You might also like
- Engine Izusu 4h Shop ManualDocument88 pagesEngine Izusu 4h Shop ManualAgustin Guevara Carranza92% (37)
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideFrom EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideRating: 4 out of 5 stars4/5 (8)
- Design of TankDocument22 pagesDesign of TankRahul100% (2)
- Volvo BM L50B Wheel LoaderDocument21 pagesVolvo BM L50B Wheel Loaderangel primo100% (2)
- Mock Board Examination For CriminologyDocument76 pagesMock Board Examination For CriminologyOdigirb Galapia Gumarang II100% (10)
- Hydrulic PressDocument3 pagesHydrulic PressShubhamNo ratings yet
- Rotating QuestionsDocument5 pagesRotating QuestionsSud100% (1)
- Injector s60Document15 pagesInjector s60Alex Forero100% (7)
- Properties of PolymerDocument36 pagesProperties of PolymerhedayatinluvNo ratings yet
- ElectroHydraulic PracticalDocument9 pagesElectroHydraulic PracticalXander RamburnNo ratings yet
- Holography Research and Technologies PDFDocument466 pagesHolography Research and Technologies PDFramsankarkmNo ratings yet
- 1830 - Fea Fatigue Analysis Report PDFDocument19 pages1830 - Fea Fatigue Analysis Report PDFGabbar SinghNo ratings yet
- Electrical Design-StepsDocument13 pagesElectrical Design-Stepsnadeem UddinNo ratings yet
- Stan Shiels on centrifugal pumps: Collected articles from 'World Pumps' magazineFrom EverandStan Shiels on centrifugal pumps: Collected articles from 'World Pumps' magazineRating: 5 out of 5 stars5/5 (1)
- Industrial Hydraulic Circuits Slide ShareDocument35 pagesIndustrial Hydraulic Circuits Slide ShareUMIPL HydNo ratings yet
- Unit 6 Hydraulic and Pneumatic CircuitsDocument49 pagesUnit 6 Hydraulic and Pneumatic CircuitsshubhamrasalNo ratings yet
- Industrial Hydraulic CircuitsDocument16 pagesIndustrial Hydraulic CircuitskingkakingNo ratings yet
- Full Report HydraulicsDocument18 pagesFull Report HydraulicsNurulSyafiqahNo ratings yet
- What Is Hydraulic Power Pack PDFDocument8 pagesWhat Is Hydraulic Power Pack PDFKevin Rio HNo ratings yet
- HydraulicsDocument11 pagesHydraulicsaldz5No ratings yet
- Transmision Clark 24000Document21 pagesTransmision Clark 24000Lucyan Ionescu0% (2)
- Db55 Transmission Service ManualDocument64 pagesDb55 Transmission Service Manualgustavo100% (1)
- Dadri Coal Failure of Electro Hydraulic Converter Ehc Follow Up PistonDocument6 pagesDadri Coal Failure of Electro Hydraulic Converter Ehc Follow Up PistonNIKHIL KSHIRSAGAR100% (1)
- Sand Slinger MC Pneumatic 2016 VeltechDocument47 pagesSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamNo ratings yet
- Hydraulic NoiseDocument4 pagesHydraulic NoiseShyam KumarNo ratings yet
- ABC Air Supported StructureDocument2 pagesABC Air Supported StructureGimelle ButasNo ratings yet
- A67 - 03 Edc MS 6 - 4Document10 pagesA67 - 03 Edc MS 6 - 4marsh2002No ratings yet
- Rethinking Lighting in Museums and GalleriesDocument24 pagesRethinking Lighting in Museums and GalleriesAbhishëk ChhonkarNo ratings yet
- Automation and Robotics LabDocument38 pagesAutomation and Robotics LabRanjit KumarNo ratings yet
- J Series MANUALDocument15 pagesJ Series MANUALJairzhino EspinozaNo ratings yet
- Positive Displ - PumpDocument10 pagesPositive Displ - Pumpagrocel_bhv5591No ratings yet
