You might also like
- Local Binary Pattern PDFDocument8 pagesLocal Binary Pattern PDFAshishKumarNo ratings yet
- Completed Modeling of Local Binary Pattern Operator for Texture ClassificationDocument7 pagesCompleted Modeling of Local Binary Pattern Operator for Texture Classificationamir11601No ratings yet
- An FFT-based Technique For Translation Rotation and Scale-Invariant Image Registration-5Z5Document6 pagesAn FFT-based Technique For Translation Rotation and Scale-Invariant Image Registration-5Z5ArchNo ratings yet
- Biomedical Engineering Dr. Mohannad K. Sabir Histogram ProcessingDocument37 pagesBiomedical Engineering Dr. Mohannad K. Sabir Histogram Processingsnake teethNo ratings yet
- LEEBPDocument11 pagesLEEBPSuchi ReddyNo ratings yet
- Intensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3Document25 pagesIntensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3Snehal ChotheNo ratings yet
- An Introduction T o The Log-Polar MappingDocument6 pagesAn Introduction T o The Log-Polar MappingcamtuthienNo ratings yet
- Exploring The Radon and Trace TransformsDocument8 pagesExploring The Radon and Trace TransformsIgor GartziaNo ratings yet
- Image Registration: John AshburnerDocument55 pagesImage Registration: John AshburnerMohit BhavsarNo ratings yet
- Digital Image Processing (Chapter 3) PDFDocument84 pagesDigital Image Processing (Chapter 3) PDFmna shourovNo ratings yet
- Fourier TransformDocument8 pagesFourier TransformAnthony LunaNo ratings yet
- Image and Video Description With Local Binary Pattern Variants CVPR Tutorial FinalDocument87 pagesImage and Video Description With Local Binary Pattern Variants CVPR Tutorial FinalDũng Cù ViệtNo ratings yet
- LBP HogDocument49 pagesLBP HogSayem HasanNo ratings yet
- 3D Rotation Invariant Local Binary PatternsDocument5 pages3D Rotation Invariant Local Binary PatternsAshishKumarNo ratings yet
- Point Operations and Spatial FilteringDocument22 pagesPoint Operations and Spatial FilteringAnonymous Tph9x741No ratings yet
- CS-419: Applied Image Processing: Dr. Muhammad HanifDocument64 pagesCS-419: Applied Image Processing: Dr. Muhammad HanifSarim JawadNo ratings yet
- Digital Image Enhancement TechniquesDocument79 pagesDigital Image Enhancement Techniquesvaibhav rajNo ratings yet
- H (R) N P (R) N /MN: Is The KTH Intensity Value and NDocument4 pagesH (R) N P (R) N /MN: Is The KTH Intensity Value and NKrishanu ModakNo ratings yet
- MTF model for Bayer pattern color detectorsDocument7 pagesMTF model for Bayer pattern color detectorswavelet5No ratings yet
- Intensity Transformations and Spatial Filtering: Instructor Engr DR Muhammad Jamil KhanDocument52 pagesIntensity Transformations and Spatial Filtering: Instructor Engr DR Muhammad Jamil KhanNaimal MasoodNo ratings yet
- Content-based Image Retrieval Using Gabor Texture FeaturesDocument4 pagesContent-based Image Retrieval Using Gabor Texture FeaturesAshwini NayakNo ratings yet
- 2005 SolveDocument16 pages2005 SolveAnirbaan SahaNo ratings yet
- Spatial Domain Filtering and Intensity TransformationsDocument57 pagesSpatial Domain Filtering and Intensity TransformationsmpjuserNo ratings yet
- Shift Selectivity of The Collinear Holographic Storage SystemDocument3 pagesShift Selectivity of The Collinear Holographic Storage SystemChang MingNo ratings yet
- Chapter-2 (Part-1)Document17 pagesChapter-2 (Part-1)Krithika KNo ratings yet
- Histogram ProcessingDocument27 pagesHistogram ProcessingRakesh InaniNo ratings yet
- 2009-01-Muti-Focus Image Fusion Using Wavelet Based Contour Let Transform and Region-Rs 25 000Document4 pages2009-01-Muti-Focus Image Fusion Using Wavelet Based Contour Let Transform and Region-Rs 25 000Tushar WalseNo ratings yet
- Lecture 3.2 Image EnhancementDocument76 pagesLecture 3.2 Image EnhancementdaveNo ratings yet
- Asift AsiftDocument11 pagesAsift AsiftHaris MasoodNo ratings yet
- Fingerprint Matching in 4 Steps: Segmentation, Normalization, Minutiae Extraction & MatchingDocument6 pagesFingerprint Matching in 4 Steps: Segmentation, Normalization, Minutiae Extraction & MatchingJitendra NaikNo ratings yet
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroRana UsmanNo ratings yet
- Image Enhancement in Spatial DomainDocument24 pagesImage Enhancement in Spatial DomainDeepashri_HKNo ratings yet
- Image Information Retrieval From Incomplete Queries Using Color and Shape FeaturesDocument8 pagesImage Information Retrieval From Incomplete Queries Using Color and Shape FeaturessipijNo ratings yet
- Weak Measurement On Optical Systems: Mid Term Report of BS-MS Project (PH-5101)Document11 pagesWeak Measurement On Optical Systems: Mid Term Report of BS-MS Project (PH-5101)Sayandip DharaNo ratings yet
