You might also like
- Autonomous Vehicles and Future MobilityFrom EverandAutonomous Vehicles and Future MobilityPierluigi CoppolaNo ratings yet
- Hyperloop Transport Technology Assessment and System AnalysisDocument19 pagesHyperloop Transport Technology Assessment and System Analysisaff DNo ratings yet
- Handbook of Optimization in the Railway IndustryFrom EverandHandbook of Optimization in the Railway IndustryRalf BorndörferNo ratings yet
- Applsci 11 05951Document19 pagesApplsci 11 05951paganag333No ratings yet
- ICT in Multimodal Transport and Technological Trends: Unleashing Potential For The FutureDocument35 pagesICT in Multimodal Transport and Technological Trends: Unleashing Potential For The FutureFredy LimNo ratings yet
- VanGoeverdenetal.2018 ETRR PDFDocument18 pagesVanGoeverdenetal.2018 ETRR PDFalexNo ratings yet
- Hyperloop HLimplementationin India Astudyon Cost Volume Profit CVPanalysisonproposedhyperloopprojectin IndiaDocument15 pagesHyperloop HLimplementationin India Astudyon Cost Volume Profit CVPanalysisonproposedhyperloopprojectin Indiaalaa.abdulkareemNo ratings yet
- Mini Project 2 HyperloopDocument26 pagesMini Project 2 HyperloopSushil SrivastavaNo ratings yet
- Et RR Hyper LoopDocument18 pagesEt RR Hyper LoopPrashant KoriNo ratings yet
- 1 s2.0 S1366554522002496 MainDocument24 pages1 s2.0 S1366554522002496 MainIsamarMM01No ratings yet
- Analysis of Public-Private Partnership Models Ini High-Speed Railway Transport in PortugalDocument8 pagesAnalysis of Public-Private Partnership Models Ini High-Speed Railway Transport in PortugalGriselda VelantikaNo ratings yet
- Hyperloop - Prediction of SocialDocument17 pagesHyperloop - Prediction of SocialSylwia KadukNo ratings yet
- A Railway Wheel Wear Prediction Tool Based On A Multibody SoftwareDocument21 pagesA Railway Wheel Wear Prediction Tool Based On A Multibody SoftwareEnyew MelesseNo ratings yet
- Thesis Transportation SystemDocument5 pagesThesis Transportation Systemaflohdtogglebv100% (2)
- MaglevDocument10 pagesMaglevChhavi YadavNo ratings yet
- Economic Investigation For Building A High-Speed Rail in DevelopingDocument11 pagesEconomic Investigation For Building A High-Speed Rail in DevelopingSahar ShNo ratings yet
- Drones For Supply Chain Management and Logistics: A Review and Research AgendaDocument26 pagesDrones For Supply Chain Management and Logistics: A Review and Research AgendaRaul MarrtinezNo ratings yet
- Low-Pressure Tube SystemsDocument33 pagesLow-Pressure Tube SystemspranavNo ratings yet
- Sustainable Strategies For Mass Rapid Transit PPPsDocument21 pagesSustainable Strategies For Mass Rapid Transit PPPsalfredojhutapea01No ratings yet
- Tum Hyperloop Company and Its Connection To Elon MuskDocument18 pagesTum Hyperloop Company and Its Connection To Elon MuskMarouf OkeNo ratings yet
- A Unified Framework For Vehicle Rerouting and Traffic Light Control To Reduce Traffic CongestionDocument17 pagesA Unified Framework For Vehicle Rerouting and Traffic Light Control To Reduce Traffic CongestionKGNo ratings yet
- Towards The Internet of Smart Trains: A Review On Industrial Iot-Connected RailwaysDocument45 pagesTowards The Internet of Smart Trains: A Review On Industrial Iot-Connected RailwaysAdityaGuptaNo ratings yet
- Optimal Approach Layout READDocument6 pagesOptimal Approach Layout READZaid Mohammad AlRababahNo ratings yet
- Public Transport Case Studies and ApplicationsDocument4 pagesPublic Transport Case Studies and ApplicationsGiezel GarciaNo ratings yet
- The University of EdinburghDocument26 pagesThe University of Edinburghabdulsameteskiyayla632No ratings yet
- Sustainability 10 03344Document17 pagesSustainability 10 03344aroojNo ratings yet
- Transportation Research Part A: Patrick Manser, Henrik Becker, Sebastian Hörl, Kay W. Axhausen TDocument15 pagesTransportation Research Part A: Patrick Manser, Henrik Becker, Sebastian Hörl, Kay W. Axhausen TSulav KafleNo ratings yet
- High Speed Rail Literature ReviewDocument6 pagesHigh Speed Rail Literature Reviewafmzzaadfjygyf100% (2)
