You might also like
- 6 Search Algorithms2Document58 pages6 Search Algorithms2391010451No ratings yet
- Informed (Heuristic) Search Strategies: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocument28 pagesInformed (Heuristic) Search Strategies: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINo ratings yet
- chp03 Searching StrategiesDocument43 pageschp03 Searching StrategiesAbdulhadi Abubakar JihadNo ratings yet
- 09 Informed SearchDocument18 pages09 Informed SearchryanNo ratings yet
- Heuristic SearchDocument30 pagesHeuristic SearchKavi ShettyNo ratings yet
- HSS @AzDOCUMENTS - inDocument44 pagesHSS @AzDOCUMENTS - inBhavana NagarajNo ratings yet
- Ut - 1 - T - 3 Heuristic SearchDocument21 pagesUt - 1 - T - 3 Heuristic SearchDhivya Bharathi pNo ratings yet
- 21/10/04 AIPP Lecture 9: Informed Search Strategies 1Document48 pages21/10/04 AIPP Lecture 9: Informed Search Strategies 1TANVI78No ratings yet
- Session 5Document19 pagesSession 5Rohan GanjiNo ratings yet
- Cse-3201 (Ai - 06)Document43 pagesCse-3201 (Ai - 06)mna shourovNo ratings yet
- 09 Informed SearchDocument18 pages09 Informed SearchTeddy MwangiNo ratings yet
- 09 Informed SearchDocument17 pages09 Informed SearchRizwan UllahNo ratings yet
- Lecture06 Informed Search (Part 2)Document34 pagesLecture06 Informed Search (Part 2)Dream MakerNo ratings yet
- HeuristicsDocument14 pagesHeuristicsazarNo ratings yet
- AiinsemDocument25 pagesAiinsemKartik gaikwadNo ratings yet
- Unit - 1Document20 pagesUnit - 1Riya jainNo ratings yet
- Last Time: Breadth-First Search Solution Depth-First Search SolutionDocument86 pagesLast Time: Breadth-First Search Solution Depth-First Search SolutionJean-yves LapicqueNo ratings yet
- AI Lecture 9-10Document34 pagesAI Lecture 9-10Mohammad BangeeNo ratings yet
- Module 1-A - AlgorithmDocument34 pagesModule 1-A - AlgorithmVijay Sathvika BNo ratings yet
- MODULE - 3 Solved (11) PDFDocument17 pagesMODULE - 3 Solved (11) PDFnida19sc115No ratings yet
- Ai Notes by MatinDocument7 pagesAi Notes by MatinMatin MullaNo ratings yet
- UNIT-2: Introduction To Searching Methods in AIDocument46 pagesUNIT-2: Introduction To Searching Methods in AIminNo ratings yet
- Heuristic SearchDocument63 pagesHeuristic Searchanushanallagasu851No ratings yet
- CH 4 - Informed SearchDocument58 pagesCH 4 - Informed Searchسجاد الحاجيNo ratings yet
- Unit 2Document55 pagesUnit 2randyyNo ratings yet
- III It Ci Unit 1Document28 pagesIII It Ci Unit 15049 preethi BaskaranNo ratings yet
- AI MID SEM SuggestionsDocument15 pagesAI MID SEM Suggestionslhub911No ratings yet
- Intelligence: AI: Think Humanily: Think Rationaily: Acting Humanily: Acting RationailyDocument6 pagesIntelligence: AI: Think Humanily: Think Rationaily: Acting Humanily: Acting RationailyzzselimahmedNo ratings yet
- AI NotesDocument43 pagesAI NotesAarthiNo ratings yet
- 1.3 Uninformed Search (AIML)Document30 pages1.3 Uninformed Search (AIML)Dogiparthi ManishaNo ratings yet
- Unit 2 Hill Climbing TechniquesDocument23 pagesUnit 2 Hill Climbing Techniquesharshita.sharma.phd23No ratings yet
- Lecture4 (Search)Document32 pagesLecture4 (Search)MalikUbaidNo ratings yet
- Unit 2Document26 pagesUnit 2skraoNo ratings yet
- Lecture5 - Informed SearchDocument21 pagesLecture5 - Informed SearchShahd Abd ElsameaNo ratings yet
- Unit 2 SeachingDocument77 pagesUnit 2 SeachingUI19EC21 Talluri issakuNo ratings yet
- Uninformed Search Strategies-20211124125231Document38 pagesUninformed Search Strategies-20211124125231Devin AnugrahNo ratings yet
- Informed SearchDocument13 pagesInformed SearchSaksham kumarNo ratings yet
- Artificial Intelligence CSL7540: (Based On The Courses From UCB, UW and IIT Delhi)Document174 pagesArtificial Intelligence CSL7540: (Based On The Courses From UCB, UW and IIT Delhi)Hritu RajNo ratings yet
- AI - Informed Search - Lecture 7, 8Document42 pagesAI - Informed Search - Lecture 7, 8samarNo ratings yet
- SR Questions Option1: Sheet1Document52 pagesSR Questions Option1: Sheet1Harshal ChaudharyNo ratings yet
- AI Imp QuestionsDocument33 pagesAI Imp Questionsumaimaaakhan0143No ratings yet
- Chapter 2 Search TechniquesDocument89 pagesChapter 2 Search Techniquesrahul.s221054101No ratings yet
- Ai-Unit-Ii NotesDocument77 pagesAi-Unit-Ii NotesCharan 'sNo ratings yet
- Module 3 Probem SolvingDocument64 pagesModule 3 Probem Solvingafrozbhati1111No ratings yet
- SearchingDocument4 pagesSearchingAqsa TaaNo ratings yet
- All Unit 2 Int 426Document48 pagesAll Unit 2 Int 426manishsingham1000No ratings yet
- Informed Search PDFDocument45 pagesInformed Search PDFakakakaNo ratings yet
- Aima 105Document1 pageAima 105Summer TriangleNo ratings yet
- 5th Sem 21CS54 AI Module2a Updated 1st Feb 2024Document201 pages5th Sem 21CS54 AI Module2a Updated 1st Feb 2024Kusuma KusumaNo ratings yet
- Search Algorithms in Artificial IntelligenceDocument5 pagesSearch Algorithms in Artificial Intelligenceobwani777No ratings yet
- Module 3 Ai Viva QuestionsDocument7 pagesModule 3 Ai Viva QuestionsRitika dwivediNo ratings yet
- AI Lecture 5 6 PDFDocument33 pagesAI Lecture 5 6 PDFJabin Akter JotyNo ratings yet
- 2.4-Informed Search Algorithms-060224Document10 pages2.4-Informed Search Algorithms-060224lakshyamittal2003No ratings yet
- Artificial Intelligence (UNIT - 2)Document53 pagesArtificial Intelligence (UNIT - 2)tusharNo ratings yet
- Chapter4 - Heuristic SearchDocument18 pagesChapter4 - Heuristic Searchayu5787No ratings yet
- Waleed Amir AI Assign 1Document10 pagesWaleed Amir AI Assign 1Waleed AmirNo ratings yet
- Question bank-AI-12-13-10144CS601Document30 pagesQuestion bank-AI-12-13-10144CS601Bhaskar Veeraraghavan100% (1)
- 4 Informed Search and ExplorationDocument6 pages4 Informed Search and ExplorationI CETNo ratings yet
- Lecture-3.1 Heuristic SearchDocument131 pagesLecture-3.1 Heuristic SearchmusaNo ratings yet
- Human Resource Management System AbstractDocument6 pagesHuman Resource Management System AbstractTelika Ramu100% (1)
- JIRA Dumps - Merged FullDocument28 pagesJIRA Dumps - Merged FullVijay KrishnanNo ratings yet
- Micro-Project Proposal (DCO 22322) Detailed Study of Bluetooth ConnectivityDocument2 pagesMicro-Project Proposal (DCO 22322) Detailed Study of Bluetooth ConnectivitySandesh Bhoi0% (1)
- 01 06 Plug and Play Deployment ConfigurationDocument11 pages01 06 Plug and Play Deployment ConfigurationAndrei StelmachNo ratings yet
- Introduction To The Theory of Computation: by Solomon Getachew 1Document17 pagesIntroduction To The Theory of Computation: by Solomon Getachew 1Lamesgn YigremNo ratings yet
- Content Indexing: PDF Created With Pdffactory Pro Trial VersionDocument24 pagesContent Indexing: PDF Created With Pdffactory Pro Trial Versionsorty300No ratings yet
- A Review Paper On E-Governance: Transforming Government: Annu Kumari (Research Scholar) Dr. Shailendra Narayan SinghDocument4 pagesA Review Paper On E-Governance: Transforming Government: Annu Kumari (Research Scholar) Dr. Shailendra Narayan SinghRajuNo ratings yet
- Electronics Thesis SampleDocument6 pagesElectronics Thesis Sampletracydolittlesalem100% (2)
- SQL VMs Perf Study DatasheetDocument2 pagesSQL VMs Perf Study DatasheetDubrav khanNo ratings yet
- OFFICE MANAGEMENT-noteDocument53 pagesOFFICE MANAGEMENT-notereem mazeeNo ratings yet
- Exercise 1:: (A. Decline B. Decrease C. Drop D. Improvement E. Reduction)Document2 pagesExercise 1:: (A. Decline B. Decrease C. Drop D. Improvement E. Reduction)Jon MickNo ratings yet
- Xpy 1280hd EngDocument2 pagesXpy 1280hd EngnormNo ratings yet
- PCI DSS v4 0 Hierachy 1648839354Document2 pagesPCI DSS v4 0 Hierachy 1648839354Darni BtmuchsinNo ratings yet
- UNIT2Document29 pagesUNIT2Evy LawNo ratings yet
- MYP Extended Math PDFDocument48 pagesMYP Extended Math PDFYuvaan BurakiaNo ratings yet
- Bernard EderDocument11 pagesBernard Ederkiran2710No ratings yet
- Chapter 13 Waiting Lines and Queuing Theory ModelsDocument35 pagesChapter 13 Waiting Lines and Queuing Theory Modelswaqasawan914No ratings yet
- Program (R)Document13 pagesProgram (R)hcbecbNo ratings yet
- Multi-Attribute Concept Design Procedure of A Generic Naval Vessel PDFDocument10 pagesMulti-Attribute Concept Design Procedure of A Generic Naval Vessel PDFjwpaprk1No ratings yet
- 1960 IMO Problems Number 2Document1 page1960 IMO Problems Number 2AdnanNo ratings yet
- Durgasoft - Python For Data Science Running NotesDocument300 pagesDurgasoft - Python For Data Science Running NotesSahir Khan100% (1)
- Srujana Putta - Power BI - ResumeDocument5 pagesSrujana Putta - Power BI - ResumeNikhil Reddy Namreddy100% (1)
- C - IBP - 2205 - SAP Certified Application Associate - SAP IBP For Supply Chain (2205)Document78 pagesC - IBP - 2205 - SAP Certified Application Associate - SAP IBP For Supply Chain (2205)Dipak BanerjeeNo ratings yet
- Draeger Fgds HSC V 2 BR 9108242 en UsDocument8 pagesDraeger Fgds HSC V 2 BR 9108242 en UsSimanjuntak JulpianNo ratings yet
- Internet of Things Application Using Tethered MSP430 To Thingspeak CloudDocument6 pagesInternet of Things Application Using Tethered MSP430 To Thingspeak CloudMichelle LlamatumbiNo ratings yet
- An Overview of The Ifudiumgo Earth Orbit (Leo) : LOW Satellite SystemDocument8 pagesAn Overview of The Ifudiumgo Earth Orbit (Leo) : LOW Satellite SystemEnrique MerinoNo ratings yet
- AWS NotesDocument81 pagesAWS NotesHUGUES ADDIH100% (1)
- FAEN 101: Algebra: Dr. Joseph K. AnsongDocument10 pagesFAEN 101: Algebra: Dr. Joseph K. Ansongnimdie jacksonNo ratings yet
- LERIS Professional Regulation CommissionDocument1 pageLERIS Professional Regulation CommissionAda R GuiandalNo ratings yet
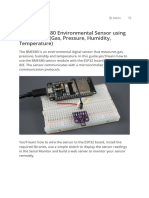
- ESP32: BME680 Environmental Sensor Using Arduino IDE (Gas, Pressure, Humidity, Temperature)Document31 pagesESP32: BME680 Environmental Sensor Using Arduino IDE (Gas, Pressure, Humidity, Temperature)Ayman AldarabieNo ratings yet