You might also like
- Permeable Pavements REPORTDocument37 pagesPermeable Pavements REPORTaparna100% (10)
- IJETR021664Document5 pagesIJETR021664erpublicationNo ratings yet
- Image Space Trajectory Tracking of 6-DOF Robot Manipulator in Assisting Visual ServoingDocument18 pagesImage Space Trajectory Tracking of 6-DOF Robot Manipulator in Assisting Visual ServoingmaameriNo ratings yet
- Week1 NterviewDocument31 pagesWeek1 NterviewVignesh RenganathNo ratings yet
- Roboscan: A Combined 2D and 3D Vision System For Improved Speed and Flexibility in Pick-And-Place OperationDocument16 pagesRoboscan: A Combined 2D and 3D Vision System For Improved Speed and Flexibility in Pick-And-Place OperationCarlos SosaNo ratings yet
- Automatic Robot Hand-Eye Calibration Enabled by Learning-Based 3D VisionDocument24 pagesAutomatic Robot Hand-Eye Calibration Enabled by Learning-Based 3D VisionAFTABNo ratings yet
- Vision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDocument5 pagesVision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDRathikaNo ratings yet
- Dynamic Path Tracking of Industrial RobotsDocument12 pagesDynamic Path Tracking of Industrial RobotsConway MartinezNo ratings yet
- A Review On AI Vision Robotic Arm Using Raspberry PiDocument7 pagesA Review On AI Vision Robotic Arm Using Raspberry PiIJRASETPublicationsNo ratings yet
- Ijreiss 3094 97729Document13 pagesIjreiss 3094 97729ZEUS GAMINGNo ratings yet
- Joystick Controlled Industrial Robotic System With Robotic ArmDocument5 pagesJoystick Controlled Industrial Robotic System With Robotic ArmSanjeev KumarNo ratings yet
- Kothari 2017Document8 pagesKothari 2017NikitaNo ratings yet
- Vision Based Environment Recognition and Movement Control For Autonomous Wheeled Mobile RobotsDocument6 pagesVision Based Environment Recognition and Movement Control For Autonomous Wheeled Mobile RobotsMuhammad RenaldyNo ratings yet
- Learning Driven Coarse-to-Fine Articulated Robot TrackingDocument7 pagesLearning Driven Coarse-to-Fine Articulated Robot TrackingArun KumarNo ratings yet
- 1 DobotDocument4 pages1 Dobotrk krishnaNo ratings yet
- Nasa: Bergh 00 1190Document6 pagesNasa: Bergh 00 1190NASAdocumentsNo ratings yet
- 1 PBDocument7 pages1 PBFyndi Aw AwNo ratings yet
- A Tutorial On Visual Servo ControlDocument20 pagesA Tutorial On Visual Servo ControlAlberto NicolottiNo ratings yet
- Zebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingDocument16 pagesZebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingAndrej BašićNo ratings yet
- Path Planning of Mobile Robot Using ROSDocument8 pagesPath Planning of Mobile Robot Using ROSInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Conveyor Visual Tracking Using Robot Vision: April 2006Document6 pagesConveyor Visual Tracking Using Robot Vision: April 2006Duvan TamayoNo ratings yet
- Computers and Electronics in Agriculture: Ulrich Johan Isachsen, Theoharis Theoharis, Ekrem MisimiDocument8 pagesComputers and Electronics in Agriculture: Ulrich Johan Isachsen, Theoharis Theoharis, Ekrem MisimiRuben Dario SolarteNo ratings yet
- Results in Physics: SciencedirectDocument9 pagesResults in Physics: SciencedirectVishal PatilNo ratings yet
- Sensors On 3D DigitizationDocument19 pagesSensors On 3D DigitizationRajendra KumarNo ratings yet
- 15661-60323-1-PBDocument9 pages15661-60323-1-PBkelvinputrafurnitureNo ratings yet
- Design and Control of A Multiple-Section Continuum Robot With A Hybrid Sensing SystemDocument13 pagesDesign and Control of A Multiple-Section Continuum Robot With A Hybrid Sensing SystemDjedili AmelNo ratings yet
- Numerical Computation-Based Position Estimation FoDocument22 pagesNumerical Computation-Based Position Estimation FokarrenhueNo ratings yet
- R L Jalappa Institute of Technology: "Robotic Arm Controlled Using IOT Applications"Document15 pagesR L Jalappa Institute of Technology: "Robotic Arm Controlled Using IOT Applications"Gunavardhanareddy ChinnaNo ratings yet
