You might also like
- Collision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle MethodDocument15 pagesCollision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle Methodabinaya_359109181No ratings yet
- An Overview of Autonomous Mobile Robot Path Planning AlgorithmsDocument7 pagesAn Overview of Autonomous Mobile Robot Path Planning AlgorithmsWilberFabiánNo ratings yet
- An Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Document4 pagesAn Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Vesag nNo ratings yet
- Robot Path Planning For Maze NavigationDocument5 pagesRobot Path Planning For Maze NavigationAbhishek KulkarniNo ratings yet
- Research ProposalDocument5 pagesResearch ProposalHoang HuynhNo ratings yet
- Multi Robot Path Planning For WarehouseDocument13 pagesMulti Robot Path Planning For WarehouseAnkur BhargavaNo ratings yet
- Sensors: Path Planning For Autonomous Mobile Robots: A ReviewDocument29 pagesSensors: Path Planning For Autonomous Mobile Robots: A Review21P410 - VARUN MNo ratings yet
- Multi-Level Control For Multiple Mobile Robot SystDocument30 pagesMulti-Level Control For Multiple Mobile Robot Systducdo dangNo ratings yet
- Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningDocument8 pagesMobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningVarun AgarwalNo ratings yet
- Average Case Constant Factor Time and Distance Optimal Multi-Robot Path Planning in Well-Connected EnvironmentsDocument16 pagesAverage Case Constant Factor Time and Distance Optimal Multi-Robot Path Planning in Well-Connected EnvironmentsjayaheNo ratings yet
- Motion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiDocument6 pagesMotion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiInternational Journal of Engineering Inventions (IJEI)No ratings yet
- AStar 1Document11 pagesAStar 1truhtNo ratings yet
- s12008 023 01701 1Document25 pagess12008 023 01701 1psanoop2023No ratings yet
- Voronoi Diagram, Dynamic Path PlanningDocument4 pagesVoronoi Diagram, Dynamic Path PlanningrakeluvNo ratings yet
- Optimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian ParberryDocument10 pagesOptimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian Parberrysaeed khodayganNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- Mapping and Exploration in A Hierarchical Heterogeneous 2013 Robotics and Au 2Document15 pagesMapping and Exploration in A Hierarchical Heterogeneous 2013 Robotics and Au 2AlexandraDumitrescuNo ratings yet
- Autonomous 16Document24 pagesAutonomous 16MatrimNo ratings yet
- Constraint-Based Optimization of Priority Schemes For Decoupled Path Planning TechniquesDocument15 pagesConstraint-Based Optimization of Priority Schemes For Decoupled Path Planning TechniquessigmateNo ratings yet
- Improved Path-Finding Algorithm For Robot SoccersDocument5 pagesImproved Path-Finding Algorithm For Robot SoccersaymanNo ratings yet
- FreeTutorials UsDocument15 pagesFreeTutorials Ussmkumaran90No ratings yet
- Sampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1Document20 pagesSampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1punithNo ratings yet
- Sensors 22 04022Document27 pagesSensors 22 04022Nikhil AhirwarNo ratings yet
- Optimal Path Planning of Mobile Robots: A ReviewDocument7 pagesOptimal Path Planning of Mobile Robots: A ReviewIng. Omar SerranoNo ratings yet
- AMR 2010/2011: Final Projects: 0. General InformationDocument4 pagesAMR 2010/2011: Final Projects: 0. General InformationIvan AvramovNo ratings yet
- Kinodynamic Motion Planning For Autonomous VehiclesDocument14 pagesKinodynamic Motion Planning For Autonomous VehiclesmaklemzNo ratings yet
- Barraquand91 RPPDocument24 pagesBarraquand91 RPPArcher 010No ratings yet
- Applications and Safety Issues in An EmergencyDocument48 pagesApplications and Safety Issues in An Emergencyuditsingh665No ratings yet
- Alfabi Muhlisin Sakti: Path Planning Using Arrival Time Field For Nonholonomic Mobile RobotDocument4 pagesAlfabi Muhlisin Sakti: Path Planning Using Arrival Time Field For Nonholonomic Mobile RobotAlfabi Muhlisin SaktiNo ratings yet
- Obstacles Avoidance For An Articulated Robot Using Modified Smooth Path PlanningDocument6 pagesObstacles Avoidance For An Articulated Robot Using Modified Smooth Path PlanningKaranNo ratings yet
- Cs7630 - Autonomous Robotics Final Project Report: Georgia Institute of Technology Spring 2008Document24 pagesCs7630 - Autonomous Robotics Final Project Report: Georgia Institute of Technology Spring 2008Intel KarthikNo ratings yet
