Arduino y Processing para SismografoMario Leonel Torres MartinezNo ratings yet
- Analisa Program Detector TeganganDocument8 pagesAnalisa Program Detector Teganganblimbing rotor1No ratings yet
- Job Sheet P2 - Antarmuka Arduino Dan ProcessingDocument11 pagesJob Sheet P2 - Antarmuka Arduino Dan ProcessingRifky MuhamadNo ratings yet
- Sorce Code Auto Detect DeviceDocument4 pagesSorce Code Auto Detect DeviceAlan TeaNo ratings yet
- Exp 1Document5 pagesExp 1Brisc BiancaNo ratings yet
- Programacion NodemcuDocument12 pagesProgramacion NodemcuJoséPérezCamposNo ratings yet
- Food Block RemoteDocument8 pagesFood Block Remoteapi-360229604No ratings yet
- MC9246-Visual Programming LabDocument56 pagesMC9246-Visual Programming LabannamyemNo ratings yet
- Java Tutorial (Netbeans) - Control LED with ArduinoDocument22 pagesJava Tutorial (Netbeans) - Control LED with ArduinoALEJANDRO MORENO ARTUNDUAGANo ratings yet
- Membaca Sensor Intensitas CahayaDocument15 pagesMembaca Sensor Intensitas CahayaR PermanaNo ratings yet
- Processing Code CNC For Arduino Meg2560 or UnoR3Document6 pagesProcessing Code CNC For Arduino Meg2560 or UnoR3Tushar PatilNo ratings yet
- EspDocument8 pagesEspJestoni RapalNo ratings yet
- C303.Chương4 TH9Document3 pagesC303.Chương4 TH9Trần Ngọc PhongNo ratings yet
- Module Arduino MQTT Grafik-1Document9 pagesModule Arduino MQTT Grafik-1Andika SaputraNo ratings yet
- Lab ManualDocument23 pagesLab ManualGeethu MohanNo ratings yet
- Program To Make An Actuator High and Low Alternatively With A Delay of 1000 MillisecondsDocument6 pagesProgram To Make An Actuator High and Low Alternatively With A Delay of 1000 MillisecondspragyaNo ratings yet
- 1.RMI PGM To Calculate Factorial of A Number: Program Client ProgramDocument23 pages1.RMI PGM To Calculate Factorial of A Number: Program Client ProgramGeethu MohanNo ratings yet
- 5implementasi RPC JavaDocument5 pages5implementasi RPC JavaMboN TeTeWNo ratings yet
- Record Programs-1Document23 pagesRecord Programs-1Chandrika KumariNo ratings yet
- Lab7 - CR182 - Dutca AlexandruDocument14 pagesLab7 - CR182 - Dutca AlexandruDutca AlexandruNo ratings yet
- Tutorial Java ArduinoDocument22 pagesTutorial Java Arduinodarlin jhoel teran condorNo ratings yet
- Using Using Using Using Using Using Using Using Using Using Using Namespace Public Partial ClassDocument6 pagesUsing Using Using Using Using Using Using Using Using Using Using Namespace Public Partial ClassDinh TranNo ratings yet
- Determine IP Class ProgramDocument12 pagesDetermine IP Class ProgramDSAO AmravatiNo ratings yet
- Control Circles Movement with ArduinoDocument5 pagesControl Circles Movement with ArduinoRegidor PetilunaNo ratings yet
- Iot External FinalDocument24 pagesIot External FinalAbdul MuqtadirNo ratings yet
- DS LabDocument16 pagesDS LabAmit Pandey50% (4)
- Lapres 3Document13 pagesLapres 3Dicky IhzaNo ratings yet
- CnlabDocument33 pagesCnlabNiveditha SujaNo ratings yet
- MQTT ExampleDocument5 pagesMQTT ExampleMathgrts Ilmi великий хакерNo ratings yet
- Experiment No.3 Two PhaseDocument10 pagesExperiment No.3 Two Phasepavan nirmalNo ratings yet
- TD5 Jerimy MoreiraDocument6 pagesTD5 Jerimy Moreirajeremy isaac Moreira AlcivarNo ratings yet
- 1.create Chat Application Using Either TCP or UDP Protocol.: Server CodeDocument10 pages1.create Chat Application Using Either TCP or UDP Protocol.: Server CodeKevin VaghasiyaNo ratings yet
- ESP8266 Masina3PWM - InoDocument10 pagesESP8266 Masina3PWM - InomarinpopaNo ratings yet
- 19P220 Lab - 3Document10 pages19P220 Lab - 3MaheshwaranNo ratings yet
- IMPLEMENTATION OF ADDRESS RESOLUTION PROTOCOL (ARP) AND ECHO PROTOCOLDocument31 pagesIMPLEMENTATION OF ADDRESS RESOLUTION PROTOCOL (ARP) AND ECHO PROTOCOLMary JansiNo ratings yet
- Last GpsDocument9 pagesLast GpsThinh HoangNo ratings yet
- UDP Client Server CommunicationDocument6 pagesUDP Client Server CommunicationsiverizzieNo ratings yet
- Assignment No.1 1. ObjectiveDocument6 pagesAssignment No.1 1. Objectiveapi-3816734No ratings yet
- Method Overloading Source CodeDocument26 pagesMethod Overloading Source CodeMunisekarNo ratings yet
- Zadatak I.: Lastcall Currentcall TimelineDocument5 pagesZadatak I.: Lastcall Currentcall Timelinepatrasche_No ratings yet
- Manual ArduinoDocument15 pagesManual ArduinoBalachandraNo ratings yet
- All CodesDocument28 pagesAll CodeskarrarNo ratings yet
- UntitledDocument47 pagesUntitledShoda IndianoNo ratings yet
- Advanced Java Programming Lab ManualDocument51 pagesAdvanced Java Programming Lab ManualKesava PandianNo ratings yet
