You might also like
- Op Amp ThesisDocument7 pagesOp Amp Thesisemilyjoneswashington100% (2)
- Op Amp Circuits GuideDocument11 pagesOp Amp Circuits Guidelibrian_30005821No ratings yet
- Lab 9 Operational Amplifier Applications I: PurposeDocument4 pagesLab 9 Operational Amplifier Applications I: PurposenotarajordanNo ratings yet
- OpampDocument19 pagesOpampAnto PellisseryNo ratings yet
- RepoDocument18 pagesRepoAaditya BaidNo ratings yet
- Lab 1 PSpice Op - Amp - BasicsDocument13 pagesLab 1 PSpice Op - Amp - BasicsTooba ArshadNo ratings yet
- IntroopampsDocument11 pagesIntroopampsalexNo ratings yet
- DIY Op Amp (By Nelson Pass)Document11 pagesDIY Op Amp (By Nelson Pass)MechDR100% (1)
- Operational AmplifierDocument19 pagesOperational AmplifierTanvir Ahmed MunnaNo ratings yet
- Operational amplifier guideDocument25 pagesOperational amplifier guideNeha KadamNo ratings yet
- Prelab3 OpampDocument6 pagesPrelab3 OpampThinh NguyễnNo ratings yet
- Learning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsDocument9 pagesLearning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsArnav KushwahaNo ratings yet
- Lab No. 2 Title: Simulating Opamp Circuit Transient Response in Pspice To Verify The Gain of The CircuitDocument10 pagesLab No. 2 Title: Simulating Opamp Circuit Transient Response in Pspice To Verify The Gain of The Circuitlearner guyNo ratings yet
- Operation La Amp EngDocument20 pagesOperation La Amp Engshaligram_2000No ratings yet
- An Operational AmplifierDocument22 pagesAn Operational Amplifierpvaibhav08No ratings yet
- Modelling of Operational Amplifier by Using CMOS Technology: VSRD-IJEECE, Vol. 2 (6), 2012, 330-336Document7 pagesModelling of Operational Amplifier by Using CMOS Technology: VSRD-IJEECE, Vol. 2 (6), 2012, 330-336Akash VermaNo ratings yet
- Op-Amps: Experiment Guide: Part 1: Noninverting Amplifier (A) DC MeasurementsDocument4 pagesOp-Amps: Experiment Guide: Part 1: Noninverting Amplifier (A) DC MeasurementsRohini PalanisamyNo ratings yet
- Industrial Experiment 1 Op-Amp CircuitsDocument16 pagesIndustrial Experiment 1 Op-Amp CircuitsJazmyn Joyce Del MundoNo ratings yet
- Lab7 Design Project1Document11 pagesLab7 Design Project1api-732295437No ratings yet
- Advanced Electronics Lab ManualDocument88 pagesAdvanced Electronics Lab ManualsmganorkarNo ratings yet
- Biomedical Basic ElectronicDocument8 pagesBiomedical Basic ElectronicIsmael MontillaNo ratings yet
- Notes OpAmp F05 PDFDocument8 pagesNotes OpAmp F05 PDFmouneshskNo ratings yet
- Precision Rectifiers: Elliott Sound ProductsDocument12 pagesPrecision Rectifiers: Elliott Sound ProductsDRAGAN ANDRICNo ratings yet
- ContinueDocument3 pagesContinuesamanth0404No ratings yet
- Do It Your Self OpampDocument20 pagesDo It Your Self OpampdudulemarcNo ratings yet
- Biasing Op-Amps into Class A with Current SourcesDocument11 pagesBiasing Op-Amps into Class A with Current SourcessddfsdcascNo ratings yet
- Operational Amplifiers Basics, Characteristics, Types and ApplicationsDocument14 pagesOperational Amplifiers Basics, Characteristics, Types and ApplicationsSanjay BalwaniNo ratings yet
- Op Amp Using PspiceDocument18 pagesOp Amp Using PspiceSathish BalaNo ratings yet
- Op Amps: Author: William Snyder Lab Partner: Brad Clark Professor: Dr. Robert Tyce 3/29/2011Document14 pagesOp Amps: Author: William Snyder Lab Partner: Brad Clark Professor: Dr. Robert Tyce 3/29/2011Jim RumenNo ratings yet
- EE 306 - Electrical Engineering LaboratoryDocument6 pagesEE 306 - Electrical Engineering LaboratoryMohammed KhouliNo ratings yet
- Amplifier Specifications and ApplicationsDocument10 pagesAmplifier Specifications and Applicationskaushal4053No ratings yet
