You might also like
- Beyond Today - July /august 2023Document32 pagesBeyond Today - July /august 2023United Church of GodNo ratings yet
- Conjuring For Amateurs (1901)Document138 pagesConjuring For Amateurs (1901)jgokey100% (1)
- The 80's Sample ChapterDocument27 pagesThe 80's Sample ChapterNova Mejisien100% (6)
- Operation Guide PDFDocument86 pagesOperation Guide PDFLuis Eduardo Albarracin RugelesNo ratings yet
- Revised Philippine ECCD Checklist ManualDocument25 pagesRevised Philippine ECCD Checklist ManualMary Anne Alcantara97% (38)
- The Bone Book-An Orthopedic Pocket Manual (2020)Document234 pagesThe Bone Book-An Orthopedic Pocket Manual (2020)Mohammad IbrahimNo ratings yet
- Hand, Elbow, ShoulderDocument681 pagesHand, Elbow, ShoulderPaulbert Hernandez100% (1)
- Clinical Signs - NamedDocument9 pagesClinical Signs - NamedsprapurNo ratings yet
- Muscle Origins and InsertionsDocument9 pagesMuscle Origins and Insertionsnoisytaost92% (12)
- Kinesiology Flashcards, 3E - Lippert, Lynn S., Minor, Mary Alice Duesterhause PDFDocument219 pagesKinesiology Flashcards, 3E - Lippert, Lynn S., Minor, Mary Alice Duesterhause PDFOrNo ratings yet
- Peat 1Document37 pagesPeat 1Denise Junio100% (4)
- Helicopter Freewheel Unit Design GuideDocument240 pagesHelicopter Freewheel Unit Design Guidemattgrubbs100% (1)
- Sree Mahaganapathi Tarpana VidhiDocument19 pagesSree Mahaganapathi Tarpana Vidhim.s.subramania sharmaNo ratings yet
- OperacionesDocument86 pagesOperacionesdiego contrerasNo ratings yet
- 3-5 Handwriting Manual-Moore CountyDocument96 pages3-5 Handwriting Manual-Moore CountyMichelle FPNo ratings yet
- Ryobi 3302 Service ManualDocument568 pagesRyobi 3302 Service Manualvijayakumasar81% (21)
- Prometric PDFDocument112 pagesPrometric PDFNizar Boussoffara100% (1)
- 2 5416087904969556847 PDFDocument480 pages2 5416087904969556847 PDFArvindhanNo ratings yet
- Tabel Gerakan Sendi Di Neck Trunk Upper Amp Lower Extremity PDF FreeDocument30 pagesTabel Gerakan Sendi Di Neck Trunk Upper Amp Lower Extremity PDF FreeIchlasul AkmalNo ratings yet
- Finger Tip InjuryDocument39 pagesFinger Tip InjurySantomi PratamaNo ratings yet
- Kumi KataDocument152 pagesKumi Katasbastos16777100% (1)
- Knife SkillsDocument15 pagesKnife SkillsAbbie TantengcoNo ratings yet
- United States PatentDocument6 pagesUnited States PatentLucian CostacheNo ratings yet
- 1977 - Artificial Elbow Mechanism - Us4038706Document7 pages1977 - Artificial Elbow Mechanism - Us4038706Arturo VaineNo ratings yet
- United States Patent (19) : 73) Assignee: Children's Hospital at Stanford, PaloDocument7 pagesUnited States Patent (19) : 73) Assignee: Children's Hospital at Stanford, PaloLaura CursaruNo ratings yet
- United States Patent (19) : May 20, 1986 11 Patent Number: (45) Date of PatentDocument11 pagesUnited States Patent (19) : May 20, 1986 11 Patent Number: (45) Date of PatentwendersoncsdepNo ratings yet
- United States PatentDocument10 pagesUnited States PatentendhylakausuNo ratings yet
- Us3757634 PDFDocument6 pagesUs3757634 PDFagustinzmNo ratings yet
- US Patent 3884090Document5 pagesUS Patent 3884090sthollanderNo ratings yet
- United States Patent (19) : GravelineDocument15 pagesUnited States Patent (19) : Graveline155No ratings yet
- Diagrama Electrico de ControlDocument7 pagesDiagrama Electrico de ControlemernelsonmanNo ratings yet
- Dobby ControlDocument14 pagesDobby ControlPradip GuptaNo ratings yet
- United States Patent (19) (11) Patent Number: 5,243,873Document10 pagesUnited States Patent (19) (11) Patent Number: 5,243,873Nile_JockeyNo ratings yet