- Optimal Path Planning of Mobile Robots A ReviewDocument8 pagesOptimal Path Planning of Mobile Robots A ReviewKEEP CALM studiosNo ratings yet
- Autonomous Topological Optimisation For Multi-Robot Systems in LogisticsDocument9 pagesAutonomous Topological Optimisation For Multi-Robot Systems in LogisticsvipinNo ratings yet
- Peerj Cs 556Document25 pagesPeerj Cs 556Raymond DeMoriziNo ratings yet
- SensorsDocument20 pagesSensorsfaith_khp73301No ratings yet
- A Survey of Path Planning Algorithms For Mobile RobotsDocument21 pagesA Survey of Path Planning Algorithms For Mobile RobotsSudhakar RamasamyNo ratings yet
- Ratering-Gini1995 Article RobotNavigationInAKnownEnvironDocument17 pagesRatering-Gini1995 Article RobotNavigationInAKnownEnvironSimi MarNo ratings yet
- Sensor-Based Navigation of A Mobile Robot in An Indoor EnvironmentDocument18 pagesSensor-Based Navigation of A Mobile Robot in An Indoor EnvironmentGanesh Kumar ArumugamNo ratings yet
- Chaotic Motion Planning For Mobile Robots Progress Challenges and OpportunitiesDocument23 pagesChaotic Motion Planning For Mobile Robots Progress Challenges and OpportunitiesJesus Manuel Muñoz PachecoNo ratings yet
- Research Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningDocument9 pagesResearch Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningЄвген ВознюкNo ratings yet
- Trajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmDocument15 pagesTrajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmIAES International Journal of Robotics and AutomationNo ratings yet
- Optimizing Schedules For Prioritized Path Planning of Multi-Robot SystemsDocument6 pagesOptimizing Schedules For Prioritized Path Planning of Multi-Robot SystemssigmateNo ratings yet
- Materials Today: Proceedings: B.K. Patle, Sudarshan Sanap, Alok Jha, Brijesh Patel, Sunil Kumar KashyapDocument7 pagesMaterials Today: Proceedings: B.K. Patle, Sudarshan Sanap, Alok Jha, Brijesh Patel, Sunil Kumar KashyapTrần Quốc ThắngNo ratings yet
- Distributed Range-Based Relative Localization of Robot SwarmsDocument17 pagesDistributed Range-Based Relative Localization of Robot Swarmshbhbhb hbhbhbNo ratings yet
- Dynamic Window ApproachDocument23 pagesDynamic Window ApproachJulio Enrique FajardoNo ratings yet
- CDSR 127Document8 pagesCDSR 127moaziz.eseNo ratings yet
- Multi-Step Motion Planning For Free-Climbing RobotsDocument16 pagesMulti-Step Motion Planning For Free-Climbing Robotstahder77No ratings yet
- A Universal Vision-Based Navigation System For Autonomous Indoor RobotsDocument14 pagesA Universal Vision-Based Navigation System For Autonomous Indoor RobotsNono NonoNo ratings yet
- 2 4417 Kara L SKDocument10 pages2 4417 Kara L SKfaith_khp73301No ratings yet
- Mathematics 10 03990 v2Document28 pagesMathematics 10 03990 v2asNo ratings yet
- Using PSO 2Document6 pagesUsing PSO 2smkumaran90No ratings yet
- Methodology For Path Planning and Optimization of Mobile Robots: A Review Methodology For Path Planning and Optimization of Mobile Robots: A ReviewDocument12 pagesMethodology For Path Planning and Optimization of Mobile Robots: A Review Methodology For Path Planning and Optimization of Mobile Robots: A ReviewDilek METİNNo ratings yet
- A Random Sampling Scheme - For Path PlanningDocument26 pagesA Random Sampling Scheme - For Path PlanningblazeoftheevildragonNo ratings yet
- Collaboration RobotsDocument19 pagesCollaboration RobotsMohaman GonzaNo ratings yet
- Neural Networks Based Reinforcement Learning For Mobile Robots Obstacle AvoidanceDocument12 pagesNeural Networks Based Reinforcement Learning For Mobile Robots Obstacle AvoidanceAlexander Peregrina OchoaNo ratings yet
- Collision-Free Coverage Control of Swarm RoboticsDocument19 pagesCollision-Free Coverage Control of Swarm RoboticsDadi SetiadiNo ratings yet
- Robot Global Path Planning Overview and A Variation of Ant Colony System AlgorithmDocument8 pagesRobot Global Path Planning Overview and A Variation of Ant Colony System AlgorithmBenchmoham AmenNo ratings yet
- Hybrid Methods of Autonomous Path PlanningDocument28 pagesHybrid Methods of Autonomous Path PlanningGiorgi RcheulishviliNo ratings yet
- A Comparative Study of Deterministic and Probabilistic Mobile Robot Path Planning Algorithms PDFDocument6 pagesA Comparative Study of Deterministic and Probabilistic Mobile Robot Path Planning Algorithms PDFBara Abu ShaqraNo ratings yet
- New Potential Functions For Multi Robot Path Planning - SWARM or SPREADDocument5 pagesNew Potential Functions For Multi Robot Path Planning - SWARM or SPREADShridhar DodamaniNo ratings yet