- Emailing 300 TOP Operational Amplifiers Questions and Answers OP-AMP - PDF Version 1Document15 pagesEmailing 300 TOP Operational Amplifiers Questions and Answers OP-AMP - PDF Version 1Jesan tonikNo ratings yet
- EEE 311 Lab Report 3Document16 pagesEEE 311 Lab Report 3Anik Saha Toni 1912619643No ratings yet
- AIA9-Op-amp Circuits and AmplifierDocument53 pagesAIA9-Op-amp Circuits and AmplifierABDELRAHMAN REDA MAAMOUN ELSAID SEYAM A19EM0638No ratings yet
- Amplificador Operacional Otimo PDFDocument12 pagesAmplificador Operacional Otimo PDFcustodioNo ratings yet
- Unit 2: Definition of IcDocument26 pagesUnit 2: Definition of Icsai kiranNo ratings yet
- Experiment VIIDocument16 pagesExperiment VIIjjuskiewiczNo ratings yet
- How To Buffer An Op-Amp Output For Higher Current Part 1Document8 pagesHow To Buffer An Op-Amp Output For Higher Current Part 1adalberto soplatetasNo ratings yet
- OP-AMP AND OTA BASICS EXPLAINEDDocument41 pagesOP-AMP AND OTA BASICS EXPLAINEDAman VatsNo ratings yet
- Term Paper: "Analog Circuits and Linear Ic'S"Document17 pagesTerm Paper: "Analog Circuits and Linear Ic'S"Deep Chand SinglaNo ratings yet
- MT 061Document5 pagesMT 061Miguel TorresNo ratings yet
- Ir Music Transmitter and ReceiverDocument34 pagesIr Music Transmitter and ReceivergundapanenianushaNo ratings yet
- Operational Amplifier: From Wikipedia, The Free EncyclopediaDocument18 pagesOperational Amplifier: From Wikipedia, The Free EncyclopedianuskhanNo ratings yet
- Lab 9Document5 pagesLab 9gratz_redobleNo ratings yet
- Introduction To Amplifier DesignDocument6 pagesIntroduction To Amplifier Designdragos62bondar100% (1)
- Full Report - E1Document13 pagesFull Report - E1Naddy MohdNo ratings yet
- LM 107 DatasheetDocument18 pagesLM 107 DatasheetAhmed AsnagNo ratings yet
- Op Amp Bandwidth BasicsDocument6 pagesOp Amp Bandwidth BasicsnkncnNo ratings yet
- Physics AssignmentDocument21 pagesPhysics Assignmentromiifree0% (1)
- EE313PROJECTRAPORDocument12 pagesEE313PROJECTRAPORdnthrtm3No ratings yet
- Op Amp Design ThesisDocument5 pagesOp Amp Design Thesismaryburgsiouxfalls100% (2)
- Differentiator and IntegratorDocument5 pagesDifferentiator and Integratorvinit.vermaNo ratings yet
- Operational AmplifierDocument8 pagesOperational AmplifierAditya ChoudharyNo ratings yet
- Lab 2: Intermediate Circuits and Nonlinear Components: Massachusetts Institute of TechnologyDocument8 pagesLab 2: Intermediate Circuits and Nonlinear Components: Massachusetts Institute of TechnologyYudi JoeNo ratings yet
- AIC LAB Manual - Cycle 1Document30 pagesAIC LAB Manual - Cycle 1Dinesh GaikotiNo ratings yet
- OTA DesignDocument18 pagesOTA DesignAnandNo ratings yet
- ELEC 3509 Lab 3 - NewDocument17 pagesELEC 3509 Lab 3 - New孫笑川258No ratings yet
- Project 14 Bridging Adapter Doubles PowerDocument5 pagesProject 14 Bridging Adapter Doubles Powermdkadry100% (1)
- Basic Features of An Op AmpDocument4 pagesBasic Features of An Op AmpJuman RehmanNo ratings yet
- TIPD128 CapacitiveLoadDrive CapacitiveLoadDriveSolutionUsingAnIsolationResistor Tidu032cDocument28 pagesTIPD128 CapacitiveLoadDrive CapacitiveLoadDriveSolutionUsingAnIsolationResistor Tidu032cLudovico SilvinoNo ratings yet
- Lmx58-N Low-Power, Dual-Operational Amplifiers: 1 Features 3 DescriptionDocument38 pagesLmx58-N Low-Power, Dual-Operational Amplifiers: 1 Features 3 DescriptionEliezer OcantoNo ratings yet
- Xilinx Cost-Optimized-Product-Selection-Guide PDFDocument15 pagesXilinx Cost-Optimized-Product-Selection-Guide PDFChao DongNo ratings yet
- Inkscape Manuals Readthedocs Io en LatestDocument238 pagesInkscape Manuals Readthedocs Io en LatestRuben BarrosNo ratings yet
- LM 117 HVDocument28 pagesLM 117 HVLudovico SilvinoNo ratings yet
- Optix MAG342CQRDocument2 pagesOptix MAG342CQRLudovico SilvinoNo ratings yet