- Us4200161 PDFDocument6 pagesUs4200161 PDFBrunno VasquesNo ratings yet
- US4594671Document7 pagesUS4594671David Manuel Flores FloresNo ratings yet
- Z 2 Ezzx: United States PatentDocument7 pagesZ 2 Ezzx: United States Patentjai2009No ratings yet
- Diseño de Impulsores para Mezcla de SuspensionesDocument9 pagesDiseño de Impulsores para Mezcla de SuspensionesrwtoorresdNo ratings yet
- US4893426Document7 pagesUS4893426Jean DelaronciereNo ratings yet
- Iiihiii: United States PatentDocument9 pagesIiihiii: United States PatentmarlondijiNo ratings yet
- US20140302938A1Document15 pagesUS20140302938A1雷黎明No ratings yet
- Us6230368 PDFDocument9 pagesUs6230368 PDFSantoshNo ratings yet
- United States Patent (19) : Debarge Dec. 17, 1985Document9 pagesUnited States Patent (19) : Debarge Dec. 17, 198563No ratings yet
- United States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005Document10 pagesUnited States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005tristanNo ratings yet
- "Ze 34%une: Aray6/WarDocument6 pages"Ze 34%une: Aray6/WarMark FNo ratings yet
- Cityfix Operating Instructions - 09-2004Document34 pagesCityfix Operating Instructions - 09-2004ismail emre canbolatNo ratings yet
- US3889885Document7 pagesUS3889885Claudinei MayerNo ratings yet
- United States Patent (191: Fluoroscopic and Radiographic 2,132,353) 1513Document12 pagesUnited States Patent (191: Fluoroscopic and Radiographic 2,132,353) 1513bruno hoffmannNo ratings yet
- United States Patent (19) : 11 Patent Number: 45) Date of Patent: Jan. 7, 1997Document9 pagesUnited States Patent (19) : 11 Patent Number: 45) Date of Patent: Jan. 7, 1997Kaustubh PanchalNo ratings yet
- Luva de CouroDocument6 pagesLuva de CouroGabriel AlvesNo ratings yet
- United States Patent: Forward-Reverse and BrakeDocument6 pagesUnited States Patent: Forward-Reverse and Brakejai2009No ratings yet
- United States Patent (191Document17 pagesUnited States Patent (191Soma GhoshNo ratings yet
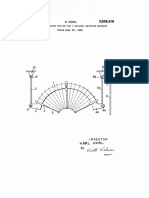
- April 28, 1970 K. Kohl 3,508,419: Filed June 25, 1968Document3 pagesApril 28, 1970 K. Kohl 3,508,419: Filed June 25, 1968Sher Hai HamNo ratings yet
- United States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Document26 pagesUnited States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Soma GhoshNo ratings yet
- United States Patent (191 (11) Patent Number: 4,857,881Document9 pagesUnited States Patent (191 (11) Patent Number: 4,857,881Harish MahadevanNo ratings yet
- Meccanismo T.R.Document6 pagesMeccanismo T.R.Marco Raneo PezzanoNo ratings yet
- keiser专利3Document10 pageskeiser专利3壮No ratings yet
- United States Patent (19) : 11 Patent Number: 45 Date of PatentDocument12 pagesUnited States Patent (19) : 11 Patent Number: 45 Date of Patentعلی ربانیNo ratings yet
- US4458549Document8 pagesUS4458549Chandru VelNo ratings yet
- Sewing MachineDocument6 pagesSewing MachinesadagoapanNo ratings yet
- United States Patent (19) : Felix-DalichowDocument5 pagesUnited States Patent (19) : Felix-DalichowBarmak CheraghiNo ratings yet
- United States Patent (19) (11) Patent Number: 4,727,781: Yuehui Et Al. (45) Date of Patent: Mar. 1, 1988Document31 pagesUnited States Patent (19) (11) Patent Number: 4,727,781: Yuehui Et Al. (45) Date of Patent: Mar. 1, 1988Siul OtreborNo ratings yet
- Us3789638 PDFDocument13 pagesUs3789638 PDFjdanacayaNo ratings yet
- US4643637Document7 pagesUS4643637saifur rahmanNo ratings yet
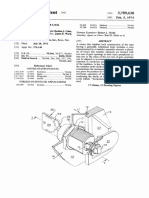