- Macrina 2020Document25 pagesMacrina 2020Javier GómezNo ratings yet
- Experienceswith Aerial Ropeway Transportation Systemsinthe Urban EnvironmentDocument23 pagesExperienceswith Aerial Ropeway Transportation Systemsinthe Urban EnvironmentAmanuel TessemaNo ratings yet
- Autonomous Vehicles: Challenges, Opportunities and Future Implications For Transportation PoliciesDocument21 pagesAutonomous Vehicles: Challenges, Opportunities and Future Implications For Transportation PoliciesSuguna SuhashiniNo ratings yet
- 1 s2.0 S2772586322000685 MainDocument9 pages1 s2.0 S2772586322000685 MainDafizNo ratings yet
- Green Intermodal Freight Transportation: Bi-Objective Modelling and AnalysisDocument20 pagesGreen Intermodal Freight Transportation: Bi-Objective Modelling and AnalysisNhư VũNo ratings yet
- Optimization of Transportation Systems: Konrad-Zuse-Zentrum F Ur Informationstechnik BerlinDocument18 pagesOptimization of Transportation Systems: Konrad-Zuse-Zentrum F Ur Informationstechnik BerlinĚlîâȟ Gṫȓ GûângûlNo ratings yet
- HyperloopDocument9 pagesHyperloopKritika SinghNo ratings yet
- Potential Policy Issues With Flying Car Technology Potential Policy Issues With Flying Car TechnologyDocument15 pagesPotential Policy Issues With Flying Car Technology Potential Policy Issues With Flying Car TechnologyZohaib HassanNo ratings yet
- Multi-Criteria Optimization of Public Transport On DemandDocument10 pagesMulti-Criteria Optimization of Public Transport On DemandIJAR JOURNALNo ratings yet
- Airport Master PlanDocument34 pagesAirport Master PlanTmanNo ratings yet
- WhitePaper Rolling Stock-2014Document18 pagesWhitePaper Rolling Stock-2014haftommmmNo ratings yet
- Dissertation Topics in Highway EngineeringDocument8 pagesDissertation Topics in Highway EngineeringWriteMyPersuasivePaperKansasCity100% (1)
- Selecting An Appropriate Express Railway PavementDocument13 pagesSelecting An Appropriate Express Railway PavementSamuel Mendoza SNo ratings yet
- Wandel Et All TRA ID 0852 Lisbon 2022-07-28 FinalDocument8 pagesWandel Et All TRA ID 0852 Lisbon 2022-07-28 FinalSten WandelNo ratings yet
- Hyperloop As An Evolution of Maglev: © A. SantangeloDocument20 pagesHyperloop As An Evolution of Maglev: © A. SantangeloCalix LeonelNo ratings yet
- Economic Investigation For Building A HS Rail in Developing Countries: The Case of EgyptDocument11 pagesEconomic Investigation For Building A HS Rail in Developing Countries: The Case of EgyptMarco FigueiredoNo ratings yet
- Thesis Topics in Transportation EngineeringDocument8 pagesThesis Topics in Transportation EngineeringBuyEssaysCheapErie100% (2)
- Innovative Railway StationsDocument10 pagesInnovative Railway StationsKamran 123No ratings yet
- Freight On Urban Public Transportation A Systematic Literature ReviewDocument13 pagesFreight On Urban Public Transportation A Systematic Literature ReviewNguyễn Phạm Kiến MinhNo ratings yet
- RAJENDRAN - Zack.2019 Insight On Strategic Air TaxiDocument36 pagesRAJENDRAN - Zack.2019 Insight On Strategic Air TaxiRaoniNo ratings yet
- Estimating Cost For Transportation Tunnel Projects A Systematic Literature ReviewDocument24 pagesEstimating Cost For Transportation Tunnel Projects A Systematic Literature Reviewalicarlos13No ratings yet
- Sciencedirect SciencedirectDocument19 pagesSciencedirect SciencedirectANIL KUMARNo ratings yet
- Transportation Research Board Paper SubmissionDocument9 pagesTransportation Research Board Paper Submissionsjcuwurif100% (1)
- 1 s2.0 S0967070X18305936 MainDocument19 pages1 s2.0 S0967070X18305936 MainAmir ShixaliyeNo ratings yet
- Case Studies On Transport Policy April 2017Document4 pagesCase Studies On Transport Policy April 2017Faizan PathanNo ratings yet
- Intercity Passenger Rail: J A. H, Parsons Brinckerhoff Quade & Douglas, IncDocument7 pagesIntercity Passenger Rail: J A. H, Parsons Brinckerhoff Quade & Douglas, IncmasoudNo ratings yet
- Design of Urban Electric BusDocument29 pagesDesign of Urban Electric BusMuhammad SaalihNo ratings yet
- Monorail - An Alternative Solution For The Urban T PDFDocument9 pagesMonorail - An Alternative Solution For The Urban T PDFAndy100% (1)
