You might also like
- Fuzhou Tianyu Electric Co., LTD.: KYN31-12 Armored Metal-Enclosed Switch CabinetDocument26 pagesFuzhou Tianyu Electric Co., LTD.: KYN31-12 Armored Metal-Enclosed Switch CabinetRusman LumbantoruanNo ratings yet
- MV CONNEX Technical Data Surge Arrester Size 2 and DrawingDocument6 pagesMV CONNEX Technical Data Surge Arrester Size 2 and DrawingFelipe Mafioletti SchuartzNo ratings yet
- Apdcl TSDocument18 pagesApdcl TSBhavesh KeraliaNo ratings yet
- Skai 90 A2 Gd06-Wci 14282034Document12 pagesSkai 90 A2 Gd06-Wci 14282034nishant_dreamviewerNo ratings yet
- IBEX 108MHC EiGER 390 410 V3 - CompressedDocument2 pagesIBEX 108MHC EiGER 390 410 V3 - CompressedSamad mahliNo ratings yet
- Current TransformerDocument21 pagesCurrent Transformerbalaeee123No ratings yet
- Uni-Solar ES 62-T (PV Amorfos)Document2 pagesUni-Solar ES 62-T (PV Amorfos)luysfNo ratings yet
- Total ProteccionDocument8 pagesTotal ProteccionMark XavierNo ratings yet
- Contax ContactorDocument4 pagesContax Contactorheri fauziNo ratings yet
- ALA2F24Document4 pagesALA2F24Waldek LipskiNo ratings yet
- Cimre2ss8 24 OmDocument2 pagesCimre2ss8 24 OmCHINo ratings yet
- Jumper Cable Spec 14-16 PDFDocument3 pagesJumper Cable Spec 14-16 PDFRAMESH KUMARNo ratings yet
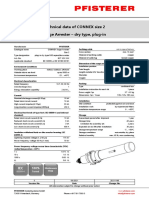
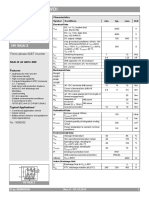
- Technical data of CONNEX size 2 surge arresterDocument4 pagesTechnical data of CONNEX size 2 surge arresterAasdasNo ratings yet
- NG7-40.5 Z Isatallation GuideDocument27 pagesNG7-40.5 Z Isatallation GuideWenceslao EscorzaNo ratings yet
- Schrack Power PCB Relay RPII/2: General Purpose Relays PCB RelaysDocument2 pagesSchrack Power PCB Relay RPII/2: General Purpose Relays PCB RelaysCor GratNo ratings yet
- Skai 45 A2 Gd12-WdiDocument9 pagesSkai 45 A2 Gd12-Wdinishant_dreamviewerNo ratings yet
- Marathon MX-1030-4Document7 pagesMarathon MX-1030-4YuriyNo ratings yet
- Pressure Transmitters: PXT-K SeriesDocument2 pagesPressure Transmitters: PXT-K Serieskarim karimNo ratings yet
- Schrack Power PCB Relay RTH 105°C 16ADocument2 pagesSchrack Power PCB Relay RTH 105°C 16AjpbarrioNo ratings yet
- 33kv Techni8cal Specification Edited FormatDocument16 pages33kv Techni8cal Specification Edited Formatvikas kumarNo ratings yet
- 74 MP100 TD enDocument5 pages74 MP100 TD enBa DuyNo ratings yet
- Gs01e08b01-00en (11) CaDocument9 pagesGs01e08b01-00en (11) CaNguyen ThuongNo ratings yet
- Actom Hve Ctb36 Outdoor Circuit Breakers Aug 2018 LRDocument6 pagesActom Hve Ctb36 Outdoor Circuit Breakers Aug 2018 LRGary FortuinNo ratings yet
- Technical Specification VCB PanelDocument14 pagesTechnical Specification VCB PanelDarshit VyasNo ratings yet
- HD Electrolytic Copper HD Electrolytic CopperDocument2 pagesHD Electrolytic Copper HD Electrolytic CopperAnkit Singh100% (1)
- Conext Core XC-NA Spec SheetDocument2 pagesConext Core XC-NA Spec Sheetbianca7sallesNo ratings yet
- Manual de Servicio Sharp - QT-CH88Document36 pagesManual de Servicio Sharp - QT-CH88Antonio CalderonNo ratings yet