- Final Report On Autonomous Mobile Robot NavigationDocument30 pagesFinal Report On Autonomous Mobile Robot NavigationChanderbhan GoyalNo ratings yet
- Sensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman FilterDocument22 pagesSensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman Filterxyz shahNo ratings yet
- SynopsisDocument17 pagesSynopsisMeha TiwariNo ratings yet
- Gaze Controlled Gun: AbstractDocument3 pagesGaze Controlled Gun: AbstracterpublicationNo ratings yet
- AR V O M I A A D: Eview of Isual Dometry Ethods and TS Pplications For Utonomous RivingDocument15 pagesAR V O M I A A D: Eview of Isual Dometry Ethods and TS Pplications For Utonomous Rivingcaner beldekNo ratings yet
- Visual Tracking and Control of A Quadcopter Using PDFDocument8 pagesVisual Tracking and Control of A Quadcopter Using PDFYovi Herlin SaputraNo ratings yet
- Robotvision 161023045752Document36 pagesRobotvision 161023045752leoNo ratings yet
- Object Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformDocument9 pagesObject Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformJesycaFuenmayorNo ratings yet
- Paper K Has 2014Document14 pagesPaper K Has 2014Selewa TimesNo ratings yet
- Implementation of An Object-Grasping Robot Arm Using Stereo Vision Measurement and Fuzzy ControlDocument13 pagesImplementation of An Object-Grasping Robot Arm Using Stereo Vision Measurement and Fuzzy ControlWikipedia.No ratings yet
- Monocular Visual SLAM With 256-Bit Encryption On UAVDocument7 pagesMonocular Visual SLAM With 256-Bit Encryption On UAVIJRASETPublicationsNo ratings yet
- CamodocalDocument9 pagesCamodocalherusyahputraNo ratings yet
- Wall-Following Using A Kinect Sensor For Corridor Coverage NavigationDocument6 pagesWall-Following Using A Kinect Sensor For Corridor Coverage NavigationRafiudin DarmawanNo ratings yet
- RoboSub 2021 Inst Teknologi Sepuluh Nopember TDRDocument10 pagesRoboSub 2021 Inst Teknologi Sepuluh Nopember TDRKuntjoro PinardiNo ratings yet
- Estimation of Disparity On Stereo Images in Android ApplicationDocument6 pagesEstimation of Disparity On Stereo Images in Android Applications imranNo ratings yet
- Camera Based Spectacles For Visually Impaired (Camspects)Document6 pagesCamera Based Spectacles For Visually Impaired (Camspects)GRD JournalsNo ratings yet
- 10 OnlineDocument8 pages10 OnlinearyanNo ratings yet
- Tapu A Smartphone-Based Obstacle 2013 ICCV Paper PDFDocument8 pagesTapu A Smartphone-Based Obstacle 2013 ICCV Paper PDFAlejandro ReyesNo ratings yet
- Fabricating A Completely Assemblable Robotic ArmDocument19 pagesFabricating A Completely Assemblable Robotic ArmshanthiniNo ratings yet
- Gesture Controlled Robot With Robotic ArmDocument10 pagesGesture Controlled Robot With Robotic ArmIJRASETPublicationsNo ratings yet
- A Smart Assistance System For Cable Assembly by Combining Wearable Augmented Reality With Portable Visual InspectionDocument16 pagesA Smart Assistance System For Cable Assembly by Combining Wearable Augmented Reality With Portable Visual InspectionJihen FouratiNo ratings yet
- 49-Optimal Grasping Strategy For Robots With A Parallel Gripper Based On Feature Sensing of 3D Object ModelDocument11 pages49-Optimal Grasping Strategy For Robots With A Parallel Gripper Based On Feature Sensing of 3D Object ModelHaider AliNo ratings yet
- Multi-Level Architecture For A Swarm of Surveillance RoversDocument13 pagesMulti-Level Architecture For A Swarm of Surveillance RoversIJRASETPublications100% (1)
- Camouflage Technique Based Multifunctional Army RobotDocument3 pagesCamouflage Technique Based Multifunctional Army RobotKarthik SNo ratings yet
- Parameshwaran 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012038Document11 pagesParameshwaran 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012038luanNo ratings yet
- Robotic Arm Thesis PDFDocument7 pagesRobotic Arm Thesis PDFNat Rice100% (2)
- Moving Vehicle Detection and Speed Measurement in Video Sequence IJERTV2IS100920Document4 pagesMoving Vehicle Detection and Speed Measurement in Video Sequence IJERTV2IS100920aniket wadheNo ratings yet