- Research Paper On Freight TransportationDocument8 pagesResearch Paper On Freight Transportationgz8jpg31100% (1)
- Applied Sciences: Intelligent Total Transportation Management System For Future Smart CitiesDocument31 pagesApplied Sciences: Intelligent Total Transportation Management System For Future Smart CitiesManjusha ZalteNo ratings yet
- Alimentation Pas Le Sol 2 - FinalpolisDocument17 pagesAlimentation Pas Le Sol 2 - FinalpolisIvan TaquesNo ratings yet
- Challenge of Intelligent Transport System: October 2016Document5 pagesChallenge of Intelligent Transport System: October 2016Getz23No ratings yet
- PNB Metlife MMTPDocument20 pagesPNB Metlife MMTPKiran KumarNo ratings yet
- PORTFOLIODocument71 pagesPORTFOLIOKiran KumarNo ratings yet
- E-Insurance Account (eIA) Opening Form For IndividualsDocument3 pagesE-Insurance Account (eIA) Opening Form For IndividualsKiran KumarNo ratings yet
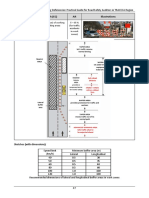
- Possible Safe Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasure With (EC) AR IllustrationsDocument8 pagesPossible Safe Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasure With (EC) AR IllustrationsKiran KumarNo ratings yet
- Possible Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasure With (EC) AR IllustrationsDocument8 pagesPossible Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasure With (EC) AR IllustrationsKiran KumarNo ratings yet
- 04 RSA Practical Guide EN 2016 8Document6 pages04 RSA Practical Guide EN 2016 8Kiran KumarNo ratings yet
- Possible Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasures With (EC) AR IllustrationsDocument8 pagesPossible Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasures With (EC) AR IllustrationsKiran KumarNo ratings yet
- Zerotohero Python3 170809030243Document96 pagesZerotohero Python3 170809030243Kiran KumarNo ratings yet
- Possible Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasure With (EC) AR IllustrationsDocument8 pagesPossible Countermeasures With Expected Costs (EC) and Accident Reductions (AR) : Countermeasure With (EC) AR IllustrationsKiran KumarNo ratings yet
- Road Safety Audits Practical Guide For Road Safety AuditorsDocument8 pagesRoad Safety Audits Practical Guide For Road Safety AuditorsKiran Kumar100% (1)
- Urban Freight Transport Planning & Management - Final PDFDocument126 pagesUrban Freight Transport Planning & Management - Final PDFKiran KumarNo ratings yet
- Countermeasure With (EC) AR IllustrationsDocument8 pagesCountermeasure With (EC) AR IllustrationsKiran KumarNo ratings yet
- Zerotohero Python3 170809030243Document96 pagesZerotohero Python3 170809030243Kiran KumarNo ratings yet
- Verification of Road Accident Simulation Created WDocument11 pagesVerification of Road Accident Simulation Created WKiran KumarNo ratings yet
- Traffic Accident Investigation Process: A Case Study in Panipat District of Haryana State, IndiaDocument6 pagesTraffic Accident Investigation Process: A Case Study in Panipat District of Haryana State, IndiaKiran KumarNo ratings yet
- The Accuracy Analysis of Measurement Tools For Traffic Accident InvestigationDocument10 pagesThe Accuracy Analysis of Measurement Tools For Traffic Accident InvestigationKiran KumarNo ratings yet
- Java High Speed Train ProjectDocument26 pagesJava High Speed Train Projectkekipi100% (3)
- Monorail ThesisDocument7 pagesMonorail Thesisjillcrawfordbaltimore100% (2)
- Fitch Egypt Country Risk Report - 2023-05-24Document55 pagesFitch Egypt Country Risk Report - 2023-05-24SwissFm Cleaning CaptainsNo ratings yet
- Environmental Noise Directive Development of Action Plans For RailwaysDocument30 pagesEnvironmental Noise Directive Development of Action Plans For RailwaysRaluca Ioana ChiuzbaianNo ratings yet
- Risk Management in Railway During Operation and Maintenance Period: A Literature ReviewDocument8 pagesRisk Management in Railway During Operation and Maintenance Period: A Literature ReviewWaqar HassanNo ratings yet
