You might also like
- Us 4023499Document4 pagesUs 4023499ererNo ratings yet
- Us3789638 PDFDocument13 pagesUs3789638 PDFjdanacayaNo ratings yet
- Us 5775636Document6 pagesUs 5775636wewewewNo ratings yet
- US4893426Document7 pagesUS4893426Jean DelaronciereNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument7 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAaron LuoNo ratings yet
- United States Patent (19) : Felix-DalichowDocument5 pagesUnited States Patent (19) : Felix-DalichowBarmak CheraghiNo ratings yet
- US Patent 3884090Document5 pagesUS Patent 3884090sthollanderNo ratings yet
- Tepzz 8Z 95B - T: European Patent SpecificationDocument10 pagesTepzz 8Z 95B - T: European Patent SpecificationjorgeNo ratings yet
- US20140302938A1Document15 pagesUS20140302938A1雷黎明No ratings yet
- US4335764Document7 pagesUS4335764Jorge ArbelaezNo ratings yet
- Unlted States Patent (10) Patent N0.2 US 7,421,937 B1Document24 pagesUnlted States Patent (10) Patent N0.2 US 7,421,937 B1Jin SongNo ratings yet
- 块化插入触发器的方法和装置5 PDFDocument23 pages块化插入触发器的方法和装置5 PDFJin SongNo ratings yet
- AzimuthDocument14 pagesAzimuthAhmed JafarNo ratings yet
- US4458549Document8 pagesUS4458549Chandru VelNo ratings yet
- United States Patent (191: Fujimoto (11) 4,190,411Document7 pagesUnited States Patent (191: Fujimoto (11) 4,190,411Vansala GanesanNo ratings yet
- United States Patent: (12) (10) Patent N0.: US 6,349,819 B1Document12 pagesUnited States Patent: (12) (10) Patent N0.: US 6,349,819 B1landagoNo ratings yet
- United States Patent: GitnesDocument9 pagesUnited States Patent: GitnesrakkaNo ratings yet
- United States PatentDocument10 pagesUnited States PatentendhylakausuNo ratings yet
- (12 Ulllted States Patent (10) Patent No.: US 6,860,188 B2Document13 pages(12 Ulllted States Patent (10) Patent No.: US 6,860,188 B2Selvaraji MuthuNo ratings yet
- Us 3960084Document3 pagesUs 3960084rte678No ratings yet
- United States Patent (19) : Filed: July 27, 1976 57Document3 pagesUnited States Patent (19) : Filed: July 27, 1976 57Alexandre Magno Bernardo FontouraNo ratings yet
- Us 4476409Document7 pagesUs 4476409Shankar PediredlaNo ratings yet
- US3982767Document6 pagesUS3982767takanobu ouraNo ratings yet
- United States Patent (19) (11) Patent Number: 5,243,873Document10 pagesUnited States Patent (19) (11) Patent Number: 5,243,873Nile_JockeyNo ratings yet
- TEPZZ 5649 8B - T: European Patent SpecificationDocument13 pagesTEPZZ 5649 8B - T: European Patent SpecificationneusonNo ratings yet
- US2447117Document6 pagesUS2447117MahnooshNo ratings yet
- US4707035Document5 pagesUS4707035aungkyawzoreNo ratings yet
- United States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Document26 pagesUnited States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Soma GhoshNo ratings yet
- United States Patent (191 (11) Patent Number: 4,857,881Document9 pagesUnited States Patent (191 (11) Patent Number: 4,857,881Harish MahadevanNo ratings yet
- Vernier Caliper PatentDocument9 pagesVernier Caliper Patentmeinard angelesNo ratings yet
- 1977 - Artificial Elbow Mechanism - Us4038706Document7 pages1977 - Artificial Elbow Mechanism - Us4038706Arturo VaineNo ratings yet
- United States Patent (10) Patent No.: US 6,453,528 B1Document9 pagesUnited States Patent (10) Patent No.: US 6,453,528 B1MahnooshNo ratings yet
- United States Patent (19) : (11) Patent Number: (45) Date of PatentDocument12 pagesUnited States Patent (19) : (11) Patent Number: (45) Date of PatentOctavio HernandezNo ratings yet