- Design and Fabrication of 5 Ton HydrauliDocument10 pagesDesign and Fabrication of 5 Ton HydrauliPaula VesteneanuNo ratings yet
- Chapter 6 HYDRAULICDocument18 pagesChapter 6 HYDRAULICmuthukumaranNo ratings yet
- Simulation Research On Cutterhead Hydraulic DriveDocument7 pagesSimulation Research On Cutterhead Hydraulic Drivelightningmcqueen795No ratings yet
- Air Cooled Hydraulic Power UnitDocument17 pagesAir Cooled Hydraulic Power Unitbagdat231No ratings yet
- Bachelor of Technology: Compact Button Operated Hydraulic JackDocument9 pagesBachelor of Technology: Compact Button Operated Hydraulic JackxyzNo ratings yet
- Operaional Manual: YZBF-120LDDocument16 pagesOperaional Manual: YZBF-120LDMohamed AnwarNo ratings yet
- Automation LabDocument53 pagesAutomation LabMadhusudan BenzNo ratings yet
- Yzbf-120ld Hydraulic Power UnitDocument17 pagesYzbf-120ld Hydraulic Power Unitshahin safiNo ratings yet
- Magnetic Levitation CompressorDocument21 pagesMagnetic Levitation CompressorNilesh PatelNo ratings yet
- 185.hydro-Pneumatic Vice With Pressure BoosterDocument4 pages185.hydro-Pneumatic Vice With Pressure BoosterIyappanNo ratings yet
- Pneumatic Auto Feed Punching and Riveting Machine: A.S. Aditya Polapragada, K. Sri VarshaDocument7 pagesPneumatic Auto Feed Punching and Riveting Machine: A.S. Aditya Polapragada, K. Sri VarshaAkgec BoschNo ratings yet
- Hydraulic Sheet Cutting ReportDocument42 pagesHydraulic Sheet Cutting ReportFabin Antony71% (7)
- Hydraulic CircuitsDocument15 pagesHydraulic CircuitsShubham ModakNo ratings yet
- Yza410202 (Manual) e PDFDocument12 pagesYza410202 (Manual) e PDFmarjukiNo ratings yet
- ZQ127 25 Drill Pipe Power TongDocument12 pagesZQ127 25 Drill Pipe Power Tong刘巍No ratings yet
- Effects of Valve Needle Speed On Flow Characteristics in Control Valve For Unit Pump Fuel SystemDocument10 pagesEffects of Valve Needle Speed On Flow Characteristics in Control Valve For Unit Pump Fuel SystemTrạng LêNo ratings yet
- Thermal Analysis & Testing On (Aw-Type) Hermetically Sealed Reciprocating Refrigerent CompressorDocument10 pagesThermal Analysis & Testing On (Aw-Type) Hermetically Sealed Reciprocating Refrigerent CompressorGuru MaheshNo ratings yet
- Schema Booster MetanoDocument10 pagesSchema Booster MetanoMario Rabe GalbiatiNo ratings yet
- Ijet V2i2p15Document4 pagesIjet V2i2p15International Journal of Engineering and TechniquesNo ratings yet
- 4.oil Hydraulic Circuit Trainer KitDocument13 pages4.oil Hydraulic Circuit Trainer KitAlmas 1710No ratings yet
- Vane Motor PresentationDocument16 pagesVane Motor PresentationJayesh BholeNo ratings yet
- TITLE: Hydraulic Double & Pneumatic Automatic Reciprocating CircuitDocument13 pagesTITLE: Hydraulic Double & Pneumatic Automatic Reciprocating CircuitJagadeeshkeerthi KeerthiNo ratings yet
- 1.trial On Gear PumpDocument6 pages1.trial On Gear PumpAlmas 1710No ratings yet
- Paper Cutting MachineDocument23 pagesPaper Cutting MachineManish Shetty100% (2)
- 1.trial On Gear PumpDocument6 pages1.trial On Gear PumpAlmas 1710No ratings yet
- Automatic Control of Hydraulic Machine Using PLCDocument5 pagesAutomatic Control of Hydraulic Machine Using PLCIJSTENo ratings yet
- 10 Direction Control ValveDocument5 pages10 Direction Control ValveKoushikNo ratings yet
