You might also like
- Functions Papst Paper 2Document19 pagesFunctions Papst Paper 2Zayd Ahmad SyedNo ratings yet
- Mathematical Modeling of Fluid SystemsDocument10 pagesMathematical Modeling of Fluid Systemsabdullah HRB100% (1)
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- Chemistry For Grade 10 BookDocument3 pagesChemistry For Grade 10 BookHollyNo ratings yet
- On The Constitution of The Human Being-1Document431 pagesOn The Constitution of The Human Being-1Wisdom34100% (4)
- Delay Differential Equation PDFDocument349 pagesDelay Differential Equation PDFVAIBHAV DHAR DWIVEDINo ratings yet
- Digital ContDocument6 pagesDigital ContshakeelaNo ratings yet
- ENGM541 Lab7Document9 pagesENGM541 Lab7moooo yii trrhjNo ratings yet
- DCS AssignmentsDocument11 pagesDCS AssignmentsRavi TejaNo ratings yet
- Terminal - Exam - Section 4A-4B - Signal & System FA14 COMSATDocument3 pagesTerminal - Exam - Section 4A-4B - Signal & System FA14 COMSATAli RazaNo ratings yet
- (2015-01-09) - Terminal - Exam - Section4A-4B - Signal & System FA14 PDFDocument3 pages(2015-01-09) - Terminal - Exam - Section4A-4B - Signal & System FA14 PDFZulqarnain KhanNo ratings yet
- MT1186 Chapter 5 Function of Several VariablesDocument42 pagesMT1186 Chapter 5 Function of Several VariablesPeterParker1983No ratings yet
- (Maa 2.16) Symmetries of Functions - More TransformationsDocument20 pages(Maa 2.16) Symmetries of Functions - More TransformationsAditya SharmaNo ratings yet
- Laplace Transformation Umer Asghar Method PDFDocument36 pagesLaplace Transformation Umer Asghar Method PDFSikandar Khan100% (3)
- Section A - Answer Question 1 (Compulsory) and Five Other Questions. Section B & Section C - Answer Two Questions From Either Section B or Section CDocument6 pagesSection A - Answer Question 1 (Compulsory) and Five Other Questions. Section B & Section C - Answer Two Questions From Either Section B or Section CsekharbhattaNo ratings yet
- Assignment IDocument2 pagesAssignment Iمشاهير celebritiesNo ratings yet
- Gordon Modal MethodsDocument15 pagesGordon Modal MethodsdipietrovNo ratings yet
- Solution of Mechanical System Vertical Vibration Using MATLAB/Simulink ProgramDocument1 pageSolution of Mechanical System Vertical Vibration Using MATLAB/Simulink ProgramtierradiegoyahooesNo ratings yet
- TA Day1Document6 pagesTA Day1Nguyễn KhimNo ratings yet
- Control Systems Sem II Pattern 2020 Endsem Exam May 2023 - ETCDocument2 pagesControl Systems Sem II Pattern 2020 Endsem Exam May 2023 - ETCradhika.22210203No ratings yet
- Lab 1-Introduction To MatlabDocument8 pagesLab 1-Introduction To MatlabBatool HerzallahNo ratings yet
- Matlab Notes For Calculus 2: Lia VasDocument12 pagesMatlab Notes For Calculus 2: Lia VasjojonNo ratings yet
- UJ - Control - Semester Test#1 - 13 Sep - 2022Document6 pagesUJ - Control - Semester Test#1 - 13 Sep - 2022Dimakatso NgobeniNo ratings yet
- M34 Many Graphs From One - Div3 - 189 - 1705199799Document7 pagesM34 Many Graphs From One - Div3 - 189 - 1705199799NoraNo ratings yet
- HW No 2. February 26, 2017.docx SolutionDocument4 pagesHW No 2. February 26, 2017.docx SolutionkhalidNo ratings yet
- Ctrl. (SH.1)Document2 pagesCtrl. (SH.1)nostalgia.awyNo ratings yet
- Gned03 Chapter 2 Part 3relation and FunctionDocument9 pagesGned03 Chapter 2 Part 3relation and FunctionCyhra Diane MabaoNo ratings yet
- Exam1soln E12 (04-1)Document7 pagesExam1soln E12 (04-1)borsacidayi06No ratings yet
- 2018 April EE307-B - Ktu QbankDocument2 pages2018 April EE307-B - Ktu QbankAdithya Kumar M SNo ratings yet
- Thapathali Campus: Subject:-Control SystemDocument2 pagesThapathali Campus: Subject:-Control Systemjagat bhusalNo ratings yet
- MTH 112 Function and GeomentryDocument68 pagesMTH 112 Function and GeomentryMoluno Sarah100% (1)
- Lecture Notes On Fundamentals of Vector SpacesDocument30 pagesLecture Notes On Fundamentals of Vector SpaceschandrahasNo ratings yet
- 1050 Text GTDocument17 pages1050 Text GTmynameisgookNo ratings yet
- Problem Sheet On Discrete Time SystemDocument5 pagesProblem Sheet On Discrete Time SystemSourav PradhanNo ratings yet
- Coinduccion y CorrecursionDocument50 pagesCoinduccion y CorrecursionalejandroamayarNo ratings yet
- Digital Assignment-2: Name: Havila Reddy Register No: 19BCT0211Document8 pagesDigital Assignment-2: Name: Havila Reddy Register No: 19BCT0211HAVILA REDDY D 19BCT0211No ratings yet
- Symbolic Computations in SagemathDocument25 pagesSymbolic Computations in SagemathLn Amitav BiswasNo ratings yet
- Cts 1 Specimen 2010Document9 pagesCts 1 Specimen 2010PRANJALSINGHNo ratings yet
- For More Model Sample Papers Visit:: MathematicsDocument6 pagesFor More Model Sample Papers Visit:: MathematicsRikuNo ratings yet
- Lecture Note Summer 19-20 PDFDocument8 pagesLecture Note Summer 19-20 PDFSaikat GhoshNo ratings yet
- Data Structure Questions and Answers For Freshers - SanfoundryDocument3 pagesData Structure Questions and Answers For Freshers - SanfoundryAwais RehmanNo ratings yet
- متعدد 2 التوزيع الشرطي المحاضره 6 PDFDocument6 pagesمتعدد 2 التوزيع الشرطي المحاضره 6 PDFMohammed AdelNo ratings yet
- Le Rabczuk Mai-Duy Tran-Cong CMES 2010 AVDocument32 pagesLe Rabczuk Mai-Duy Tran-Cong CMES 2010 AVRedouane RedaNo ratings yet
- Sách bài tập Giải tích Demidovich-trang-18-43Document26 pagesSách bài tập Giải tích Demidovich-trang-18-43xuansangtruongthi2201No ratings yet
- 1 Shapes of Cubic FunctionsDocument7 pages1 Shapes of Cubic FunctionsHuỳnh Thái ĐinhNo ratings yet
- Homework Assignment 2: NameDocument3 pagesHomework Assignment 2: NameFahd Ali ShifaNo ratings yet
- (2.4-2.5) COMPOSITION - INVERSE FUNCTION For IBDocument21 pages(2.4-2.5) COMPOSITION - INVERSE FUNCTION For IBacorn anNo ratings yet
- (MAA 2.4-2.5) COMPOSITION - INVERSE FUNCTION - EcoDocument11 pages(MAA 2.4-2.5) COMPOSITION - INVERSE FUNCTION - EcomimiNo ratings yet
- m4 - 2Document2 pagesm4 - 2Purna DhoniNo ratings yet
- Docs MTX CreationDocument2 pagesDocs MTX CreationJinu AugustineNo ratings yet
- Tapasaya Series OM SIR (Function & ITF)Document4 pagesTapasaya Series OM SIR (Function & ITF)Naba LmsmNo ratings yet
- State: The state of a dynamic system is the smallest set of variables, x ε RDocument8 pagesState: The state of a dynamic system is the smallest set of variables, x ε RKaushik SahaNo ratings yet
- Worksheet FunctionsDocument4 pagesWorksheet FunctionsvalerieNo ratings yet
- Winter07 Rosen ReflectionsDocument10 pagesWinter07 Rosen ReflectionsSourav SahaNo ratings yet
- (MAA 2.6) TRANSFORMATIONS - EcoDocument18 pages(MAA 2.6) TRANSFORMATIONS - EcomimiNo ratings yet
- Section 4.2: The Mean Value TheoremDocument5 pagesSection 4.2: The Mean Value TheoremMichael Sta BrigidaNo ratings yet
- Ch2QM PDFDocument26 pagesCh2QM PDFfractalgeoNo ratings yet
- 4.1 Fuzzy Inverse Model DevelopmentDocument30 pages4.1 Fuzzy Inverse Model DevelopmentVladimir StojanovićNo ratings yet
- StacksDocument37 pagesStacksShikhar AshishNo ratings yet
- 2003-Nov IB Maths Paper 2Document11 pages2003-Nov IB Maths Paper 2Gloria TaylorNo ratings yet