- C++ ManualDocument27 pagesC++ ManualAnu RadhaNo ratings yet
- 4.3 Arduino Language ReferenceDocument77 pages4.3 Arduino Language ReferenceArmando M. Díaz AlvaradoNo ratings yet
- xsaasdDocument6 pagesxsaasdwalidjnidi59No ratings yet
- Translasi Skala Dan RotasiDocument9 pagesTranslasi Skala Dan RotasiGALANG MUHAMMAD DIMAS SATRIONo ratings yet
- NCS 751 Lab ManualDocument16 pagesNCS 751 Lab ManualT.Saravanan SaravananNo ratings yet
- Lab-Fat: 19BCT0015 CH - Tharun TejDocument11 pagesLab-Fat: 19BCT0015 CH - Tharun TejTharun TejNo ratings yet
- AnkitSingh 51Document11 pagesAnkitSingh 510211cse089No ratings yet
- PAM Lab 3 Rotaru DanDocument6 pagesPAM Lab 3 Rotaru DanDanNo ratings yet
- Port Communications Using C#Document5 pagesPort Communications Using C#thomhobieNo ratings yet
- CNS LabDocument52 pagesCNS LabsiddheshNo ratings yet
- Interfacing ARDUINO With C++Document4 pagesInterfacing ARDUINO With C++shivamrockzNo ratings yet
- Difference Between CS, IT & SE DegreesDocument5 pagesDifference Between CS, IT & SE DegreesDaniyal NisarNo ratings yet
- You Receive An "Error 1305: Setup Cannot Read File" Error Message When You Install Office 2003Document4 pagesYou Receive An "Error 1305: Setup Cannot Read File" Error Message When You Install Office 2003Andis HalimNo ratings yet
- Controlling Database Management Systems: Access ControlsDocument6 pagesControlling Database Management Systems: Access ControlsCillian ReevesNo ratings yet
- Bank Management SystemDocument13 pagesBank Management Systemayushtst43No ratings yet
- AI GOAL STACK AND HIERARCHICAL PLANNINGDocument10 pagesAI GOAL STACK AND HIERARCHICAL PLANNING321126510L03 kurmapu dharaneeswar100% (4)
- Product ManualDocument52 pagesProduct ManualAxel MurellerNo ratings yet
- DD1Document5 pagesDD1Perry EnodolomwanyiNo ratings yet
- Augmenting Bacnet With Lorawan Wireless IotDocument6 pagesAugmenting Bacnet With Lorawan Wireless IotTomNo ratings yet
- Tutorials - Check GPU Temperature in Windows 10 Task Manager - Team OS - Your Only Destination To Custom OS !!Document5 pagesTutorials - Check GPU Temperature in Windows 10 Task Manager - Team OS - Your Only Destination To Custom OS !!haimi708-1No ratings yet
- 02 PointersDocument17 pages02 PointersLộcNo ratings yet
- String and array methodsDocument7 pagesString and array methodsHuzaifa AwanNo ratings yet
- Fire Detection Using Image Processing: Bibek ShresthaDocument39 pagesFire Detection Using Image Processing: Bibek Shresthasharad kumarNo ratings yet
- Prod Virusscan Enterprise Storage v1 3 X Release NotesDocument3 pagesProd Virusscan Enterprise Storage v1 3 X Release Notesnlly4uNo ratings yet
- ZYXEL Application-Note PMG1005-T20B 1.0Document22 pagesZYXEL Application-Note PMG1005-T20B 1.0JasonNo ratings yet
- Java Inheritance ExplainedDocument10 pagesJava Inheritance ExplainedSyed Kamran AliNo ratings yet
- STA 101 Module 1 System Integration and ArchitectureDocument10 pagesSTA 101 Module 1 System Integration and ArchitectureRogin Llorico UbamosNo ratings yet
- Balaji SiddaDocument1 pageBalaji SiddaManju GautamNo ratings yet
- ABAP Delta Guide 3146Document551 pagesABAP Delta Guide 3146narendrabhatNo ratings yet
- AV Design Tracking Y2021208Document46 pagesAV Design Tracking Y2021208tuan336No ratings yet
- Guidance Counseling Record Management SystemDocument8 pagesGuidance Counseling Record Management SystemSamir HuseinNo ratings yet
- Coordinator - Ganesh DharDocument17 pagesCoordinator - Ganesh DharsubhamaybiswasNo ratings yet
- Blexr - Full Stack Engineer (React - Next.Node) - 1Document4 pagesBlexr - Full Stack Engineer (React - Next.Node) - 1Josep VidalNo ratings yet
- Congestion Control and Quality of ServiceDocument27 pagesCongestion Control and Quality of ServiceFarhan TariqNo ratings yet
- EECS 452 Digital Signal Processing Lab: Lecture 3: Number RepresentationDocument46 pagesEECS 452 Digital Signal Processing Lab: Lecture 3: Number RepresentationgmsinclairNo ratings yet
- Dry Run 10Document4 pagesDry Run 10anshiNo ratings yet
- AcceleratingU QTP StorageDocument118 pagesAcceleratingU QTP StorageRamzi ben hamidaNo ratings yet
- Outlier Air v3Document10 pagesOutlier Air v3bartosz_marcini7505No ratings yet
- Week 8Document27 pagesWeek 8LeeNo ratings yet
- OOSE Chapter2 NotesDocument13 pagesOOSE Chapter2 NotesPadre BhojNo ratings yet
- SAP HANA Supported Operating SystemsDocument9 pagesSAP HANA Supported Operating SystemsankurbamelNo ratings yet