- KS3-Steam Turbine Over Speed Trip SystemsDocument8 pagesKS3-Steam Turbine Over Speed Trip SystemsArul Kumaran Kothandapani100% (1)
- Energy Efficient Hydraulic and Regenerative Cap - SICFP - 2005 - K-E RydbergDocument13 pagesEnergy Efficient Hydraulic and Regenerative Cap - SICFP - 2005 - K-E RydbergNemoz ZrNo ratings yet
- 3 934584 28 4Document3 pages3 934584 28 4Joan LuijkxNo ratings yet
- Unit-6 - Theory SMEDocument28 pagesUnit-6 - Theory SMEpratikpdhakateNo ratings yet
- Hydraulic MotorDocument3 pagesHydraulic Motorعبدالرحمن منصور100% (1)
- Pipe Clamp Pressing MC 2013Document49 pagesPipe Clamp Pressing MC 2013Chockalingam AthilingamNo ratings yet
- Prpc27 Mechatronics and Industrial AUTOMATION (Theory & Lab)Document10 pagesPrpc27 Mechatronics and Industrial AUTOMATION (Theory & Lab)Ajith KumarNo ratings yet
- Valvulas STEPLESSDocument10 pagesValvulas STEPLESSHerlin MorenoNo ratings yet
- Design and Analysis of Industrial Circuit: Vishwakarma Institute of Technology PuneDocument9 pagesDesign and Analysis of Industrial Circuit: Vishwakarma Institute of Technology PuneSUMEET SINGHNo ratings yet
- Material Analisis Estructural II PDFDocument6 pagesMaterial Analisis Estructural II PDFMilapalomaNo ratings yet
- Safety Detection Solutions Preventa LowDocument10 pagesSafety Detection Solutions Preventa LowYJoe18No ratings yet
- Castrol Optigear Synthetic X 320 Wto - TDSDocument3 pagesCastrol Optigear Synthetic X 320 Wto - TDSHector JNo ratings yet
- Masete 2015Document7 pagesMasete 2015idham05No ratings yet
- Third Quarter, Module 1Document24 pagesThird Quarter, Module 1Tyrone Dave BalitaNo ratings yet
- BesselDocument10 pagesBesselSeptian MambrasarNo ratings yet
- List of Raw Material Suppliers: Product Function Description SupplierDocument5 pagesList of Raw Material Suppliers: Product Function Description Supplierductoan32No ratings yet
- Offshore Engineering Course Paper MOM 490 Marine OperationsDocument43 pagesOffshore Engineering Course Paper MOM 490 Marine OperationsAlexey OzorishinNo ratings yet
- Practical Notes PP 2010Document13 pagesPractical Notes PP 2010Koh Seok Hwee100% (2)
- SP75Document2 pagesSP75Nanang Hadi SodikinNo ratings yet
- Eps ManDocument5 pagesEps ManIrfanKhanNo ratings yet
- Tech Bulletin - Suglets - More Than MonographDocument2 pagesTech Bulletin - Suglets - More Than MonographZeyad A AbdullahNo ratings yet
- A Study On Recent Trends in Fuel Injection Systems in Scramjet EnginesDocument3 pagesA Study On Recent Trends in Fuel Injection Systems in Scramjet EnginesSebastian CarterNo ratings yet
- C 769 - 98 - Qzc2oqDocument3 pagesC 769 - 98 - Qzc2oqneophymenNo ratings yet
- PB VWL 709 ChryslerDocument32 pagesPB VWL 709 ChryslerMatthew TaylorNo ratings yet
- Light 9 QPDocument14 pagesLight 9 QPYeasir Arham MahirNo ratings yet
- M.R.Barakat CVDocument2 pagesM.R.Barakat CVMohammad Rashad BarakatNo ratings yet
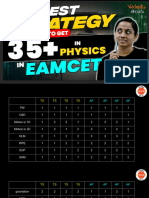
- Eamcet 30+ Weightage 2024Document8 pagesEamcet 30+ Weightage 2024whatwherewho3No ratings yet
- LTspice TutorialDocument38 pagesLTspice TutorialRazalie Murad100% (1)
- Dis Coupling - Misumi 1Document1 pageDis Coupling - Misumi 1SenthilNo ratings yet
- C o P y 3 3 3 3 3 3 3Document16 pagesC o P y 3 3 3 3 3 3 3Celso SimonatoNo ratings yet