- Multi-Robot Path Planning in A Dynamic Environment Using Improved Gravitational Search AlgorithmDocument19 pagesMulti-Robot Path Planning in A Dynamic Environment Using Improved Gravitational Search AlgorithmShridhar DodamaniNo ratings yet
- ComponentsDocument1 pageComponentsShridhar DodamaniNo ratings yet
- Track InspectionDocument3 pagesTrack InspectionShridhar DodamaniNo ratings yet
- Numerical Linear Algebra: Course Material Networkmaths Graduate Programme Maynooth 2010Document66 pagesNumerical Linear Algebra: Course Material Networkmaths Graduate Programme Maynooth 2010hoangan118No ratings yet
- Data Analysis ProblemsDocument12 pagesData Analysis Problems陈凯华No ratings yet
- Study of Page Replacement Algorithm Based On Experiment: Wang HongDocument5 pagesStudy of Page Replacement Algorithm Based On Experiment: Wang HongvinjamurisivaNo ratings yet
- Prezentacija Fuzzy Inference SystemsDocument18 pagesPrezentacija Fuzzy Inference SystemsruzmirNo ratings yet
- Quantum Computing CSDocument101 pagesQuantum Computing CSRaghavNo ratings yet
- Optimization Techniques: Continuous - Discrete - Functional OptimizationDocument20 pagesOptimization Techniques: Continuous - Discrete - Functional OptimizationAAAAAANo ratings yet
- DAA - Unit IV - Greedy Technique - Lecture Slides PDFDocument50 pagesDAA - Unit IV - Greedy Technique - Lecture Slides PDFkennygoyalNo ratings yet
- S600conf CFGDocument168 pagesS600conf CFGROBINNo ratings yet
- Horse Racing Kelly CriterionDocument9 pagesHorse Racing Kelly CriteriondatsnoNo ratings yet
- 5-Eigenvalue Buckling PredictionDocument4 pages5-Eigenvalue Buckling PredictionMaurizio FalconieriNo ratings yet
- History of Neural NetworksDocument4 pagesHistory of Neural NetworksAmbrish SinghNo ratings yet
- AAAI-22 Keywords - AAAI 2022 ConferenceDocument13 pagesAAAI-22 Keywords - AAAI 2022 ConferencedewufhweuihNo ratings yet
- AE4-Activity 3B Minimization of Cost - Simplex MethodDocument3 pagesAE4-Activity 3B Minimization of Cost - Simplex MethodMarco RegunayanNo ratings yet
- The Design of Approximation Algorithm 2011 PDFDocument500 pagesThe Design of Approximation Algorithm 2011 PDFThanh Thiện Trần ChâuNo ratings yet
- EE4601 Communication Systems: Week 3 Random Processes, Stationarity, Means, CorrelationsDocument15 pagesEE4601 Communication Systems: Week 3 Random Processes, Stationarity, Means, CorrelationsragvshahNo ratings yet
- Brownian Motion and Gaussian Processes For Machine LearningDocument37 pagesBrownian Motion and Gaussian Processes For Machine LearningUmang SrivastavaNo ratings yet
- Lane Changing Models: Maulana Azad National Institute of Technology Bhopal (M.P)Document29 pagesLane Changing Models: Maulana Azad National Institute of Technology Bhopal (M.P)Vaibhav JainNo ratings yet
- Automation & RoboticsDocument1 pageAutomation & RoboticsHarish HNo ratings yet
- A Fuzzy Logic Temperature Controller For Preterm NeonateDocument16 pagesA Fuzzy Logic Temperature Controller For Preterm Neonatebudi_umm100% (1)
- Weld Defect Extraction and ClassificationDocument8 pagesWeld Defect Extraction and ClassificationzsmithNo ratings yet
- Test 1-Business Mathematics-QUESTION-STUDENTDocument7 pagesTest 1-Business Mathematics-QUESTION-STUDENTVishalan FCNo ratings yet
- (2016 DeepMind) AsynchronousMethodsforDeepReinforcementLearning PDFDocument10 pages(2016 DeepMind) AsynchronousMethodsforDeepReinforcementLearning PDFAnis MehrabNo ratings yet
- Investment Analysis and Portfolio Management: Frank K. Reilly & Keith C. BrownDocument52 pagesInvestment Analysis and Portfolio Management: Frank K. Reilly & Keith C. BrownWhy you want to know100% (1)
- Comparing Clustering Algorithms Using Financial Time-Series DataDocument21 pagesComparing Clustering Algorithms Using Financial Time-Series Dataijsab.comNo ratings yet
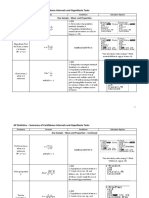
- AP Statistics - Summary of Confidence Intervals and Hypothesis TestsDocument5 pagesAP Statistics - Summary of Confidence Intervals and Hypothesis TestsThảo VânNo ratings yet
- Using Deep Learning To Enhance Cancer Diagnosis and ClassificationDocument8 pagesUsing Deep Learning To Enhance Cancer Diagnosis and ClassificationEndy PranotoNo ratings yet
- Ss PaperDocument8 pagesSs PaperbharadwajNo ratings yet
- Unit-I EicDocument6 pagesUnit-I EicSanjayNo ratings yet
- Shanon HartleyDocument5 pagesShanon Hartleynlb53No ratings yet
- DSM Assignment#3 (Module#4) .PDFDocument2 pagesDSM Assignment#3 (Module#4) .PDFUmarShahrozNo ratings yet