You might also like
- PIR Motion Sensor AlarmDocument46 pagesPIR Motion Sensor AlarmSyad AlyNo ratings yet
- HW 5Document12 pagesHW 5api-446897780No ratings yet
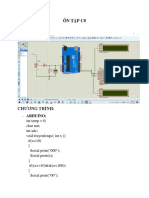
- ÔN TẬP CDocument16 pagesÔN TẬP CXUAN MINH DINHNo ratings yet
- Food Block RemoteDocument8 pagesFood Block Remoteapi-360229604No ratings yet
- ReporteDocument9 pagesReporteRenato Sebastian Rodriguez LlanosNo ratings yet
- Two-pass assembler designDocument13 pagesTwo-pass assembler designPrabhat kumarNo ratings yet
- DAA Ass3Document16 pagesDAA Ass3Hášṅáť ḾálịǩNo ratings yet
- My300 leetcodePDF-StackDocument5 pagesMy300 leetcodePDF-StackSnehaNo ratings yet
- ESP8266 Masina3PWM - InoDocument10 pagesESP8266 Masina3PWM - InomarinpopaNo ratings yet
- Hackerrank NodejsDocument19 pagesHackerrank NodejsSHIVAM SHRIVASTAVA67% (3)
- Part-1 PIR Motion Sensor and Servo CodeDocument15 pagesPart-1 PIR Motion Sensor and Servo CodeM Salman RyanNo ratings yet
- AtrDocument2 pagesAtrnsalichosNo ratings yet
- Last GpsDocument9 pagesLast GpsThinh HoangNo ratings yet
- Lampu Pintar Dengan Pengukuran Daya Listrik Dan Sensor PIRDocument22 pagesLampu Pintar Dengan Pengukuran Daya Listrik Dan Sensor PIRThomas Puri KrishanantoNo ratings yet
- Code LocDocument5 pagesCode LocKa TrầnNo ratings yet
- VS Code GUI InterfaceDocument20 pagesVS Code GUI InterfaceLavissia GreenNo ratings yet
- sim800ldthDocument3 pagessim800ldthMax MinNo ratings yet
- Shadab - DS Lab FileDocument17 pagesShadab - DS Lab FileEdu On PointsNo ratings yet
- C Programming LanguageDocument34 pagesC Programming Languagemohamed ramadanNo ratings yet
- Arduino PWM and FrecuenciaDocument5 pagesArduino PWM and FrecuenciaOscar Caceres ChuraNo ratings yet
- IOT IntroductionDocument23 pagesIOT IntroductionMadhuNo ratings yet
- ADXL345_sensor_I2C_interfaceDocument5 pagesADXL345_sensor_I2C_interfaceavi kishuNo ratings yet
- Program 9: Create A Database Regarding Its Indoor PatientsDocument13 pagesProgram 9: Create A Database Regarding Its Indoor PatientsNeeraj FalwariyaNo ratings yet
- C Lab QuestionsDocument20 pagesC Lab QuestionsBibinMathew100% (9)
- Listing Program ArduinoDocument15 pagesListing Program ArduinoRizky SyahputraNo ratings yet
- UAS Pemrograman - GIOVANI CHRISANTUS - 20F10005Document6 pagesUAS Pemrograman - GIOVANI CHRISANTUS - 20F10005Aldi AdityaNo ratings yet
- Convex Hull: Graph Theory Demonstration: Given A Set of Points, Determine Which Points Lie On The "Outer Perimeter"Document14 pagesConvex Hull: Graph Theory Demonstration: Given A Set of Points, Determine Which Points Lie On The "Outer Perimeter"حمادوش عبد اللطيفNo ratings yet
- ESP CodeDocument6 pagesESP CodeAshwani Dhiman0% (1)
- Sim HTTPDocument4 pagesSim HTTPThinh HoangNo ratings yet
- Java Assisgnment Solution: Q6Document7 pagesJava Assisgnment Solution: Q6Aditya UpadhyayNo ratings yet
- FAF233 Lab1 PostoroncaDumitruDocument21 pagesFAF233 Lab1 PostoroncaDumitrupostoroncadumitruNo ratings yet
- Dynamic Allocation - Test Scores 2Document3 pagesDynamic Allocation - Test Scores 2api-690889230No ratings yet
- phần 4 Các bài tập lập trình mạng các tuầnDocument19 pagesphần 4 Các bài tập lập trình mạng các tuầnVũ Quốc NgọcNo ratings yet
- Integrantes: Rodolfo Peña Olmos Enrique Rodriguez Jimenez Grupo: 2Cm3Document23 pagesIntegrantes: Rodolfo Peña Olmos Enrique Rodriguez Jimenez Grupo: 2Cm3Rodolfo PeñaNo ratings yet