- United States Patent (19) : Miiller (45) Date of PatentDocument8 pagesUnited States Patent (19) : Miiller (45) Date of PatentRodrigoPomaNo ratings yet
- United States Patent (19) : Filed: Feb. 14, 1972Document5 pagesUnited States Patent (19) : Filed: Feb. 14, 1972zgregzNo ratings yet
- Patente BlumrichDocument9 pagesPatente Blumrichisrael itaNo ratings yet
- United States Patent (19) : Meyer 11 Patent Number: 45 Date of Patent: Foreign Patent DocumentsDocument8 pagesUnited States Patent (19) : Meyer 11 Patent Number: 45 Date of Patent: Foreign Patent DocumentsUvxtalNo ratings yet
- TEPZZ 4979Z B - T: European Patent SpecificationDocument12 pagesTEPZZ 4979Z B - T: European Patent SpecificationAna LisaNo ratings yet
- US5303813Document7 pagesUS5303813AdailsonNo ratings yet
- Patent USPTO 4098523 Traction DeviceDocument5 pagesPatent USPTO 4098523 Traction Devicexeron7126No ratings yet
- United States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005Document10 pagesUnited States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005tristanNo ratings yet
- Ulllted States Patent (19) (11) Patent Number: 5,937,809Document15 pagesUlllted States Patent (19) (11) Patent Number: 5,937,809LazarNo ratings yet
- US6435783 - Variable Radius Notching MachineDocument48 pagesUS6435783 - Variable Radius Notching MachineJackie SongNo ratings yet
- US4594671Document7 pagesUS4594671David Manuel Flores FloresNo ratings yet
- United States Patent 19Document9 pagesUnited States Patent 19Claudinei MayerNo ratings yet
- United States Patent: Berej Noi Et AlDocument6 pagesUnited States Patent: Berej Noi Et AlwewewewNo ratings yet
- Us 7628347Document6 pagesUs 7628347Pooria1989No ratings yet
- US4246661Document8 pagesUS4246661Stefania PredaNo ratings yet
- United States Patent (191: Kern Et' AlDocument4 pagesUnited States Patent (191: Kern Et' Aldgfhdg ereNo ratings yet
- Inventii ConstructiiDocument21 pagesInventii ConstructiiAdriana Daniela SanduNo ratings yet
- US Patent 6862832Document12 pagesUS Patent 6862832Mosin-NagantNo ratings yet
- Zero Drift Inertial Reference: J. A. HunterDocument10 pagesZero Drift Inertial Reference: J. A. Huntergustavo sosaNo ratings yet
- International BureauDocument15 pagesInternational BureauTAWHIDNo ratings yet
- US20140133980A1Document12 pagesUS20140133980A1雷黎明No ratings yet
- United States Patent (10) Patent No.: US 8.491,250 B2Document10 pagesUnited States Patent (10) Patent No.: US 8.491,250 B2RoyLoraGallardoNo ratings yet
- Brevet Filetare VartejDocument12 pagesBrevet Filetare Vartejirina100% (1)
- US2099314Document3 pagesUS2099314Jhonnatan E Avendaño Florez100% (1)
- Sewing MachineDocument6 pagesSewing MachinesadagoapanNo ratings yet
- United States Patent (191Document7 pagesUnited States Patent (191wewewewNo ratings yet
- Zanda Handout Brochure CompressedDocument28 pagesZanda Handout Brochure CompressedHamayet RaselNo ratings yet
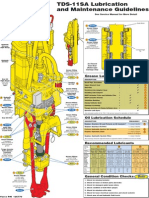
- Top Drive Varco TDS 11 Lubrication PDFDocument1 pageTop Drive Varco TDS 11 Lubrication PDFWilliam TuckerNo ratings yet
- Ockham: Fap/Faf I-Gg 8.6Document1 pageOckham: Fap/Faf I-Gg 8.6Mark McKinsnkeyNo ratings yet
- Material and Labor: Phase 1Document49 pagesMaterial and Labor: Phase 1Meba Z Betre YosephNo ratings yet
- Integrating Security No Pain RequiredDocument12 pagesIntegrating Security No Pain Requiredbmystik3kNo ratings yet