- Development of Class 800/801 High-Speed Rolling Stock For UK Intercity Express ProgrammeDocument9 pagesDevelopment of Class 800/801 High-Speed Rolling Stock For UK Intercity Express Programmemutiara kurniaNo ratings yet
- Case Study Cadre International Tod CentreDocument46 pagesCase Study Cadre International Tod CentrePRAVINSURYA B (RA1911201010001)No ratings yet
- Demo Only: Thai Airways International PCLDocument10 pagesDemo Only: Thai Airways International PCLTulakarn PccplNo ratings yet
- Global Rail Wheel Market 2017 by Global Growth, Share, Trends, Demand and Analysis Report Forecasts To 2022: Global QYResearchDocument10 pagesGlobal Rail Wheel Market 2017 by Global Growth, Share, Trends, Demand and Analysis Report Forecasts To 2022: Global QYResearchSaurabhNo ratings yet
- Diesel Vs Electrical LocoDocument2 pagesDiesel Vs Electrical LocomajjisatNo ratings yet
- Singapore High Speed Rail Project 2017Document14 pagesSingapore High Speed Rail Project 2017Jigisha VasaNo ratings yet
- Tokyo ItineraryDocument6 pagesTokyo ItineraryAlexandra Nicole CabaelNo ratings yet
- Bullet TrainDocument8 pagesBullet Train13887No ratings yet
- Maglev ReportDocument64 pagesMaglev Reportengineer63No ratings yet
- Sarwant IM Deck V10Document41 pagesSarwant IM Deck V10Efe TurkyılmazNo ratings yet
- Shanghai's Maglev Project: - Levitating Beyond Transportation TheoryDocument8 pagesShanghai's Maglev Project: - Levitating Beyond Transportation TheoryPolina ChebotarNo ratings yet
- Altamont Revival Press ReleaseDocument3 pagesAltamont Revival Press ReleaserobertianNo ratings yet
- Comprail 2012: 13 International Conference On Design and Operation in Railway EngineeringDocument4 pagesComprail 2012: 13 International Conference On Design and Operation in Railway Engineeringakyadav66No ratings yet
- MA1 - Workbook - 2-2024Document119 pagesMA1 - Workbook - 2-2024Loan VũNo ratings yet
- Vossloh System 300 ENDocument26 pagesVossloh System 300 ENToni Garrote FerreroNo ratings yet
- The New Gotthard Rail LinkDocument48 pagesThe New Gotthard Rail Linkhugo alacaNo ratings yet
- High Speed RailDocument24 pagesHigh Speed RailmattNo ratings yet
- Rail SyStem SeRviceS - Bureau VeritasDocument4 pagesRail SyStem SeRviceS - Bureau VeritasMago_88No ratings yet
- Ato WebinarDocument119 pagesAto WebinarMario MNo ratings yet
- Uic Atlas High Speed 2021Document200 pagesUic Atlas High Speed 2021JUAN CAMILO VIVARES GÓMEZ100% (1)
- Review and Prospect of Maintenance Technology ForDocument20 pagesReview and Prospect of Maintenance Technology Formonatammam991No ratings yet
- Example Answer: Practice Test 1 Section 1 Questions 1 - 10 Questions 1 - 5 Complete The Form BelowDocument48 pagesExample Answer: Practice Test 1 Section 1 Questions 1 - 10 Questions 1 - 5 Complete The Form BelowDương Thanh VânNo ratings yet
- High Speed Indian Railways-Future of Travel: BY Akshay KhatriDocument16 pagesHigh Speed Indian Railways-Future of Travel: BY Akshay KhatrigurujiNo ratings yet
- Chapter 1 Basics of Railway PDFDocument78 pagesChapter 1 Basics of Railway PDFdilnessa azanawNo ratings yet
- Hitachi 簡報Document15 pagesHitachi 簡報靖楓No ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItFrom EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItRating: 4 out of 5 stars4/5 (25)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyFrom EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyRating: 5 out of 5 stars5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeFrom EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeRating: 4 out of 5 stars4/5 (9)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Gas Turbines: A Handbook of Air, Land and Sea ApplicationsFrom EverandGas Turbines: A Handbook of Air, Land and Sea ApplicationsRating: 4 out of 5 stars4/5 (9)
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Piping Design for Industrial Facilities: Understanding Codes and StandardsFrom EverandPiping Design for Industrial Facilities: Understanding Codes and StandardsRating: 4 out of 5 stars4/5 (1)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet