You might also like
- 3Document6 pages3Samuel HamiltonNo ratings yet
- 11-Mechatronics Robot Navigation Using Machine Learning and AIDocument4 pages11-Mechatronics Robot Navigation Using Machine Learning and AIsanjayshelarNo ratings yet
- Base PapDocument6 pagesBase PapAnonymous ovq7UE2WzNo ratings yet
- 1 PBDocument7 pages1 PBFyndi Aw AwNo ratings yet
- Intelligent Mobility: Autonomous Outdoor Robotics at The DFKIDocument7 pagesIntelligent Mobility: Autonomous Outdoor Robotics at The DFKIFernando MartinezNo ratings yet
- 1 s2.0 S0921889016302512 MainDocument15 pages1 s2.0 S0921889016302512 Mainfaith_khp73301No ratings yet
- VCRA Improved.Document15 pagesVCRA Improved.adwait naikNo ratings yet
- Term Paper EE 105Document11 pagesTerm Paper EE 105shaktishoaibNo ratings yet
- Accelerometer-Based Control of An Industrial Robotic ArmDocument6 pagesAccelerometer-Based Control of An Industrial Robotic ArmsanjusanjanareddyNo ratings yet
- 2005 Path Planning Protocol For Collaborative Multi-Robot SystemsDocument6 pages2005 Path Planning Protocol For Collaborative Multi-Robot SystemsEx6TenZNo ratings yet
- SM3075Document15 pagesSM3075eir235dNo ratings yet
- Cooperative Robots Architecture For An Assistive ScenarioDocument2 pagesCooperative Robots Architecture For An Assistive ScenarioAndreaNo ratings yet
- Virtual Camera Perspectives Within A 3-D Interface For Robotic Search and RescueDocument5 pagesVirtual Camera Perspectives Within A 3-D Interface For Robotic Search and RescueVishu KumarNo ratings yet
- Imtc RobotNavigation 7594Document5 pagesImtc RobotNavigation 7594flv_91No ratings yet
- Isie 2012Document6 pagesIsie 2012rfm61No ratings yet
- A sEMG-Based Shared Control System With No-Target Obstacle Avoidance For Omnidirectional Mobile RobotsDocument11 pagesA sEMG-Based Shared Control System With No-Target Obstacle Avoidance For Omnidirectional Mobile Robotsabinaya_359109181No ratings yet
- Shadow RobotDocument29 pagesShadow Robotteentalksopedia100% (1)
- Introduction ..: Implementation of A Stereo Vision System For Visual Feedback Control of Robotic Arm ManipulationsDocument17 pagesIntroduction ..: Implementation of A Stereo Vision System For Visual Feedback Control of Robotic Arm Manipulationsmostafa elazabNo ratings yet
- WsRobotVision Gori Etal2013Document6 pagesWsRobotVision Gori Etal2013mounamalarNo ratings yet
- Object Handling in Cluttered Indoor Environment With A Mobile ManipulatorDocument6 pagesObject Handling in Cluttered Indoor Environment With A Mobile ManipulatorSomeone LolNo ratings yet
- Teleoperation of Humanoid Motion Using 3G Communication NetworkDocument6 pagesTeleoperation of Humanoid Motion Using 3G Communication NetworkDr Awais YasinNo ratings yet
- A Method of Indoor Mobile Robot Navigation by Using ControlDocument6 pagesA Method of Indoor Mobile Robot Navigation by Using ControlengrodeNo ratings yet
- Wall-Following Using A Kinect Sensor For Corridor Coverage NavigationDocument6 pagesWall-Following Using A Kinect Sensor For Corridor Coverage NavigationRafiudin DarmawanNo ratings yet
- Navigation For An Intelligent Mobile RobotDocument11 pagesNavigation For An Intelligent Mobile RobotOnkar ViralekarNo ratings yet
- Collision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua LiangDocument6 pagesCollision Avoidance in Multi-Robot Systems: Chengtao Cai and Chunsheng Yang Qidan Zhu and Yanhua Liangshyam SaravananNo ratings yet