- Vo Based On Motion EstimationDocument5 pagesVo Based On Motion EstimationherusyahputraNo ratings yet
- 04-05-2021-1620114032-6-Ijme-4. Ijme - Vision Based Modelling of The Robotic Work CellDocument6 pages04-05-2021-1620114032-6-Ijme-4. Ijme - Vision Based Modelling of The Robotic Work Celliaset123No ratings yet
- Sensors 19 04111Document31 pagesSensors 19 04111Carlos CarlosNo ratings yet
- Activity10 VisionDocument3 pagesActivity10 VisionAlberto NicolottiNo ratings yet
- Human Follower Robot Using KinectDocument3 pagesHuman Follower Robot Using KinectZelalem kibru WoldieNo ratings yet
- Lantek Sharp Cut Cutting SoftwareDocument17 pagesLantek Sharp Cut Cutting SoftwareandonialbizulantekNo ratings yet
- (English) The Apple (سیب -) (1998) dir. Samira Makhmalbaf (DownSub.com)Document31 pages(English) The Apple (سیب -) (1998) dir. Samira Makhmalbaf (DownSub.com)玮魏No ratings yet
- Design and Fabrication of Small Scale Sugarcane Juice Extraction Using Solar PowerDocument4 pagesDesign and Fabrication of Small Scale Sugarcane Juice Extraction Using Solar PowerRahul RathodNo ratings yet
- Hb U9 S2.pptxDocument11 pagesHb U9 S2.pptxMaria Santos oportoNo ratings yet
- Army Specialised Subject SD SWDocument225 pagesArmy Specialised Subject SD SWRahul ChowdariNo ratings yet
- Cote D Ivoire TP5 2018Document28 pagesCote D Ivoire TP5 2018niruhtNo ratings yet
- Ee09 l07 Digital Control System Model QPDocument4 pagesEe09 l07 Digital Control System Model QPGīřïşh McNo ratings yet
- Release NotesDocument7 pagesRelease NotesZhen Yang ChuaNo ratings yet
- Special Events Management - ReportDocument28 pagesSpecial Events Management - ReportVincentAysonNo ratings yet
- Haryana General Knowledge 1650 + MCQs Previous Year Questions PDFDocument282 pagesHaryana General Knowledge 1650 + MCQs Previous Year Questions PDFDHUVADU JAGANATHAMNo ratings yet
- Vijeo Citect PDFDocument14 pagesVijeo Citect PDFtiagalNo ratings yet
- BureaucracyDocument19 pagesBureaucracyJohnNo ratings yet
- Employee Share SchemeDocument1 pageEmployee Share Schemerukhshan mahmoodNo ratings yet
- Lesson 2 Art Managers, Curators, Art Dealers, Art Buyers.: Pre-DiscussionDocument6 pagesLesson 2 Art Managers, Curators, Art Dealers, Art Buyers.: Pre-DiscussionMark Brian FloresNo ratings yet
- Punjab DefDocument8 pagesPunjab DefMangal RajakNo ratings yet
- UntitledDocument412 pagesUntitledUMAMI ROSANA MUKHSON IX.A.31100% (1)
- Game Development Tool EssentialsDocument201 pagesGame Development Tool EssentialsMayckon M. RebecciNo ratings yet
- Pressure Vessel Design PDFDocument107 pagesPressure Vessel Design PDFwahyu santoso100% (1)
- Maternal and Child Health Nursing Exam 2Document7 pagesMaternal and Child Health Nursing Exam 2Khryzzl VlsrNo ratings yet
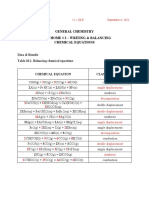
- General Chemistry Lab at Home # 2 - Writing & Balancing Chemical EquationsDocument3 pagesGeneral Chemistry Lab at Home # 2 - Writing & Balancing Chemical EquationsJayphet ChristianNo ratings yet
- Teaching Essay Writing To High School StudentsDocument8 pagesTeaching Essay Writing To High School Studentsafibavcbdyeqsx100% (2)
- Housing Management AssignmentDocument9 pagesHousing Management AssignmentCLIFFORD NYARKONo ratings yet
- AlSiC Composite in Engine Valve GuidesDocument9 pagesAlSiC Composite in Engine Valve GuidesSebastianAftanasăNo ratings yet
- Dust of Snow MCQDocument4 pagesDust of Snow MCQVaishu UparkarNo ratings yet
- 1 SHS DAILY LESSON LOG DLL TEMPLATE byDocument2 pages1 SHS DAILY LESSON LOG DLL TEMPLATE byARNIE BOCO100% (1)
- Glastic Utr Angles ChannelsDocument2 pagesGlastic Utr Angles Channelsdanielliram993No ratings yet
- Download full chapter Sin And Soil 12 1St Edition Anya Merchant 2 pdf docxDocument53 pagesDownload full chapter Sin And Soil 12 1St Edition Anya Merchant 2 pdf docxlou.kaywood807No ratings yet
- TC Electronic Polytune Clip Manual EnglishDocument14 pagesTC Electronic Polytune Clip Manual EnglishOrlandoSlavNo ratings yet
- DebateDocument4 pagesDebatesiddhant kohliNo ratings yet