- Generate random numbers for encryption in JavaDocument22 pagesGenerate random numbers for encryption in JavaPrashant Kumar SinghNo ratings yet
- Operator Overloading and Inheritance MCQsDocument140 pagesOperator Overloading and Inheritance MCQsManoj Kumar SinghNo ratings yet
- ทดสอบDocument5 pagesทดสอบธวัชชัย ตรีศูนย์No ratings yet
- מטלת בית 9 - הקצאה דינאמיתDocument5 pagesמטלת בית 9 - הקצאה דינאמיתEvellina YurkovskiyNo ratings yet
- CG ASsignmentDocument20 pagesCG ASsignmentGoyal AdityaNo ratings yet
- Mob Computing LABDocument13 pagesMob Computing LABDinesh SharmaNo ratings yet
- CodeDocument9 pagesCodeMuHammad TaHir HasSanNo ratings yet
- Name: Dhruvil K Kotecha ID No.: 17CP024 Sub. Code: CP-402 Sub. Name: ADT Semester: 7 Year: 2020/21Document30 pagesName: Dhruvil K Kotecha ID No.: 17CP024 Sub. Code: CP-402 Sub. Name: ADT Semester: 7 Year: 2020/21Dhruvil KotechaNo ratings yet
- PIC16F628A GSM SMSDocument6 pagesPIC16F628A GSM SMSSake gtrNo ratings yet
- Control Borescope Motor and Camera DegreeDocument8 pagesControl Borescope Motor and Camera Degreejoni Mart SitioNo ratings yet
- Java MethodsDocument5 pagesJava MethodsMan RunnerNo ratings yet
- CodeDocument28 pagesCodeShubhamNo ratings yet
- ThreadDocument3 pagesThreadMuhammad Yousaf RanaNo ratings yet
- EeeeDocument4 pagesEeeeMouad MefettarNo ratings yet
- SEO-Optimized Title for Server-Client File Transfer Using FIFO PipesDocument20 pagesSEO-Optimized Title for Server-Client File Transfer Using FIFO PipesVijay PohwaniNo ratings yet
- WiproDocument9 pagesWiproDeepthi AtluruNo ratings yet
- Program To Interface GSM Module With 8051 Micro ControllerDocument13 pagesProgram To Interface GSM Module With 8051 Micro ControllerEphrem Melka Negash80% (10)
- Aqsa Lab ManualDocument161 pagesAqsa Lab ManualAqsa TabassumNo ratings yet
- โค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างDocument4 pagesโค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างธวัชชัย ตรีศูนย์No ratings yet
- 12Document48 pages12hpss77No ratings yet
- LabDocument22 pagesLabArooj FatimaNo ratings yet
- Experiment 3: Merge Sort Aim: PseudocodeDocument11 pagesExperiment 3: Merge Sort Aim: PseudocodeiG么RayGNo ratings yet
- Exp1part 2Document12 pagesExp1part 2bangi arfatNo ratings yet
- Code Composer Studio Programs: Cycle - IiDocument18 pagesCode Composer Studio Programs: Cycle - IiGS Naveen KumarNo ratings yet
- Ite3001 - Data Communication and Computer Networks - Winter Semester 2020-21 Slot: L17+L18 Assessment 4 BY-Piyush Sahu 19BIT0038Document11 pagesIte3001 - Data Communication and Computer Networks - Winter Semester 2020-21 Slot: L17+L18 Assessment 4 BY-Piyush Sahu 19BIT0038Piyush SahuNo ratings yet
- NCR HistoryDocument2 pagesNCR HistoryAgam SehgalNo ratings yet
- Hotels Sector Analysis Report: SupplyDocument7 pagesHotels Sector Analysis Report: SupplyArun AhirwarNo ratings yet
- Operation & Safety, Service & Maintenance, & Illustrated Parts Manual SupplementDocument78 pagesOperation & Safety, Service & Maintenance, & Illustrated Parts Manual SupplementNube RentalpatagoniaNo ratings yet
- Union Bank Talking ATM User Manual 3rd Edition EnglishDocument25 pagesUnion Bank Talking ATM User Manual 3rd Edition EnglishtitoNo ratings yet
