You might also like
- Electromechanical Energy Conversion Lab ReportDocument14 pagesElectromechanical Energy Conversion Lab ReportNic0sNo ratings yet
- Additional Topics in Variance Analysis: True / False QuestionsDocument232 pagesAdditional Topics in Variance Analysis: True / False QuestionsElaine GimarinoNo ratings yet
- Lab Manual.15 PDFDocument34 pagesLab Manual.15 PDFBoovarahan ChakravarthyNo ratings yet
- LEP 1.3.19 Laws of Gyroscopes / 3-Axis Gyroscope: Related Topics ProblemsDocument3 pagesLEP 1.3.19 Laws of Gyroscopes / 3-Axis Gyroscope: Related Topics ProblemsDenis PANo ratings yet
- Gyroscopic EffectsDocument28 pagesGyroscopic EffectsrathanNo ratings yet
- The Torsional OscillatorDocument4 pagesThe Torsional OscillatorAlex McGintyNo ratings yet
- A V Chubukov 1991 J. Phys. Condens. Matter 3 69Document15 pagesA V Chubukov 1991 J. Phys. Condens. Matter 3 69poecoek84No ratings yet
- Moment InersiaDocument16 pagesMoment InersiaNad NadyaNo ratings yet
- Siah Ma Koun 1997Document9 pagesSiah Ma Koun 1997Juan Diego Florez VeraNo ratings yet
- Electromagnetic Support Arrangement With Threedimensional Control. Ii. ExperimentalDocument3 pagesElectromagnetic Support Arrangement With Threedimensional Control. Ii. Experimentalandres sanchezNo ratings yet
- Paper - 2023 - Rigidly-Rotating Scalar Fields - Between Real Divergence and Imaginary FractalizationDocument31 pagesPaper - 2023 - Rigidly-Rotating Scalar Fields - Between Real Divergence and Imaginary FractalizationMaxime ChernodubNo ratings yet
- GyroscopeDocument7 pagesGyroscopeRajesh SarkarNo ratings yet
- Spinning FieldDocument15 pagesSpinning Fieldmkrinker1296100% (1)
- Test of Equivalence Principle For Particles With Spin - 2Document2 pagesTest of Equivalence Principle For Particles With Spin - 2John BirdNo ratings yet
- Exp 6 GyroscopeDocument25 pagesExp 6 GyroscopeBikash ChoudhuriNo ratings yet
- PhysRevLett 79 1393Document4 pagesPhysRevLett 79 1393Arantxa Fraile-RodriguezNo ratings yet
- Electromagnetic Force ComputationDocument7 pagesElectromagnetic Force Computationyash_ganatraNo ratings yet
- SpectrosDocument70 pagesSpectrosAlmas FatimaNo ratings yet
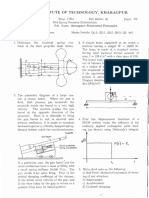
- 2014 Ae31002 PDFDocument1 page2014 Ae31002 PDFvibhubhatNo ratings yet
- Search For Time-Reversal Symmetry Breaking in Unconventional SuperconductorsDocument3 pagesSearch For Time-Reversal Symmetry Breaking in Unconventional SuperconductorsrefurlNo ratings yet
- Anti GravityDocument0 pagesAnti Gravitydewidewi76No ratings yet
- Ring Laser GyroDocument6 pagesRing Laser GyrovishwaaskNo ratings yet
- Improved Limits On Spin-Mass Interactions: Department of Physics, Princeton UniversityDocument6 pagesImproved Limits On Spin-Mass Interactions: Department of Physics, Princeton UniversityBart MaxNo ratings yet
- Lab 11 ManualDocument6 pagesLab 11 Manualmubarik aliNo ratings yet
- Dynamics Lab MANUAL New PrintDocument56 pagesDynamics Lab MANUAL New PrintMartin De Boras PragashNo ratings yet
- On The Spectrum Behavior of Vibrated Granular MatterDocument4 pagesOn The Spectrum Behavior of Vibrated Granular MatterJofi001No ratings yet
- TT Subhajit Das 35Document9 pagesTT Subhajit Das 35rakeshmanna815No ratings yet
- Gravitational Couplings of Intrinsic Spin - 12Document12 pagesGravitational Couplings of Intrinsic Spin - 12John BirdNo ratings yet
- V14 N3 1975 MobleyDocument8 pagesV14 N3 1975 Mobleyraa2010No ratings yet
- Russian SEGDocument9 pagesRussian SEGrichcollins6217No ratings yet
- Final FinalDocument8 pagesFinal FinalG Santosh BabuNo ratings yet
- Self-Excitation of Systems With Periodically Varying InductancesDocument6 pagesSelf-Excitation of Systems With Periodically Varying InductancesharishkumarsinghNo ratings yet
- Stability of Synchronous MachinesDocument13 pagesStability of Synchronous MachinesJavierNo ratings yet