- Mobile Robots For Search and Rescue: Niramon Ruangpayoongsak Hubert Roth Jan ChudobaDocument6 pagesMobile Robots For Search and Rescue: Niramon Ruangpayoongsak Hubert Roth Jan ChudobaNemitha LakshanNo ratings yet
- Final Report On Autonomous Mobile Robot NavigationDocument30 pagesFinal Report On Autonomous Mobile Robot NavigationChanderbhan GoyalNo ratings yet
- Computers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentDocument15 pagesComputers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentsowNo ratings yet
- Integration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideDocument5 pagesIntegration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideandreNo ratings yet
- Wireless Robot Control With Robotic Arm Using Mems and ZigbeeDocument5 pagesWireless Robot Control With Robotic Arm Using Mems and ZigbeeCh RamanaNo ratings yet
- Automatic Generation of Control Programs For Walking Robots Using Genetic ProgrammingDocument10 pagesAutomatic Generation of Control Programs For Walking Robots Using Genetic ProgrammingManju PriyaNo ratings yet
- FinalYearProjectExecutiveSummary 2012Document41 pagesFinalYearProjectExecutiveSummary 2012Syahmi AzharNo ratings yet
- Removed PapersDocument6 pagesRemoved Papersghulam mohi ud dinNo ratings yet
- Implementation of Visionbased Autonomous Mobile Platform To Cont 2018Document6 pagesImplementation of Visionbased Autonomous Mobile Platform To Cont 2018tou kaiNo ratings yet
- Automated Navigation Using Snake-Like RobotDocument6 pagesAutomated Navigation Using Snake-Like RobotAfzal AhmadNo ratings yet
- High-Level Programming and Control For Industrial Robotics: Using A Hand-Held Accelerometer-Based Input Device For Gesture and Posture RecognitionDocument21 pagesHigh-Level Programming and Control For Industrial Robotics: Using A Hand-Held Accelerometer-Based Input Device For Gesture and Posture RecognitionIvan TrubeljaNo ratings yet
- Mobile Robot Obstacle Avoidance in Labyrinth Environment Using Fuzzy Logic ApproachDocument5 pagesMobile Robot Obstacle Avoidance in Labyrinth Environment Using Fuzzy Logic ApproachHarsha Vardhan BaleNo ratings yet
- PT Engleza (Trebuie Tradus Tot)Document10 pagesPT Engleza (Trebuie Tradus Tot)Spring ReportNo ratings yet
- Indoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter To Fuse The Data of Gyroscope and MagnetometerDocument12 pagesIndoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter To Fuse The Data of Gyroscope and MagnetometerWheel ChairNo ratings yet
- Path Planning of Mobile Robot Using ROSDocument8 pagesPath Planning of Mobile Robot Using ROSInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Development of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotDocument9 pagesDevelopment of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotIAES International Journal of Robotics and AutomationNo ratings yet
- Object Distance MeasuremetnDocument22 pagesObject Distance MeasuremetnRavi ChanderNo ratings yet
- Robot Control ThesisDocument5 pagesRobot Control Thesisafloaaffbkmmbx100% (1)
- Bet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Document20 pagesBet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Abhay BhujNo ratings yet
- 1I11-IJAET1111203 Novel 3dDocument12 pages1I11-IJAET1111203 Novel 3dIJAET JournalNo ratings yet
- Feature Extraction For Autonomous Ro Bot Navigation in Urban Environme NtsDocument8 pagesFeature Extraction For Autonomous Ro Bot Navigation in Urban Environme NtsDouglas IsraelNo ratings yet