- United States Patent (19) : (45) July 1, 1975Document6 pagesUnited States Patent (19) : (45) July 1, 1975Rodrigo ContrerasNo ratings yet
- Patente de Dedo MecanicoDocument10 pagesPatente de Dedo MecanicoOscar MartinezNo ratings yet
- United States Patent (19) : Berg (45) Date of Patent: Dec. 1, 1998Document9 pagesUnited States Patent (19) : Berg (45) Date of Patent: Dec. 1, 1998454No ratings yet
- Natural Frequency Vibrating ScreenDocument7 pagesNatural Frequency Vibrating ScreenJuliana AguiarNo ratings yet
- Belt Fed BAR (Belgium) US2136512Document4 pagesBelt Fed BAR (Belgium) US2136512apoorva singhNo ratings yet
- The Intrinsic Hand-A 22 Degree-Of-Freedom Artificial Hand-Wrist ReplacementDocument6 pagesThe Intrinsic Hand-A 22 Degree-Of-Freedom Artificial Hand-Wrist Replacementriza zulkarnainNo ratings yet
- User Instruction: Refrigerated CabinetDocument16 pagesUser Instruction: Refrigerated CabinetgeraldjosepavonNo ratings yet
- United States Patent: 72 Inventor Richard F. ReinkeDocument13 pagesUnited States Patent: 72 Inventor Richard F. Reinkeعبد الحليم رغدةNo ratings yet
- Arm - TX Series 90 Family: CharacteristicsDocument44 pagesArm - TX Series 90 Family: Characteristicstestnotification100% (1)
- Tendon Transmission Efficiency of A Two-Finger Haptic Glove: Zhou MA, Pinhas Ben-TzviDocument6 pagesTendon Transmission Efficiency of A Two-Finger Haptic Glove: Zhou MA, Pinhas Ben-TzviDanny DurhamNo ratings yet
- US767303Document4 pagesUS767303George AcostaNo ratings yet
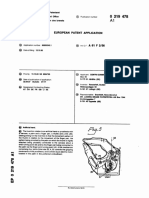
- 1986 - Artificial Hand - EP0219478A1Document10 pages1986 - Artificial Hand - EP0219478A1Arturo VaineNo ratings yet
- Us4380197 PDFDocument8 pagesUs4380197 PDFsoNo ratings yet
- SGD 3 Elbow and Hand ANA LAB PDFDocument4 pagesSGD 3 Elbow and Hand ANA LAB PDFim. EliasNo ratings yet
- Hand-Tai Yin) Lung MeridianDocument4 pagesHand-Tai Yin) Lung MeridianimanuelNo ratings yet
- Scientific Study of Kshipra MarmaDocument4 pagesScientific Study of Kshipra MarmaDivya UnkuleNo ratings yet
- Building Machines That Emulate Humans: Lesson Plan and More Resources Are Available At: Aka - Ms/hackingstemDocument34 pagesBuilding Machines That Emulate Humans: Lesson Plan and More Resources Are Available At: Aka - Ms/hackingstemAndré FozzyNo ratings yet
- Anatomy of ForearmDocument88 pagesAnatomy of Forearmromaisa akhtarNo ratings yet
- Hand Infections: DR - Lily Deneke, GSRIII Moderator:Dr - Metasebia, Assistant Professor of Plastic and Reconstructive SurgeryDocument40 pagesHand Infections: DR - Lily Deneke, GSRIII Moderator:Dr - Metasebia, Assistant Professor of Plastic and Reconstructive SurgeryLily DenekeNo ratings yet
- Ape Thumb DeformitiesDocument13 pagesApe Thumb DeformitiesshibuazeezNo ratings yet
- Lifern's Anatomy: Limbs & Trunk: Thorax.................................................. 32Document162 pagesLifern's Anatomy: Limbs & Trunk: Thorax.................................................. 32natheNo ratings yet
- Lab Worksheet: Reflexes: 1. Knee-Jerk or Patellar ReflexDocument2 pagesLab Worksheet: Reflexes: 1. Knee-Jerk or Patellar Reflexapi-306342919No ratings yet
- Referat Claw and Club Hand: Ribka Theodora - Hand 3 Mentor: Dr. Betha Egih Riestiano, Spbp-ReDocument25 pagesReferat Claw and Club Hand: Ribka Theodora - Hand 3 Mentor: Dr. Betha Egih Riestiano, Spbp-ReRibka TheodoraNo ratings yet
- Hand - Extensor Tendon Repair Protocol PT (All)Document11 pagesHand - Extensor Tendon Repair Protocol PT (All)Kamran AfzalNo ratings yet
- Introduction To String FiguresDocument48 pagesIntroduction To String FiguresHatfulloftricks700No ratings yet