- Carpick 2006 ReviewOfSci - Instruments77 033706 PDFDocument7 pagesCarpick 2006 ReviewOfSci - Instruments77 033706 PDFhitesh_tilalaNo ratings yet
- Physic Project For Grade 12 CbseDocument15 pagesPhysic Project For Grade 12 Cbsemihir khabiyaNo ratings yet
- Assignment-1 Vibrations 2017Document3 pagesAssignment-1 Vibrations 2017Arpit Sharma0% (1)
- Lotte Holmegaard Et Al - Control of Rotational Wave-Packet Dynamics in Asymmetric Top MoleculesDocument4 pagesLotte Holmegaard Et Al - Control of Rotational Wave-Packet Dynamics in Asymmetric Top MoleculesMddl2aNo ratings yet
- Electrodynamic Shaker Fundamentals PDFDocument8 pagesElectrodynamic Shaker Fundamentals PDFJorge Luis Ardila MatajiraNo ratings yet
- IMAC XVII 17th 174005 Backward Whirl Investigations Isotropic Anisotropic SystemsDocument7 pagesIMAC XVII 17th 174005 Backward Whirl Investigations Isotropic Anisotropic Systemsbigsteve9088No ratings yet
- Paper - 2023 - Negative Moment of Inertia and Rotational Instability of Gluon PlasmaDocument8 pagesPaper - 2023 - Negative Moment of Inertia and Rotational Instability of Gluon PlasmaMaxime ChernodubNo ratings yet
- Magneto Acoustic Resonance - GdAlO3Document11 pagesMagneto Acoustic Resonance - GdAlO3Yoshio KuramotoNo ratings yet
- Gnitc/Set/Dme Kinematics&Dynamics LabDocument32 pagesGnitc/Set/Dme Kinematics&Dynamics LabdivyanshNo ratings yet
- Cannon R-1962Document13 pagesCannon R-1962Петро ДмитеркоNo ratings yet
- 0508034Document12 pages0508034Faiz AlamNo ratings yet
- Gyroscopes & AntigravityDocument9 pagesGyroscopes & AntigravityscribdgutoNo ratings yet
- AMI UNIT III Presentation 2 01.09.2020Document18 pagesAMI UNIT III Presentation 2 01.09.2020Jayashree SathiyanarayananNo ratings yet
- Gravity Method: General Field of The EarthDocument10 pagesGravity Method: General Field of The Earthአንተነህ ኃይሌ ክንፈገብርኤልNo ratings yet
- Magnetic Moment in An External Magnetic FieldDocument3 pagesMagnetic Moment in An External Magnetic FieldHemida Hamed Hemida MohammedNo ratings yet
- Molecular Dynamics SiCDocument15 pagesMolecular Dynamics SiCAnoushka GuptaNo ratings yet
- Torsional Instability of Single Axis Solar Tracking Systems Rohr Bourke Banks 2015Document7 pagesTorsional Instability of Single Axis Solar Tracking Systems Rohr Bourke Banks 2015bpchimeraNo ratings yet
- Trajectory - Tracking - of - A - Pneumatically - Driven - PDocument6 pagesTrajectory - Tracking - of - A - Pneumatically - Driven - PQuyết Nguyễn CôngNo ratings yet
- AgNO3 IRDocument7 pagesAgNO3 IRFerXo's AppleSmith SoloNo ratings yet
- Flag EffectDocument6 pagesFlag Effectchau nguyenNo ratings yet
- VerbruggenDocument5 pagesVerbruggenPaulo H TavaresNo ratings yet
- Bloembergen-Spin Relaxation Processes in A Two-Proton SystemDocument6 pagesBloembergen-Spin Relaxation Processes in A Two-Proton SystemIsra RMNo ratings yet
- Principles of MriDocument28 pagesPrinciples of MriAbasiama UdemeNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 5: Gravitational and Inertial Control, #5From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 5: Gravitational and Inertial Control, #5No ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 2: Gravitational and Inertial Control, #2From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 2: Gravitational and Inertial Control, #2No ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4No ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6No ratings yet
- LRL Accelerators, The 184-Inch SynchrocyclotronFrom EverandLRL Accelerators, The 184-Inch SynchrocyclotronNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3No ratings yet
- Kichael Carley Acoustics-11-23Document13 pagesKichael Carley Acoustics-11-23eki7777No ratings yet
- Sonics and Ultrasonics Early History and ApplicationsDocument8 pagesSonics and Ultrasonics Early History and Applicationseki7777No ratings yet
- Sensitive Flames and SoundDocument9 pagesSensitive Flames and Soundeki7777No ratings yet
- Atmospheric TidesDocument41 pagesAtmospheric Tideseki7777No ratings yet
- Sparby Hegel - and - SteinerDocument28 pagesSparby Hegel - and - Steinereki7777No ratings yet
- Critical Thinking and Effective Writing Skills For The Professional AccountantDocument13 pagesCritical Thinking and Effective Writing Skills For The Professional AccountantArnel RemorinNo ratings yet
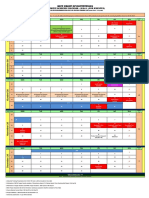
- Academic Calendar Odd Sem 2020-21Document1 pageAcademic Calendar Odd Sem 2020-21NAMRATA SHARMANo ratings yet
- 3d. HG-982 Technical ExperienceDocument23 pages3d. HG-982 Technical ExperienceOpuba ChristianNo ratings yet
- Confirmation BiasDocument3 pagesConfirmation BiasmuitsNo ratings yet
- Tle CSS9 Q3 M6Document13 pagesTle CSS9 Q3 M6caberjhandereugeneNo ratings yet
- Week15 1 Nov PDFDocument137 pagesWeek15 1 Nov PDFdas_622426686No ratings yet
- Ge7 ModDocument5 pagesGe7 Modaldo galloNo ratings yet
- Workshop Manual: Group 30 Electrical System IDocument176 pagesWorkshop Manual: Group 30 Electrical System Irichard castañeda100% (1)
- XL640 User ManualDocument213 pagesXL640 User ManualSIELAB C.A.No ratings yet
- Ise Online Access For Introduction To Operations Research 11Th Edition Hillier Full ChapterDocument51 pagesIse Online Access For Introduction To Operations Research 11Th Edition Hillier Full Chapterdarrell.berry639100% (4)
- Starters: Grammar Unit 11Document8 pagesStarters: Grammar Unit 11andres lNo ratings yet
- WAP To Find The Sum of The Series S 1 + (3/2!) + (5/3!) + (7/4!) + ....... To NDocument8 pagesWAP To Find The Sum of The Series S 1 + (3/2!) + (5/3!) + (7/4!) + ....... To NSOUMYA MAHAPATRANo ratings yet
- Finrl: Deep Reinforcement Learning Framework To Automate Trading in Quantitative FinanceDocument9 pagesFinrl: Deep Reinforcement Learning Framework To Automate Trading in Quantitative FinancegyhtujrtyNo ratings yet
- Mckenzie Ross Resume 3 12 15Document1 pageMckenzie Ross Resume 3 12 15api-281264881No ratings yet
- Foundatin of Engeneering 2Document16 pagesFoundatin of Engeneering 2sunshaniNo ratings yet
- MR Collins Maths Year 11 HomeworkDocument6 pagesMR Collins Maths Year 11 Homeworkafeueffmk100% (1)
- Face ReadingDocument8 pagesFace Readinggougougr8499No ratings yet
- Details of Leather Importers: S. No. Name/Address/Contact Details Website /email Winchester Leathers LTDDocument2 pagesDetails of Leather Importers: S. No. Name/Address/Contact Details Website /email Winchester Leathers LTDPsikoNo ratings yet
- JVC KD r540 Manual de InstruccionesDocument16 pagesJVC KD r540 Manual de InstruccionesJesus FloresNo ratings yet
- Asking The Right QuestionsDocument72 pagesAsking The Right QuestionsAnubhav MishraNo ratings yet
- The Mindset of Focusing For Success - Jane HolderDocument19 pagesThe Mindset of Focusing For Success - Jane HoldermehtavinNo ratings yet
- Auditing Quiz - Cash and Cash EquivalentsDocument2 pagesAuditing Quiz - Cash and Cash EquivalentsRonel CaagbayNo ratings yet
- Actividad 6 Semana 3 - UndécimoDocument6 pagesActividad 6 Semana 3 - UndécimoanonimusNo ratings yet
- Very Good Paper On Dual Polarized AntennaDocument14 pagesVery Good Paper On Dual Polarized AntennaHAPURNo ratings yet
- GRADE 11 General Mathematics Week 2 Quarter 1 ModuleDocument12 pagesGRADE 11 General Mathematics Week 2 Quarter 1 ModuleCasey Erica Nicole CarranzaNo ratings yet
- Strategic Supply Chain ManagementDocument16 pagesStrategic Supply Chain ManagementKknow Ddrug100% (3)
- Excavations OSHA Competent Person Course 2Document17 pagesExcavations OSHA Competent Person Course 2MelchezadekNo ratings yet
- Anaximenes (D. 528 BCE) : 1. Doctrine of AirDocument6 pagesAnaximenes (D. 528 BCE) : 1. Doctrine of AirEvoline LimNo ratings yet