- FYP Review PaperDocument6 pagesFYP Review PaperMatthew MontebelloNo ratings yet
- Gesture Controlled Robot With Robotic ArmDocument10 pagesGesture Controlled Robot With Robotic ArmIJRASETPublicationsNo ratings yet
- A Modular Control Architecture For Semi-Autonomous NavigationDocument4 pagesA Modular Control Architecture For Semi-Autonomous NavigationKai GustavNo ratings yet
- Ijett V14P237 PDFDocument4 pagesIjett V14P237 PDFRahul RajNo ratings yet
- JETIRFA06001Document5 pagesJETIRFA06001Trần ĐạtNo ratings yet
- Integrated Image Processing and Path Planning For Robotic SketchingDocument6 pagesIntegrated Image Processing and Path Planning For Robotic SketchingĐào Văn HưngNo ratings yet
- Three Axis Kinematics Study For Motion Capture Using Augmented RealityDocument37 pagesThree Axis Kinematics Study For Motion Capture Using Augmented RealityINNOVATIVE COMPUTING REVIEWNo ratings yet
- Automatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionFrom EverandAutomatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionNo ratings yet
- A User Interface For Assistive Grasping: Jonathan Weisz, Carmine Elvezio, and Peter K. AllenDocument6 pagesA User Interface For Assistive Grasping: Jonathan Weisz, Carmine Elvezio, and Peter K. AllenBmn85No ratings yet
- Human Pose Estimation Using Superpixels and SVM ClassifierDocument18 pagesHuman Pose Estimation Using Superpixels and SVM ClassifierNikitaNo ratings yet
- Articulated Body Pose Estimation: Unlocking Human Motion in Computer VisionFrom EverandArticulated Body Pose Estimation: Unlocking Human Motion in Computer VisionNo ratings yet
- Visual Sensor Network: Exploring the Power of Visual Sensor Networks in Computer VisionFrom EverandVisual Sensor Network: Exploring the Power of Visual Sensor Networks in Computer VisionNo ratings yet
- Name PlateDocument8 pagesName Platerk krishnaNo ratings yet
- Skill Development CentreDocument2 pagesSkill Development Centrerk krishnaNo ratings yet
- Add Lab EquipmentsDocument2 pagesAdd Lab Equipmentsrk krishnaNo ratings yet
- Free EnergyDocument12 pagesFree Energyrk krishnaNo ratings yet
- The RoleDocument3 pagesThe Rolerk krishnaNo ratings yet
- PneumaticsDocument7 pagesPneumaticsrk krishnaNo ratings yet
- Pipe Friction 1Document3 pagesPipe Friction 1rk krishnaNo ratings yet
- Aravind Unit 2Document37 pagesAravind Unit 2rk krishnaNo ratings yet
- Centrifugal PumpDocument4 pagesCentrifugal Pumprk krishnaNo ratings yet
- SAU1603 Automotive Safety: School of Mechanical Engineering Department of Automobile EngineeringDocument59 pagesSAU1603 Automotive Safety: School of Mechanical Engineering Department of Automobile Engineeringrk krishnaNo ratings yet
- 2 - VenturimeterDocument4 pages2 - Venturimeterrk krishnaNo ratings yet
- Chemistry April 15Document3 pagesChemistry April 15rk krishnaNo ratings yet
- Bernoullis TheoremDocument5 pagesBernoullis Theoremrk krishnaNo ratings yet
- ADV Communication Skills LAB QPDocument4 pagesADV Communication Skills LAB QPrk krishnaNo ratings yet
- Kom QB (R20)Document6 pagesKom QB (R20)rk krishnaNo ratings yet
- SM Instruction Guide With Screenshots SLED Self MaintainerDocument5 pagesSM Instruction Guide With Screenshots SLED Self MaintainerNoel MendozaNo ratings yet
- Bayer Clinitek-500-Operator-Manual PDFDocument77 pagesBayer Clinitek-500-Operator-Manual PDFSergio Iván CasillasNo ratings yet
- Catalogo Lowara DomoDocument6 pagesCatalogo Lowara DomoSergio ZegarraNo ratings yet