- Cna Part7Document10 pagesCna Part7AlnZmNo ratings yet
- Acknowledgment For Request For New PAN Card or - and Changes or Correction in PAN Data (881030205408706)Document1 pageAcknowledgment For Request For New PAN Card or - and Changes or Correction in PAN Data (881030205408706)kapilchandanNo ratings yet
- CV: Harini Saladi ViaDocument2 pagesCV: Harini Saladi ViaMosambe.comNo ratings yet
- Installation and Maintenance GuideDocument100 pagesInstallation and Maintenance GuideburnslNo ratings yet
- Power System Operation Control & Restructuring, 1/e: Book Information Sheet Book Information SheetDocument1 pagePower System Operation Control & Restructuring, 1/e: Book Information Sheet Book Information Sheetahtisham shahNo ratings yet
- ICSE 2011 Computer Applications Question PaperDocument4 pagesICSE 2011 Computer Applications Question Paperanislinek15No ratings yet
- Simulationreporttemplate 2007Document14 pagesSimulationreporttemplate 2007Juan Carlos DiazNo ratings yet
- 3-Totally Integrated Automation ChemicalDocument30 pages3-Totally Integrated Automation ChemicalUmesh SNo ratings yet
- Business Process ReengineeringDocument148 pagesBusiness Process ReengineeringProf. R.S.MathurNo ratings yet
- NSE IT Aadhar ExamDocument110 pagesNSE IT Aadhar ExamRajesh R100% (1)
- Deep Sea Electronics PLC: Complex Solutions Made SimpleDocument66 pagesDeep Sea Electronics PLC: Complex Solutions Made SimplepdealersNo ratings yet
- Img 30Document1 pageImg 30Sonam BaghaNo ratings yet
- TourismDocument39 pagesTourismDinesh Vashisth D C50% (6)
- Work Report " Standard Chartered Bank BangladeshDocument8 pagesWork Report " Standard Chartered Bank BangladeshohidrahmanNo ratings yet
- Assignment 1Document3 pagesAssignment 1Raihana AlyaNo ratings yet
- Flow Program Bootcamp IT Consultant PT Indocyber Global TeknologiDocument12 pagesFlow Program Bootcamp IT Consultant PT Indocyber Global TeknologiTaufik RahmanNo ratings yet
- IVMS-4200v2.8.2.2 Release Note - InternalDocument3 pagesIVMS-4200v2.8.2.2 Release Note - InternalnajjaciNo ratings yet
- Door Sensor ProjectDocument6 pagesDoor Sensor ProjectMehmood ul Hassan100% (1)
- Simulating The "First Steps" of A Walking Hexapod Robot: Ing. R. Woering CST 2010.075Document81 pagesSimulating The "First Steps" of A Walking Hexapod Robot: Ing. R. Woering CST 2010.075Alina MirelaNo ratings yet
- HP Color Laserjet Cm2320Nf Multifunction Printer Price: $699.00Document34 pagesHP Color Laserjet Cm2320Nf Multifunction Printer Price: $699.00Matthew JohnsonNo ratings yet
- Math CorrigerDocument1 pageMath CorrigerLeïla PNo ratings yet
- Secure Coding Practices For: White PaperDocument15 pagesSecure Coding Practices For: White Papererica jayasunderaNo ratings yet
- Tugas Grafika Komputer: Kurva C, Dragon, Dan SiepernzkiDocument7 pagesTugas Grafika Komputer: Kurva C, Dragon, Dan Siepernzkibagus_ari_pNo ratings yet
- Jeemain - Ntaonline.in Frontend Web Advancecityintimationslip Admit-CardDocument5 pagesJeemain - Ntaonline.in Frontend Web Advancecityintimationslip Admit-CardParth BhosaleNo ratings yet
- z6 Amplitude ModulationDocument10 pagesz6 Amplitude ModulationtsegayNo ratings yet
- ISO 21434 As A Standardized Framework To Deal With Automotive Cyber SecurityDocument31 pagesISO 21434 As A Standardized Framework To Deal With Automotive Cyber SecurityAjay Deshpande100% (2)