You might also like
- Client Server Architecture A Complete Guide - 2020 EditionFrom EverandClient Server Architecture A Complete Guide - 2020 EditionNo ratings yet
- C QuizDocument174 pagesC QuizKomal MishraNo ratings yet
- DSP Project 2Document10 pagesDSP Project 2Edu Daryl MacerenNo ratings yet
- Combined - Out Icai MCQDocument1,195 pagesCombined - Out Icai MCQShivaniNo ratings yet
- CS101 Mega File by Hamza PDFDocument184 pagesCS101 Mega File by Hamza PDFHFarooq MohammedNo ratings yet
- Structure of Java ProgramDocument25 pagesStructure of Java ProgramMuhammad AbdurrehmanNo ratings yet
- Unit 1Document120 pagesUnit 1Sweta KamatNo ratings yet
- Python QuizDocument99 pagesPython QuizPravin PoudelNo ratings yet
- PHP Mysql KVRDocument14 pagesPHP Mysql KVRsatishkvrNo ratings yet
- Java Questions and AnswersDocument26 pagesJava Questions and AnswersMohammedFikryNo ratings yet
- Core Java Interview Question and AnswersDocument39 pagesCore Java Interview Question and AnswersW_BhaveshNo ratings yet
- Java MCQDocument8 pagesJava MCQRevankar B R ShetNo ratings yet
- Tai Lieu PopDocument115 pagesTai Lieu PopBích Ngọc100% (1)
- CCENT100 105 - 248Q Sections 05 18Document161 pagesCCENT100 105 - 248Q Sections 05 18cissenar2002No ratings yet
- CS321 Computer ArchitectureDocument160 pagesCS321 Computer ArchitectureAnurag kumarNo ratings yet
- Algorith DatastructureDocument125 pagesAlgorith DatastructureNaveen KumarNo ratings yet
- Microprocessor & microcontroller introductionDocument20 pagesMicroprocessor & microcontroller introductionjeravi84No ratings yet
- Chapter 3 ASSEMBLY LANGUAGE PROGRAMMINGDocument122 pagesChapter 3 ASSEMBLY LANGUAGE PROGRAMMINGWann Fariera100% (1)
- 1-Introduction To Dynamic Web ContentDocument34 pages1-Introduction To Dynamic Web ContentRicky Noel Nabor Diancin Jr.No ratings yet
- Low Frequency Currents 1st BPT ChiragDocument221 pagesLow Frequency Currents 1st BPT ChiragchiragNo ratings yet
- Computer Science Textbook Solutions - 2Document30 pagesComputer Science Textbook Solutions - 2acc-expertNo ratings yet
- JAIIB Accounting Module B NotesDocument247 pagesJAIIB Accounting Module B NotesAkanksha MNo ratings yet
- Factors Affecting National IQDocument46 pagesFactors Affecting National IQRenzo ErmitañoNo ratings yet
- Artificial Intelligence (And Stupidity) in Computer GamesDocument118 pagesArtificial Intelligence (And Stupidity) in Computer GamesLars LidenNo ratings yet
- Computer ArchitectureDocument74 pagesComputer ArchitectureAkshat Singh100% (1)
- Web Design PrinciplesDocument24 pagesWeb Design Principlessevernaya BEANo ratings yet
- Topological Sort HomeworkDocument5 pagesTopological Sort Homeworkabhi74No ratings yet
- CnU 1&2Document114 pagesCnU 1&2Chip SIngle0% (1)
- Web Programming: Unit 1: Introduction To Dynamic WebsitesDocument15 pagesWeb Programming: Unit 1: Introduction To Dynamic WebsitesIwan SaputraNo ratings yet
- Nta Ugc Net KEY TO SUCCESS in Computer ScienceDocument61 pagesNta Ugc Net KEY TO SUCCESS in Computer SciencerenumathavNo ratings yet
- Business Case: Project DescriptionDocument2 pagesBusiness Case: Project DescriptionNibrazKhaldaNo ratings yet
- Design of Control UnitDocument19 pagesDesign of Control UnitArjun Nain100% (1)
- How to Use MySQL Database Management SystemDocument16 pagesHow to Use MySQL Database Management SystemKrrish KumarNo ratings yet
- Mobile Computing Viva Voce QuestionsDocument10 pagesMobile Computing Viva Voce QuestionsMohamed Rafi100% (1)
- Introduction To OOPS and C++Document48 pagesIntroduction To OOPS and C++Pooja AnjaliNo ratings yet
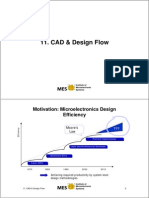
- CAD & Design Flow: Motivation: Microelectronics Design EfficiencyDocument18 pagesCAD & Design Flow: Motivation: Microelectronics Design EfficiencyJubin JainNo ratings yet
- 18CSC305J - Artificial Intelligence Unit IV Question Bank Part ADocument7 pages18CSC305J - Artificial Intelligence Unit IV Question Bank Part Aaxar kumarNo ratings yet
- JavaDocument149 pagesJavaMuthu KumNo ratings yet
- Mobile ComputingDocument13 pagesMobile ComputingHari KrishnaNo ratings yet
- Operating Systems (MCQ)Document26 pagesOperating Systems (MCQ)Mian Hasham Azhar AZHARNo ratings yet
- Merge SortDocument15 pagesMerge Sortapi-3825559No ratings yet
- Data Structure MCQ (Multiple Choice Questions) - SanfoundryDocument15 pagesData Structure MCQ (Multiple Choice Questions) - SanfoundryEzekiel JamesNo ratings yet
- Topological SortingDocument8 pagesTopological SortingGeorge fernandez.INo ratings yet
- 6.unit I 2 MarksDocument3 pages6.unit I 2 MarksprasanthprpNo ratings yet
- DBMS - Transactions ManagementDocument40 pagesDBMS - Transactions ManagementhariNo ratings yet
- PH.D - Computer Science - 2015Document17 pagesPH.D - Computer Science - 2015chalivendriNo ratings yet
- Raster Scan Graphics AlgorithmsDocument23 pagesRaster Scan Graphics AlgorithmskanchangawndeNo ratings yet
- COA Chapter 1 NotesDocument14 pagesCOA Chapter 1 NotesAmitesh ki class For engineeringNo ratings yet
- COA Unit-2Document40 pagesCOA Unit-2Pavan KumarNo ratings yet
- Electric CurrentDocument119 pagesElectric CurrentSM_Ing.No ratings yet
- DSA Knowledge in Problem Solving and Data StructuresDocument3 pagesDSA Knowledge in Problem Solving and Data StructuressampathaboNo ratings yet
- Unix Command Unit 1Document40 pagesUnix Command Unit 1रवींद्र नलावडेNo ratings yet
- READING TECHNIQUES: Five Step ApproachDocument2 pagesREADING TECHNIQUES: Five Step ApproachkwekynihamxyNo ratings yet
- Python QB SolutionDocument66 pagesPython QB Solution18cse137 navneetkumarshuklaNo ratings yet
- Lab Manual-Operating System Mtce-610aDocument104 pagesLab Manual-Operating System Mtce-610aapi-305955686100% (1)
- Ece V Digital Signal Processing (10ec52) NotesDocument161 pagesEce V Digital Signal Processing (10ec52) NotesDenise Nelson100% (1)
- Shan Masala IN Bangladesh: Group Members Abdul Taiyeb 5780 Ayaz Dawood Rashid Sheikh Zubair KurdDocument20 pagesShan Masala IN Bangladesh: Group Members Abdul Taiyeb 5780 Ayaz Dawood Rashid Sheikh Zubair KurdAbdul Taiyeb Bhaiji100% (2)
- CPU Architecture: Control Unit (CU)Document10 pagesCPU Architecture: Control Unit (CU)i study100% (1)
- DWDM Unit-3: What Is Classification? What Is Prediction?Document12 pagesDWDM Unit-3: What Is Classification? What Is Prediction?Sai Venkat GudlaNo ratings yet
- Study Outline For Data StructureDocument73 pagesStudy Outline For Data StructuremusaNo ratings yet
- Study Outline For CSE Version-7Document159 pagesStudy Outline For CSE Version-7musaNo ratings yet
- Genetic Algorithms (GA)Document32 pagesGenetic Algorithms (GA)musaNo ratings yet
- Study Outline of JAVA ProgrammingDocument84 pagesStudy Outline of JAVA ProgrammingmusaNo ratings yet
- A Guided Book of Engineering EconomicsDocument54 pagesA Guided Book of Engineering EconomicsmusaNo ratings yet
- Lecture-8. Only For This BatchDocument46 pagesLecture-8. Only For This BatchmusaNo ratings yet
- Lecture-8. Natural Language ProcessingDocument53 pagesLecture-8. Natural Language ProcessingmusaNo ratings yet
- Lecture 4 PropositionalLogic 2Document116 pagesLecture 4 PropositionalLogic 2musaNo ratings yet
- Lecture 2 AgentDocument44 pagesLecture 2 AgentmusaNo ratings yet
- Lecture-3.2 Constraint Satisfaction Problem (CSP)Document26 pagesLecture-3.2 Constraint Satisfaction Problem (CSP)musaNo ratings yet
- Lcture-1 Introduction To Artificial Intelligence Version-1Document54 pagesLcture-1 Introduction To Artificial Intelligence Version-1musaNo ratings yet
- Lecture-3 Problems Solving by SearchingDocument79 pagesLecture-3 Problems Solving by SearchingmusaNo ratings yet
- Lecture 5 Bayesian Classification 3Document103 pagesLecture 5 Bayesian Classification 3musaNo ratings yet
- Lecture-4.1. Representing Knowledge Using RulesDocument29 pagesLecture-4.1. Representing Knowledge Using RulesmusaNo ratings yet
- Slide-5 Discrete Fourier Transfor-1Document36 pagesSlide-5 Discrete Fourier Transfor-1musaNo ratings yet
- The Inverse Z-TransformDocument16 pagesThe Inverse Z-Transformdeekshasingh96No ratings yet
- Slide-1 Introduction To Signal ProcessingDocument104 pagesSlide-1 Introduction To Signal ProcessingmusaNo ratings yet
- Slide 7 FilterDocument66 pagesSlide 7 FiltermusaNo ratings yet
- Slide-3 Z Transform and Its ApplicationDocument76 pagesSlide-3 Z Transform and Its ApplicationmusaNo ratings yet
- Slide-6 Fast Fourier TransformDocument25 pagesSlide-6 Fast Fourier TransformmusaNo ratings yet
- Slide-4.1Frequency Analysis Fo Discrete-Time SignalDocument18 pagesSlide-4.1Frequency Analysis Fo Discrete-Time SignalmusaNo ratings yet
- Slide-4 Frequency Analysis of Signal - 1Document28 pagesSlide-4 Frequency Analysis of Signal - 1musaNo ratings yet
- Slide-2.2 Discrete Time Linear Time Invariant (LTI) System-2Document94 pagesSlide-2.2 Discrete Time Linear Time Invariant (LTI) System-2musaNo ratings yet
- Slide 2 Discrete Time SignalsDocument100 pagesSlide 2 Discrete Time SignalsmusaNo ratings yet
- Other Books NewDocument136 pagesOther Books NewYashRaj ChoudharyNo ratings yet
- UFO FILES Black Box Ufo SecretsDocument10 pagesUFO FILES Black Box Ufo SecretsNomad XNo ratings yet
- ENGGBOQEstimation ReportDocument266 pagesENGGBOQEstimation ReportUTTAL RAYNo ratings yet
- Engine Cpta Czca Czea Ea211 EngDocument360 pagesEngine Cpta Czca Czea Ea211 EngleuchiNo ratings yet
- Stat and Prob Q1 M3Document15 pagesStat and Prob Q1 M3Samantha Kyle E. PedrigozaNo ratings yet
- Unit 3 Digital Documentation: Multiple Choice QuestionsDocument7 pagesUnit 3 Digital Documentation: Multiple Choice Questions07tp27652% (21)
- SARTIKA LESTARI PCR COVID-19 POSITIVEDocument1 pageSARTIKA LESTARI PCR COVID-19 POSITIVEsartika lestariNo ratings yet
- DepEd CI GuidebookDocument244 pagesDepEd CI Guidebookasdfg100% (4)
- Adobe Scan 25 Dec 202Document1 pageAdobe Scan 25 Dec 202Jimit ShahNo ratings yet
- Driven by Passion. Eager To Grow. If That'S You, Join Bearingpoint!Document15 pagesDriven by Passion. Eager To Grow. If That'S You, Join Bearingpoint!Ana Maria PetreNo ratings yet
- Indiana University PressDocument33 pagesIndiana University Pressrenato lopesNo ratings yet
- Is BN 9789526041957Document72 pagesIs BN 9789526041957supriya rakshitNo ratings yet
- Os Ass-1 PDFDocument18 pagesOs Ass-1 PDFDinesh R100% (1)
- MCA 312 Design&Analysis of Algorithm QuestionBankDocument7 pagesMCA 312 Design&Analysis of Algorithm QuestionBanknbprNo ratings yet
- Product Item Code Model Item Description MRP Count Down PricesDocument1 pageProduct Item Code Model Item Description MRP Count Down Pricesලහිරු විතානාච්චිNo ratings yet
- DIK 18A Intan Suhariani 218112100 CJR Research MethodologyDocument9 pagesDIK 18A Intan Suhariani 218112100 CJR Research MethodologyFadli RafiNo ratings yet
- KireraDocument3 pagesKireramurithiian6588No ratings yet
- Schmitt Trigger FinalDocument4 pagesSchmitt Trigger Finalsidd14feb92No ratings yet
- ARP 598, D, 2016, Microscopic SizingDocument17 pagesARP 598, D, 2016, Microscopic SizingRasoul gholinia kiviNo ratings yet
- Physics 8 - EnergyDocument54 pagesPhysics 8 - EnergyHakim AbbasNo ratings yet
- PROPOSED ARFF BUILDINGDocument27 pagesPROPOSED ARFF BUILDINGDale Bryan S DalmacioNo ratings yet
- Shark KssDocument2 pagesShark Kssleelee123321No ratings yet
- Trends and Fads in Business SVDocument2 pagesTrends and Fads in Business SVMarie-Anne DentzerNo ratings yet
- Lesson Plans For Class ObservationDocument7 pagesLesson Plans For Class ObservationArnel NavalesNo ratings yet
- Work Text INGE09: Understanding The SelfDocument24 pagesWork Text INGE09: Understanding The SelfFrancis Dave MabborangNo ratings yet
- RPH Sains DLP Y3 2018Document29 pagesRPH Sains DLP Y3 2018Sukhveer Kaur0% (1)
- Optimizing Blended Learning with Synchronous and Asynchronous TechnologiesDocument24 pagesOptimizing Blended Learning with Synchronous and Asynchronous TechnologiesAnonymous GOUaH7FNo ratings yet
- Dcs Ict2113 (Apr22) - LabDocument6 pagesDcs Ict2113 (Apr22) - LabMarwa NajemNo ratings yet
- CMO Olympiad Book For Class 3Document13 pagesCMO Olympiad Book For Class 3Srividya BaiNo ratings yet
- Green Building by Superadobe TechnologyDocument22 pagesGreen Building by Superadobe TechnologySivaramakrishnaNalluri67% (3)