- Putri Iona - Survey StatusDocument28 pagesPutri Iona - Survey StatusDiana Triswasti KumariNo ratings yet
- Civil EngineeringDocument63 pagesCivil EngineeringNaniNo ratings yet
- Udakashanthi RugDocument61 pagesUdakashanthi RugVidya SampathNo ratings yet
- Joint Venture Accounting (JVA) : SAP AG 2002Document38 pagesJoint Venture Accounting (JVA) : SAP AG 2002Himanshu OswalNo ratings yet
- Dokumen - Tips Obd2repair Single PCB Autocom Delphi With CDP DelphiDocument3 pagesDokumen - Tips Obd2repair Single PCB Autocom Delphi With CDP DelphiGleison GomesNo ratings yet
- Rubrik Short Report MODULE 1 and Module 2Document1 pageRubrik Short Report MODULE 1 and Module 2Chew Zhi HaoNo ratings yet
- Calculation of Steel Consumption Per Vehicle at TataDocument22 pagesCalculation of Steel Consumption Per Vehicle at TataVIbhor RakshitNo ratings yet
- Frenos y Embragues BuanlirDocument24 pagesFrenos y Embragues BuanlirVictor Edwin Rocha VillegasNo ratings yet
- Video Games Survey: Finolex Academy of Management and Technology, RatnagiriDocument5 pagesVideo Games Survey: Finolex Academy of Management and Technology, RatnagiriAyushi BhatkarNo ratings yet
- Books For GATE Mechanical EngineeringDocument3 pagesBooks For GATE Mechanical EngineeringJerry TomNo ratings yet
- Point To Point Microwave TransmissionDocument83 pagesPoint To Point Microwave Transmissionfatmirz9448No ratings yet
- UNV-UNV-SIM7600CE V2.2.5 User Manual V1.0: Time Descriptions 2017/6/6 Initial V1.0Document6 pagesUNV-UNV-SIM7600CE V2.2.5 User Manual V1.0: Time Descriptions 2017/6/6 Initial V1.0Mariano Gomez BidondoNo ratings yet
- En 1555-4 (2002)Document15 pagesEn 1555-4 (2002)joaoferreiraprfNo ratings yet
- 10 Easy Tips To Keep Your Bathroom Smelling Fresh NaturallyDocument10 pages10 Easy Tips To Keep Your Bathroom Smelling Fresh NaturallyHaria BitalangisNo ratings yet
- NON Destructive Testing of Concrete Structures - Ravi Ranade NDT PaperDocument42 pagesNON Destructive Testing of Concrete Structures - Ravi Ranade NDT Paperalok100% (1)
- MSDS Polyurea CoatingDocument3 pagesMSDS Polyurea CoatingHamzah Sabtian SitorusNo ratings yet
- CNC 3020 DJ GuideDocument13 pagesCNC 3020 DJ GuideEdison MarquesNo ratings yet
- A320 CB-PanelsDocument95 pagesA320 CB-Panelsyazan999No ratings yet
- Visualize and Graph ESP-32 Sensor DataDocument23 pagesVisualize and Graph ESP-32 Sensor DataObi InwelegbuNo ratings yet
- Preliminary Design of A Short Afterburner For Single-Spool Expendable Turbojet EngineDocument12 pagesPreliminary Design of A Short Afterburner For Single-Spool Expendable Turbojet EngineGabriel AlbornozNo ratings yet
- Elgi Equipments - Initiating CoverageDocument23 pagesElgi Equipments - Initiating CoveragerabharatNo ratings yet
- KyotoCooling Co-Location Impact CPXDocument6 pagesKyotoCooling Co-Location Impact CPXChris FultonNo ratings yet
- How To CrackDocument369 pagesHow To CrackNaveen ManiNo ratings yet
- Tutorial AFR MeterDocument8 pagesTutorial AFR MeterAbi BintaraNo ratings yet
- How To Use Ms ExcelDocument18 pagesHow To Use Ms Excelapi-218352367No ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)From EverandAutodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)No ratings yet
- Designing SCADA Application Software: A Practical ApproachFrom EverandDesigning SCADA Application Software: A Practical ApproachNo ratings yet
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsFrom EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsRating: 4.5 out of 5 stars4.5/5 (10)