- DAA Final Examination 2003enDocument10 pagesDAA Final Examination 2003enGamindu UdayangaNo ratings yet
- January SL TestDocument89 pagesJanuary SL Testshaikhaali1004No ratings yet
- Standard Single Purpose Processors: PeripheralsDocument17 pagesStandard Single Purpose Processors: Peripheralskank1234No ratings yet
- ch3 - 102802 17032020 051549amDocument44 pagesch3 - 102802 17032020 051549amHamza AwanNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument29 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionLaxman RaoNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument39 pagesEmbedded Systems Design: A Unified Hardware/Software Introductionnandan_asNo ratings yet
- Jsan 02 00675Document25 pagesJsan 02 00675shakeelaNo ratings yet
- MS 104Document588 pagesMS 104ptgoNo ratings yet
- Combinatorial Geometry Course OutlineDocument6 pagesCombinatorial Geometry Course OutlineApple OcampoNo ratings yet
- Various Types of Sets: Finite SetDocument16 pagesVarious Types of Sets: Finite Setcykool_2kNo ratings yet
- Stochastic Programming - OptimizationDocument5 pagesStochastic Programming - Optimizationipsha_djNo ratings yet
- Finite Element Methods April May 2007 Question PaperDocument6 pagesFinite Element Methods April May 2007 Question PaperelimelekNo ratings yet
- GR 9 Two Step Equations ANSWERSDocument2 pagesGR 9 Two Step Equations ANSWERSRudyr BacolodNo ratings yet
- BASIC CALCULUS 5thDocument11 pagesBASIC CALCULUS 5thLaika LaiNo ratings yet
- G Power ManualDocument78 pagesG Power ManualLavinia Stupariu100% (1)
- Nozzle Total Flow Area (TFA)Document1 pageNozzle Total Flow Area (TFA)MarcoAntonioSerranoBazanNo ratings yet
- Aircraft's Equations of MotionDocument41 pagesAircraft's Equations of MotionRahis Pal SinghNo ratings yet
- Gen Physics 1 Module 1Document75 pagesGen Physics 1 Module 1Louise AlcaydeNo ratings yet
- 8 S1C1PO3 Rational & IrrationalDocument10 pages8 S1C1PO3 Rational & IrrationalLynnNo ratings yet
- Mathematical Creativity PDFDocument2 pagesMathematical Creativity PDFRohati CakNo ratings yet
- EE 307 Chapter 6 - Electrostatic Boundary Value ProblemsDocument34 pagesEE 307 Chapter 6 - Electrostatic Boundary Value ProblemsIzhar Ahmed NoohpotoNo ratings yet
- Advanced Econometrics: Masters ClassDocument24 pagesAdvanced Econometrics: Masters ClassBig LitresNo ratings yet
- תקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסDocument40 pagesתקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסRonNo ratings yet
- Nama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaDocument7 pagesNama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaAsnur SaputraNo ratings yet
- S1 Discrete Random VariablesDocument32 pagesS1 Discrete Random VariablesEvrika EducationNo ratings yet
- Mancova GuidanceDocument39 pagesMancova GuidancePhilemon NshimiyimanaNo ratings yet
- FM Core Pure Exam ADocument3 pagesFM Core Pure Exam AdsfafasdNo ratings yet
- Imaginary PhysicsDocument70 pagesImaginary PhysicsesotecNo ratings yet
- Mat 1512 (Calculus A)Document169 pagesMat 1512 (Calculus A)Anonymous 7TSpgrU100% (1)
- Sant Tukaram National Model, Latur.: Chapter-7.2 Add and Subtract TimeDocument3 pagesSant Tukaram National Model, Latur.: Chapter-7.2 Add and Subtract TimeAbhay DaithankarNo ratings yet
- Robot 1Document5 pagesRobot 1spamakutaNo ratings yet
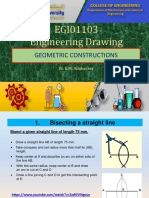
- 3 Geometric ConstructionsDocument12 pages3 Geometric ConstructionsRashid AlmaktoumiNo ratings yet
- MATHDocument10 pagesMATHzxcvuno4307100% (2)