- 12 KV Outdoor Type Ring Main UnitDocument10 pages12 KV Outdoor Type Ring Main Unitzeeshan SiddiquiNo ratings yet
- Flameproof Limit SwitchesDocument12 pagesFlameproof Limit SwitchesGianmarcoNo ratings yet
- Ti 80 0041 Installationshinweise Zur Leistungsverdrahtung en 1822 DeskDocument2 pagesTi 80 0041 Installationshinweise Zur Leistungsverdrahtung en 1822 Deskolivier.bigouretNo ratings yet
- Gas-Filled Contactor For High-Voltage DC SwitchingDocument8 pagesGas-Filled Contactor For High-Voltage DC SwitchingIslam Ahmad AbuhamamNo ratings yet
- HVC500B 24e X2300C011Document11 pagesHVC500B 24e X2300C011Craciun Razvan IlieNo ratings yet
- Hawe Pressure Dt11 d5440t2 enDocument4 pagesHawe Pressure Dt11 d5440t2 enАндрей дронNo ratings yet
- Potter & Brumfield Power PCB Relay RT2: General Purpose Relays PCB RelaysDocument3 pagesPotter & Brumfield Power PCB Relay RT2: General Purpose Relays PCB RelaysMai Thanh SơnNo ratings yet
- American - Zettler AZ732 053 52 DatasheetDocument2 pagesAmerican - Zettler AZ732 053 52 DatasheetZoro DNo ratings yet
- 250mW Slim Power RelayDocument3 pages250mW Slim Power RelayGeovanny SanJuanNo ratings yet
- RECT, Modul SM2000,48V/40A, AEGDocument7 pagesRECT, Modul SM2000,48V/40A, AEGjksiswanto100% (2)
- LK-P Relays: 10 A Slim Power RelayDocument3 pagesLK-P Relays: 10 A Slim Power RelayMilianny PardesNo ratings yet
- L&T MX Contactor Catalogue PDFDocument9 pagesL&T MX Contactor Catalogue PDFAnonymous lFFnnXmjUuNo ratings yet
- Schrack Miniature Power PCB RYII & RYII Reflow Solderable: General Purpose Relays PCB RelaysDocument4 pagesSchrack Miniature Power PCB RYII & RYII Reflow Solderable: General Purpose Relays PCB RelaysWilson Rubiano AlfaroNo ratings yet
- 60 Monocrystalline Cell ModulesDocument1 page60 Monocrystalline Cell ModulesEmmvee SolarNo ratings yet
- A043F870 - Rev - B UCDM274KDocument8 pagesA043F870 - Rev - B UCDM274Kjorge luisNo ratings yet
- EN FANOXPC DATA CT LowVoltageCloseCTIndoor CT80II-CT4II GC17 R03Document1 pageEN FANOXPC DATA CT LowVoltageCloseCTIndoor CT80II-CT4II GC17 R03arolnNo ratings yet
- HF152FDocument3 pagesHF152FTổ Điện LạnhNo ratings yet
- ST548KWH-250: Storage SystemDocument2 pagesST548KWH-250: Storage Systemsubkhan100% (1)
- 33kV & 22kV GIS Specifications PDFDocument15 pages33kV & 22kV GIS Specifications PDFAlauddin khanNo ratings yet
- General Purpose Relay: TA, TR Series Part Number DescriptionDocument17 pagesGeneral Purpose Relay: TA, TR Series Part Number DescriptionMIKENo ratings yet
- Datasheet - HK 17pcsa104mc19p 2390846Document2 pagesDatasheet - HK 17pcsa104mc19p 2390846Kroscop San Martin de LunaNo ratings yet
- Bdj005-90a-005 (k02) - Dual Relay SpecificationDocument4 pagesBdj005-90a-005 (k02) - Dual Relay SpecificationAung100% (2)
- FMP18 48Document2 pagesFMP18 48GreenoceanNo ratings yet
- Az 850Document2 pagesAz 850Aravindh RaNo ratings yet
- Technical Specification of 33/11KV Power TransformerDocument22 pagesTechnical Specification of 33/11KV Power TransformermlutfimaNo ratings yet