- Ebook Sobotta Atlas of Anatomy Vol 1 General Anatomy and Musculoskeletal System English Latin16Th Ed PDF Full Chapter PDFDocument68 pagesEbook Sobotta Atlas of Anatomy Vol 1 General Anatomy and Musculoskeletal System English Latin16Th Ed PDF Full Chapter PDFkarren.brown188100% (25)
- MBA Project Report of DY Patil Distance MBADocument4 pagesMBA Project Report of DY Patil Distance MBAPrakashB144No ratings yet
- Endodontic and Restorative Management of A Lower Molar With A Calcified Pulp Chamber.Document7 pagesEndodontic and Restorative Management of A Lower Molar With A Calcified Pulp Chamber.Nicolas SantanderNo ratings yet
- Milk Production Trend - Dairy Development - Outlook PDFDocument10 pagesMilk Production Trend - Dairy Development - Outlook PDFrubel_nsuNo ratings yet
- Human Activities Notes For Form TwoDocument3 pagesHuman Activities Notes For Form TwoedwinmasaiNo ratings yet
- Decision Tree PrimerDocument42 pagesDecision Tree PrimerMuzzamil JanjuaNo ratings yet
- Federico Giusfredi - Syntax of The Luwian LanguageDocument229 pagesFederico Giusfredi - Syntax of The Luwian LanguageLucySky7No ratings yet
- Manual Ga Ma785gt Ud3hDocument104 pagesManual Ga Ma785gt Ud3htrasviviNo ratings yet
- Sustainable Transportation and Electric VehiclesDocument17 pagesSustainable Transportation and Electric Vehicless131744No ratings yet
- Anh 7 Cum 1 (2017-2018)Document6 pagesAnh 7 Cum 1 (2017-2018)anhthunoban2011No ratings yet
- CH 1 MCQ ETIDocument14 pagesCH 1 MCQ ETIShlok PurohitNo ratings yet
- Imanager U2000 ME Release Notes 01 PDFDocument180 pagesImanager U2000 ME Release Notes 01 PDFCamilo Andres OrozcoNo ratings yet
- Mathematical LanguageDocument9 pagesMathematical Languagejrqagua00332No ratings yet
- Settlement Chart: Foundation Settlement Analysis - ElasticDocument2 pagesSettlement Chart: Foundation Settlement Analysis - ElasticCSEC Uganda Ltd.No ratings yet
- NewJaisa Corporate ProfileDocument14 pagesNewJaisa Corporate ProfileCRAZY ಕನ್ನಡಿಗNo ratings yet
- For Students ModuleDocument44 pagesFor Students ModuleJohn vincent VellezaNo ratings yet
- Detailed Lesson PlanDocument10 pagesDetailed Lesson PlanNyca PostradoNo ratings yet
- Comparative and Superlative Adjectives Fun Activities Games Grammar Guides 10529Document14 pagesComparative and Superlative Adjectives Fun Activities Games Grammar Guides 10529Nhung Mai ThịNo ratings yet
- Statistics With The Ti-83 Plus (And Silver Edition) : Edit (1) 1:edit 5:setupeditor ProtDocument10 pagesStatistics With The Ti-83 Plus (And Silver Edition) : Edit (1) 1:edit 5:setupeditor ProtkkathrynannaNo ratings yet
- Zachary Evans ResumeDocument2 pagesZachary Evans Resumeapi-248576943No ratings yet
- Wound Repair and RegenerationDocument8 pagesWound Repair and RegenerationdrsamnNo ratings yet
- Rocna and Vulcan Anchor DimensionsDocument2 pagesRocna and Vulcan Anchor DimensionsJoseph PintoNo ratings yet
- Panasonic SC BT200Document60 pagesPanasonic SC BT200Mark CoatesNo ratings yet
- 731 Mitendra Pratap SinghDocument2 pages731 Mitendra Pratap Singhmitendra pratap singhNo ratings yet
- Vietnam Maritime UniversityDocument36 pagesVietnam Maritime UniversitySơn BáchNo ratings yet
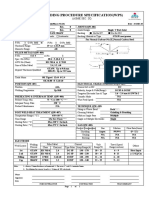
- Welding Procedure Specification (WPS) : (Asme Sec. Ix)Document1 pageWelding Procedure Specification (WPS) : (Asme Sec. Ix)Ahmed Lepda100% (1)
- BCA Syllabus 2016-17 CBCS RevisedDocument83 pagesBCA Syllabus 2016-17 CBCS Revisedmalliknl50% (2)