You might also like
- Applied Economics-Q3-Module-1Document28 pagesApplied Economics-Q3-Module-1manuel advincula100% (10)
- Lec 17 SARSA Expected SARSA Q LearningDocument4 pagesLec 17 SARSA Expected SARSA Q Learningsachin bhadangNo ratings yet
- DD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionDocument9 pagesDD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionbboyvnNo ratings yet
- Sec 12Document5 pagesSec 12Prateer Kr RoyNo ratings yet
- EE 675 Lecture 27th MarchDocument4 pagesEE 675 Lecture 27th Marchsachin bhadangNo ratings yet
- Artificial Intelligence: Computer Science & Engineering, Khulna UniversityDocument30 pagesArtificial Intelligence: Computer Science & Engineering, Khulna Universityrazi.d6968No ratings yet
- RL 10 QUESTIONS FOR MID II Scheme of EvaluvationDocument15 pagesRL 10 QUESTIONS FOR MID II Scheme of EvaluvationmovatehireNo ratings yet
- Reinforcement LearningDocument32 pagesReinforcement Learningvedang maheshwariNo ratings yet
- RL FrraDocument10 pagesRL FrraVishal TarwatkarNo ratings yet
- Markov Decision Processes & Reinforcement Learning: Megan Smith Lehigh University, Fall 2006Document40 pagesMarkov Decision Processes & Reinforcement Learning: Megan Smith Lehigh University, Fall 2006Sanja Lazarova-MolnarNo ratings yet
- 5.4-Reinforcement Learning-Part2-Learning-AlgorithmsDocument15 pages5.4-Reinforcement Learning-Part2-Learning-Algorithmspolinati.vinesh2023No ratings yet
- DQL: A New Updating Strategy For Reinforcement Learning Based On Q-LearningDocument12 pagesDQL: A New Updating Strategy For Reinforcement Learning Based On Q-LearningDanelysNo ratings yet
- Monte Carlo LearningDocument14 pagesMonte Carlo LearningSivasathiya GNo ratings yet
- Reinf 2Document4 pagesReinf 2faria shahzadiNo ratings yet
- Con Reinforcement Aug Dec 2020Document52 pagesCon Reinforcement Aug Dec 2020acer asusNo ratings yet
- Papadimitriou Monte Carlo BiasDocument10 pagesPapadimitriou Monte Carlo BiasTom WestNo ratings yet
- RL FrraDocument9 pagesRL FrraVishal TarwatkarNo ratings yet
- A17 ComplexdecisionsDocument28 pagesA17 ComplexdecisionsAbhishek NandaNo ratings yet
- Zeyu Tan AI Assessment ReportDocument14 pagesZeyu Tan AI Assessment ReportAnna LionNo ratings yet
- Reinforcement Learning (Part 2) : Nguyen Do Van, PHDDocument46 pagesReinforcement Learning (Part 2) : Nguyen Do Van, PHDÁc QủyNo ratings yet
- CSD311: Artificial IntelligenceDocument11 pagesCSD311: Artificial IntelligenceAyaan KhanNo ratings yet
- Unit 4Document7 pagesUnit 4csedept20No ratings yet
- Reinforcement Learning: Karan KathpaliaDocument80 pagesReinforcement Learning: Karan KathpaliaRaghuNo ratings yet
- cs188 sp23 Note14Document2 pagescs188 sp23 Note14sondosNo ratings yet
- Files 1 2019 June NotesHubDocument 1559416363Document6 pagesFiles 1 2019 June NotesHubDocument 1559416363mail.sushilk8403No ratings yet
- ML Unit 4Document9 pagesML Unit 4themojlvlNo ratings yet
- Reinforcement LearningDocument27 pagesReinforcement LearningPrafful VarshneyNo ratings yet
- Reinforcement Learning: Nguyen Do Van, PHDDocument40 pagesReinforcement Learning: Nguyen Do Van, PHDÁc QủyNo ratings yet
- ReinforcementDocument9 pagesReinforcementShivareddy GangamNo ratings yet
- Reinforcement LearningDocument5 pagesReinforcement LearningHead Of Department Computer Science and EngineeringNo ratings yet
- Unit 4Document56 pagesUnit 4randyyNo ratings yet
- RL Complete Unit-5Document30 pagesRL Complete Unit-5Harpreet Singh BaggaNo ratings yet
- Reinforcement LearningDocument64 pagesReinforcement LearningChandra Prakash MeenaNo ratings yet
- Reinforcement Learning: Yijue HouDocument34 pagesReinforcement Learning: Yijue HouAnum KhawajaNo ratings yet