- PDFDocument15 pagesPDFNilesh KhareNo ratings yet
- DatasheetDocument3 pagesDatasheetmarius gandraburNo ratings yet
- Murf 820Document5 pagesMurf 820Mauricio BrochNo ratings yet
- Moc3072m DDocument13 pagesMoc3072m DhiperdyniaNo ratings yet
- HT Cable Termination Kit 14.3.22Document8 pagesHT Cable Termination Kit 14.3.22JIGSNo ratings yet
- RM-ST180 Jan 2021Document2 pagesRM-ST180 Jan 2021Jorge Rodriguez AlvaradoNo ratings yet
- EH-SolutionsLibrary 999902104 1Document16 pagesEH-SolutionsLibrary 999902104 1Alfonso Lopez toroNo ratings yet
- Delta DVP Series CatalogDocument52 pagesDelta DVP Series CatalogAlfonso Lopez toroNo ratings yet
- Workshop Manual Thermo DW 300Document98 pagesWorkshop Manual Thermo DW 300kumbrovNo ratings yet
- Yanmar Co., LTD.: Downloaded From Manuals Search EngineDocument6 pagesYanmar Co., LTD.: Downloaded From Manuals Search EngineJohn GarnetNo ratings yet
- BA SC600 MarcoPolo Busdriver EN 2018 11 DOK30620Document12 pagesBA SC600 MarcoPolo Busdriver EN 2018 11 DOK30620Alfonso Lopez toroNo ratings yet
- Js 6000Document48 pagesJs 6000Alfonso Lopez toroNo ratings yet
- Sauer DanFoss Joystick Catalog PDFDocument40 pagesSauer DanFoss Joystick Catalog PDFMMM-MMMNo ratings yet
- AMX 226224 E ManualDocument32 pagesAMX 226224 E ManualAlfonso Lopez toroNo ratings yet
- Js 6000Document16 pagesJs 6000Alfonso Lopez toroNo ratings yet
- B 813644 A 0Document60 pagesB 813644 A 0Alfonso Lopez toroNo ratings yet
- js6000 520l0722 WebDocument2 pagesjs6000 520l0722 WebAlfonso Lopez toroNo ratings yet
- R00 Setup+WEBSer UG EN V1Document42 pagesR00 Setup+WEBSer UG EN V1Alfonso Lopez toroNo ratings yet
- ACT350PoweCell UG EN 10.2017 V1Document52 pagesACT350PoweCell UG EN 10.2017 V1Alfonso Lopez toroNo ratings yet
- FX Series Programmable Controllers: User'S Manual Hardware EditionDocument532 pagesFX Series Programmable Controllers: User'S Manual Hardware EditionAlfonso Lopez toroNo ratings yet
- 999-901-857 CANpointQSG ENDocument22 pages999-901-857 CANpointQSG ENAlfonso Lopez toroNo ratings yet
- FK3u Analog 485Document18 pagesFK3u Analog 485Vitex Ascensores GaliciaNo ratings yet
- MITSUBISHI - FX3GFX3U Programming Manual - Basic Applied Instructions EditionDocument944 pagesMITSUBISHI - FX3GFX3U Programming Manual - Basic Applied Instructions Editionjulio perezNo ratings yet
- Device 12 Connection GuideDocument4 pagesDevice 12 Connection Guidejulian andres rojasNo ratings yet
- 03 MAN D2Z2IM ACT350xx ENDocument24 pages03 MAN D2Z2IM ACT350xx ENAlfonso Lopez toroNo ratings yet
- R04 Man Act350 Ug enDocument74 pagesR04 Man Act350 Ug enAlfonso Lopez toroNo ratings yet
- Description and Operation: Component Maintenance ManualDocument8 pagesDescription and Operation: Component Maintenance ManualLou Parker100% (1)
- Billing Invoice Payment PlanDocument7 pagesBilling Invoice Payment PlanyogeshNo ratings yet
- Microsoft Testking 70-764 v2019-02-01 by Henry 170qDocument208 pagesMicrosoft Testking 70-764 v2019-02-01 by Henry 170qMuthu Raman ChinnaduraiNo ratings yet
- Chapter 6-Sensors-Different Types of SensorsDocument23 pagesChapter 6-Sensors-Different Types of SensorsbettyNo ratings yet
- FLS DemonstrationDocument30 pagesFLS DemonstrationLeah UljerNo ratings yet
- Part - 05 Join An Additional Ubuntu DC To Samba4 AD DCDocument17 pagesPart - 05 Join An Additional Ubuntu DC To Samba4 AD DCSujit KumarNo ratings yet
- SSS Format DescriptionDocument5 pagesSSS Format Descriptionmartinos22No ratings yet
- Oed 2,0 2022Document139 pagesOed 2,0 2022Ellish ErisNo ratings yet
- Sap PP Interview QuestionDocument55 pagesSap PP Interview QuestionkumarNo ratings yet
- Ict111 Module 02Document7 pagesIct111 Module 02Cluster 2, Cebu city, Josh C AgustinNo ratings yet
- ICT158 Workshop 7Document2 pagesICT158 Workshop 7Jaya MathiNo ratings yet
- Incentive Week 23-24Document12 pagesIncentive Week 23-24Pratiksha KumariNo ratings yet
- Winsteps ManualDocument615 pagesWinsteps Manualandresote33100% (1)
- 3 Months Look Ahead PlanDocument6 pages3 Months Look Ahead PlananjnaNo ratings yet
- BNB List 3742Document443 pagesBNB List 3742Walter MatsudaNo ratings yet
- 04 SQLQueriesDocument18 pages04 SQLQueriescccc gggg oooNo ratings yet
- Write For Us Digital MarketingDocument6 pagesWrite For Us Digital MarketingSumit PrajapatiNo ratings yet
- OAF TrainiingDocument23 pagesOAF TrainiingCoral Shiny0% (1)
- 4 - Global Optimization For Bus Line Timetable Setting ProblemDocument10 pages4 - Global Optimization For Bus Line Timetable Setting ProblemBaran BaranyNo ratings yet
- Lecture - 5: DC-AC Converters: Ug - ProgramDocument54 pagesLecture - 5: DC-AC Converters: Ug - ProgramArife AbdulkerimNo ratings yet
- AOPEN DEV8430 Preliminary DatasheetDocument2 pagesAOPEN DEV8430 Preliminary DatasheetMarisa García CulpiánNo ratings yet
- Simple Way To Load Small Chunks of Data As You Scroll in Angular - by Ramya Balasubramanian - Geek Culture - Oct, 2021 - MediumDocument9 pagesSimple Way To Load Small Chunks of Data As You Scroll in Angular - by Ramya Balasubramanian - Geek Culture - Oct, 2021 - MediumRanjana PatilNo ratings yet
- Electronic Inspection Data Management PDFDocument9 pagesElectronic Inspection Data Management PDFUdinHermansyahNo ratings yet
- GUIDDocument215 pagesGUIDPrakashNo ratings yet
- Transportation Model Optimization With MODI MethodDocument2 pagesTransportation Model Optimization With MODI Methodhello_khayNo ratings yet
- Jean Abreu CVDocument3 pagesJean Abreu CVABREUNo ratings yet
- To Call A Function From BI PublisherDocument6 pagesTo Call A Function From BI PublisherbalasukNo ratings yet
- Fourier Series: Yi Cheng Cal Poly PomonaDocument46 pagesFourier Series: Yi Cheng Cal Poly PomonaJesusSQANo ratings yet
- City of Sedona - Wireless Master PlanDocument136 pagesCity of Sedona - Wireless Master Plana hNo ratings yet
- SAP SRM 7.0 Strategic SourcingDocument90 pagesSAP SRM 7.0 Strategic SourcingSergio Martinez PerezNo ratings yet