- ECEN 474 Lab 8: Two-Stage Miller OpampDocument9 pagesECEN 474 Lab 8: Two-Stage Miller OpampkaanNo ratings yet
- RRB-JE Sample Practice Test QuestionsDocument11 pagesRRB-JE Sample Practice Test QuestionsSelva Hemilda PNo ratings yet
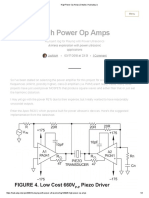
- High Power Op Amps - Details - HackadayDocument3 pagesHigh Power Op Amps - Details - HackadaydtramirNo ratings yet
- Simple Burglar Alarm Circuit Using LDR and 555 Timer ICDocument13 pagesSimple Burglar Alarm Circuit Using LDR and 555 Timer ICZaid Masood100% (2)
- Absract For Reverse Parking Sensor CircuitDocument4 pagesAbsract For Reverse Parking Sensor CircuitKïshörë100% (1)
- Simplifier Mk2Document13 pagesSimplifier Mk2Juan Pablo CanalesNo ratings yet
- My Project ProposalDocument5 pagesMy Project ProposalziaulhaqNo ratings yet
- Lab 1 Operational AmplifiersDocument12 pagesLab 1 Operational AmplifiersChris BrownNo ratings yet
- Ecd Lab 8TH SemDocument16 pagesEcd Lab 8TH SemNXTEN sportsNo ratings yet
- Building Blocks of Integrated Circuit Amplifiers:: ECE 3120 Microelectronics II Dr. Suketu NaikDocument19 pagesBuilding Blocks of Integrated Circuit Amplifiers:: ECE 3120 Microelectronics II Dr. Suketu NaikSameh SherifNo ratings yet
- Erno Borbely Fet Articel 2Document5 pagesErno Borbely Fet Articel 2Srdjan ProkicNo ratings yet
- Lecture 3 - BJT AC AnalysisDocument28 pagesLecture 3 - BJT AC AnalysisVievie Le BluewberrietrufflesNo ratings yet
- LIC EEE-Multiple Choice Questions 2017Document11 pagesLIC EEE-Multiple Choice Questions 2017jagan40% (5)
- Ateneo de Zamboanga University Engineering Lab WorksheetDocument4 pagesAteneo de Zamboanga University Engineering Lab WorksheetMargret DequitoNo ratings yet
- Multisim OscillatorDocument5 pagesMultisim OscillatorJack bowmanNo ratings yet
- Expandable 70W to 300W instrument amplifier with modular TDA7293/4 designDocument5 pagesExpandable 70W to 300W instrument amplifier with modular TDA7293/4 designsanapashoksNo ratings yet
- Raising Leaders: BJT Biasing Circuits ExplainedDocument19 pagesRaising Leaders: BJT Biasing Circuits ExplainedObaloluwa SowandeNo ratings yet
- Amplifier and Its Application Complete Presentation SlidesDocument21 pagesAmplifier and Its Application Complete Presentation SlidesRameen ArifNo ratings yet
- CH 3 Operational AmplifiersDocument14 pagesCH 3 Operational AmplifiersRagnar LothbrokNo ratings yet
- Blockk PDFDocument5 pagesBlockk PDFIsaias Bartolomeu SambgaNo ratings yet
- Electrical Engineering Network Lab Negative Impedance Converter & Gyrator Circuit ExperimentsDocument5 pagesElectrical Engineering Network Lab Negative Impedance Converter & Gyrator Circuit ExperimentsAkhilesh Kumar MishraNo ratings yet
- Descriptio Features: Lt1370 500Khz High Efficiency 6A Switching RegulatorDocument16 pagesDescriptio Features: Lt1370 500Khz High Efficiency 6A Switching RegulatorvvvNo ratings yet
- Ultrasonic Receiver Circuit Using OpampDocument3 pagesUltrasonic Receiver Circuit Using OpampPERVEZ AHMAD KHANNo ratings yet
- Appendix - Equations v3Document4 pagesAppendix - Equations v3ALEN chiaNo ratings yet
- Design and simulation of op amp integratorDocument5 pagesDesign and simulation of op amp integratordianseptyaNo ratings yet
- Chapter 15. The Operational Amplifier AbstractionDocument1 pageChapter 15. The Operational Amplifier AbstractionJokerTHNo ratings yet
- Analog Circuts by Pramod Agrawal From Iit RookeeDocument168 pagesAnalog Circuts by Pramod Agrawal From Iit Rookeebalu2103100% (1)
- 555 Timer MultivibratorfinalDocument16 pages555 Timer Multivibratorfinalranjeetsingh13112005No ratings yet
- Kia7805pi PDFDocument1 pageKia7805pi PDFAnderson MohrrNo ratings yet
- CS AmplifierDocument7 pagesCS AmplifiersamactrangNo ratings yet