- Unit-5 Genetic Reinforcement Markov Q-LearningDocument39 pagesUnit-5 Genetic Reinforcement Markov Q-LearningAyush Rao RajputNo ratings yet
- Hill Climbing Algorithm in AIDocument4 pagesHill Climbing Algorithm in AImaa xeroxNo ratings yet
- Assignment - 05: Shivam Kamlesh Yadav BEIT-B4 77Document6 pagesAssignment - 05: Shivam Kamlesh Yadav BEIT-B4 77Game TwitcherNo ratings yet
- Reinforcement Learning: Russell and Norvig: CH 21Document16 pagesReinforcement Learning: Russell and Norvig: CH 21ZuzarNo ratings yet
- Markov Decision Process TutorialDocument22 pagesMarkov Decision Process TutorialVinitha VasudevanNo ratings yet
- Unit 5Document45 pagesUnit 5randyyNo ratings yet
- DPG原文Document9 pagesDPG原文杨烨峰No ratings yet
- Reinforcement Learning: Russell and Norvig: CH 21Document16 pagesReinforcement Learning: Russell and Norvig: CH 21ZuzarNo ratings yet
- CS6700 Reinforcement Learning PA1 Jan May 2024Document4 pagesCS6700 Reinforcement Learning PA1 Jan May 2024Rahul me20b145No ratings yet
- Unit-5 ML NotesDocument31 pagesUnit-5 ML NotesPrateek SaxenaNo ratings yet
- Machine Learning For Data ScienceDocument20 pagesMachine Learning For Data SciencepraveenakgNo ratings yet
- Reinforcement Learning and Control Andrew NG Vid Lecture 16-17Document15 pagesReinforcement Learning and Control Andrew NG Vid Lecture 16-17Ehsan Elahi BashirNo ratings yet
- Hill Climbing Algorithm in Artificial IntelligenceDocument6 pagesHill Climbing Algorithm in Artificial Intelligencemissionps23No ratings yet
- Reinforcement Learning and Control: CS229 Lecture NotesDocument15 pagesReinforcement Learning and Control: CS229 Lecture NotesIvan AvramovNo ratings yet
- Hill Climbing Algorithm in Artificial IntelligenceDocument6 pagesHill Climbing Algorithm in Artificial IntelligenceNirmal Varghese Babu 2528No ratings yet
- Markov Decision Processes: Stochastic, Sequential EnvironmentsDocument20 pagesMarkov Decision Processes: Stochastic, Sequential Environmentsmikey61No ratings yet
- Unit 5Document36 pagesUnit 5Abhinav KaushikNo ratings yet
- Lecture Notes Deep Reinforcement Learning: Generalizability in Deep RLDocument7 pagesLecture Notes Deep Reinforcement Learning: Generalizability in Deep RLRajat RaiNo ratings yet
- A Review of Deep Deterministic Policy Gradients in Reinforcement Learning For Robotics 1Document8 pagesA Review of Deep Deterministic Policy Gradients in Reinforcement Learning For Robotics 1api-461820735No ratings yet
- RL With LCSDocument29 pagesRL With LCSarturoraymundoNo ratings yet
- Problem Set 1Document15 pagesProblem Set 1Muhammad HamzaNo ratings yet
- Reinforcement Learning: Instructor: Max WellingDocument18 pagesReinforcement Learning: Instructor: Max WellingZuzarNo ratings yet
- 2nd Hill ClimbingDocument4 pages2nd Hill ClimbingMuhammad ZaidNo ratings yet
- An Introduction To Markov Decision Processes: Bob Givan Ron Parr Purdue University Duke UniversityDocument23 pagesAn Introduction To Markov Decision Processes: Bob Givan Ron Parr Purdue University Duke UniversityRosin PriceNo ratings yet
- Dendral Expert SystemDocument18 pagesDendral Expert SystemJunaid khan83% (6)
- Appreciation of Mathematics in Nature EssayDocument2 pagesAppreciation of Mathematics in Nature EssayAndrea Marie S. GayloaNo ratings yet
- How People Live and Should Live Through TechDocument4 pagesHow People Live and Should Live Through TechJanmarc CorpuzNo ratings yet
- Feature Extraction For Classifying Students Based On Their Academic PerformanceDocument5 pagesFeature Extraction For Classifying Students Based On Their Academic PerformancesreebvritnNo ratings yet
- Webinar Reflection PaperDocument5 pagesWebinar Reflection PaperMitz Lorraine ZambranoNo ratings yet
- Assignment 1: Q1. Write Overview of Artificial IntelligenceDocument1 pageAssignment 1: Q1. Write Overview of Artificial IntelligenceSobjianNo ratings yet
- Integrating New Literacies in The CurriculumDocument8 pagesIntegrating New Literacies in The CurriculumAnnie Jane SamarNo ratings yet
- Describes Characteristics, Strengths, Weaknesses, and Importance of Qualitative ResearchDocument7 pagesDescribes Characteristics, Strengths, Weaknesses, and Importance of Qualitative ResearchMa Alona Tan DimaculanganNo ratings yet
- An Architectural Thesis Presented To The: Expected Month and Year of GraduationDocument8 pagesAn Architectural Thesis Presented To The: Expected Month and Year of GraduationDenise LaquinonNo ratings yet
- Pur Com - Ass 3Document2 pagesPur Com - Ass 3Justine AltheaNo ratings yet
- Research Methods For BusinessDocument12 pagesResearch Methods For BusinessJimmy CyrusNo ratings yet
- The Relationship Between Age of First Marriage, Contraceptive Use and Fertility of Currently Married Adolescent (Analysis of 2010 Riskesdas)Document13 pagesThe Relationship Between Age of First Marriage, Contraceptive Use and Fertility of Currently Married Adolescent (Analysis of 2010 Riskesdas)Alfin baruNo ratings yet
- SPS Section 1 V3.0 EnglishDocument19 pagesSPS Section 1 V3.0 EnglishjustinNo ratings yet
- Subhan ShehzadOutdoor Assessment (Tanzeela) (AutoRecovered)Document5 pagesSubhan ShehzadOutdoor Assessment (Tanzeela) (AutoRecovered)Kanza WaheedNo ratings yet
- c5 RoughSetDocument67 pagesc5 RoughSetSyarifah NazirahNo ratings yet
- Effect of Video Assisted Teaching On Knowledge, Attitude and Practice Regarding Ergonomics Among Secretaries at Selected Tertiary Care Center, PuducherryDocument5 pagesEffect of Video Assisted Teaching On Knowledge, Attitude and Practice Regarding Ergonomics Among Secretaries at Selected Tertiary Care Center, PuducherryMalarvizhi SureshNo ratings yet
- Study of Educational Aspiration and Socio-Economic Status of Secondary School StudentsDocument11 pagesStudy of Educational Aspiration and Socio-Economic Status of Secondary School StudentsvivekNo ratings yet
- Artificial Intelligence and Robotics (Huimin Lu)Document265 pagesArtificial Intelligence and Robotics (Huimin Lu)usdt28599No ratings yet
- Management Theory and Projects (RECO 7074) Introduction 2019Document26 pagesManagement Theory and Projects (RECO 7074) Introduction 2019To Pui LamNo ratings yet
- Res JR SC Offic 20mar2019Document1 pageRes JR SC Offic 20mar2019LNIPE NERCNo ratings yet
- Assignment 2 (Week 2)Document5 pagesAssignment 2 (Week 2)Tinatini BakashviliNo ratings yet
- Deegan - FAT3e - Chapter - 12: StudentDocument17 pagesDeegan - FAT3e - Chapter - 12: StudentKamal samaNo ratings yet
- Company: Groww, India Job Profile: Apply With CV1 Apply With CV2 Apply With CV3Document1 pageCompany: Groww, India Job Profile: Apply With CV1 Apply With CV2 Apply With CV3Soham GhoshNo ratings yet
- Test Bank For Psychology 12th Edition WadeDocument36 pagesTest Bank For Psychology 12th Edition Wadepannageimban.81c15100% (43)
- Should We Go DeeperDocument9 pagesShould We Go DeeperKevin MichaNo ratings yet
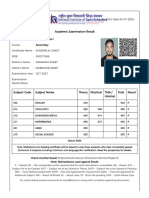
- Result - National Institute of Open SchoolingDocument2 pagesResult - National Institute of Open Schoolingwwwsundar856No ratings yet
- CNN-based and DTW Features For Human Activity Recognition On Depth MapsDocument14 pagesCNN-based and DTW Features For Human Activity Recognition On Depth Mapsjacekt89No ratings yet
- Kovalenko SpivakDocument15 pagesKovalenko SpivakliabthNo ratings yet
- CSE Syllabus Regulation 2021 Anna University - Pa…Document1 pageCSE Syllabus Regulation 2021 Anna University - Pa…Arshiya S ANo ratings yet