- Improved Approach For Mobile Robotics in Pattern Recognition 3DDocument8 pagesImproved Approach For Mobile Robotics in Pattern Recognition 3DSelva GanapathyNo ratings yet
- Texture Segmentation Using LBPDocument5 pagesTexture Segmentation Using LBPG.m. RajaNo ratings yet
- IEEE Paper Format New-Technical Paper Repaired)Document8 pagesIEEE Paper Format New-Technical Paper Repaired)Faris AhmadNo ratings yet
- Histogram ReportDocument8 pagesHistogram ReportPhạm Ngọc HảiNo ratings yet
- Rad FourierDocument10 pagesRad Fourierpapuca papucaNo ratings yet
- Inverse Kinematics Computation in Robotics Using Conformal Geometric AlgebraDocument5 pagesInverse Kinematics Computation in Robotics Using Conformal Geometric AlgebraSyifaul L AhmadNo ratings yet
- Explicit Matrix Representation For NURBS Curves and SurfacesDocument11 pagesExplicit Matrix Representation For NURBS Curves and Surfaces林北煎包侠No ratings yet
- Automatic Number Plate Recognition System: Hakob Sarukhanyan, Souren Alaverdyan, and Grigor PetrosyanDocument4 pagesAutomatic Number Plate Recognition System: Hakob Sarukhanyan, Souren Alaverdyan, and Grigor PetrosyanVelagapudi RamakrishnaNo ratings yet
- 2 D2 DGeometric Transformation InvDocument8 pages2 D2 DGeometric Transformation InvLuCIAn Muresan SPYing Reality DreamNo ratings yet
- Image EnhancementDocument14 pagesImage EnhancementPrajwal PrakashNo ratings yet
- UNIT2_SPATIAL_DOMAIN_ENHACEMENT(PART 1).pptxDocument141 pagesUNIT2_SPATIAL_DOMAIN_ENHACEMENT(PART 1).pptxLEKHANo ratings yet
- Image MorphingDocument30 pagesImage Morphingthinh_854No ratings yet
- Digital Image Processing 2 Lecture 4 PDFDocument45 pagesDigital Image Processing 2 Lecture 4 PDFsnake teethNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument8 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistssurvey obiharitaNo ratings yet
- Kroon Paper BostonDocument4 pagesKroon Paper BostonsmitapradhanNo ratings yet
- Generalised Hough TransformDocument14 pagesGeneralised Hough TransformMichelle HoltNo ratings yet
- HTI - Computer Graphics Course - LecDocument15 pagesHTI - Computer Graphics Course - Lecمحمود إبراهيمNo ratings yet
- Simulink Modelling of Radon and Wavelet Transforms for Image Feature ExtractionDocument7 pagesSimulink Modelling of Radon and Wavelet Transforms for Image Feature ExtractionjebileeNo ratings yet
- CTMs for CBIR Using Color & TextureDocument4 pagesCTMs for CBIR Using Color & TextureEdwin SinghNo ratings yet
- ECE - DIP - Unit 4Document43 pagesECE - DIP - Unit 4Maheswaran UmaiyorupaganNo ratings yet
- Texture Segmentation Using LBP Region CompetitionDocument7 pagesTexture Segmentation Using LBP Region CompetitionzhalanNo ratings yet
- Robust Face Recognition Under Difficult Lighting ConditionsDocument4 pagesRobust Face Recognition Under Difficult Lighting ConditionsijecctNo ratings yet
- Cs SFLCT DraftDocument5 pagesCs SFLCT DraftjebileeNo ratings yet
- Image Sampling and QuantizationDocument41 pagesImage Sampling and QuantizationNISHA100% (1)
- Adaptive Directional Image Compression With: Francois Meyer, and Ronald R. CoifmanDocument4 pagesAdaptive Directional Image Compression With: Francois Meyer, and Ronald R. CoifmansanatishirinNo ratings yet
- Last Minute Reviewer for 2019 Bar ExamDocument19 pagesLast Minute Reviewer for 2019 Bar ExamFrances Ann Teves100% (1)
- Event Management Study Material Free PDFDocument2 pagesEvent Management Study Material Free PDFKim0% (1)
- Quiz 1 Answers Fusionné CompresséDocument161 pagesQuiz 1 Answers Fusionné CompresséSlim Charni100% (1)
- C. Corpo DigestDocument9 pagesC. Corpo DigestRaymarc Elizer AsuncionNo ratings yet
- DMC Bored Cast in Situ Pile ConcretingDocument38 pagesDMC Bored Cast in Situ Pile Concretingmaansi jakkidi100% (1)
- Agreement: /ECE/324/Rev.2/Add.127 /ECE/TRANS/505/Rev.2/Add.127Document29 pagesAgreement: /ECE/324/Rev.2/Add.127 /ECE/TRANS/505/Rev.2/Add.127Mina RemonNo ratings yet
- Battery Calculations For Fire Alarm and Signaling SystemsDocument7 pagesBattery Calculations For Fire Alarm and Signaling Systemsleland macasinag100% (1)
- Datasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Document5 pagesDatasheet of DS 7608NI Q1 - 8P NVRD - V4.71.200 - 20220705Gherel TocasNo ratings yet
- TMA2 12 09 2021 UploadDocument3 pagesTMA2 12 09 2021 UploadG.G. PRABHATH CHINTHAKANo ratings yet
- Genetic Modified FoodDocument16 pagesGenetic Modified FoodKishoNo ratings yet
- Tle 6 Ict Q4 M9Document16 pagesTle 6 Ict Q4 M9Christ Khayzee R. BacalsoNo ratings yet
- Nse3 FortiClient Quiz Attempt Review - CopieDocument4 pagesNse3 FortiClient Quiz Attempt Review - Copieking jumper343100% (1)
- The 2012 FedEx Ketchum Social Business StudyDocument40 pagesThe 2012 FedEx Ketchum Social Business StudyEric PrenenNo ratings yet
- Importance of Communication by ThiruvalluvarDocument7 pagesImportance of Communication by ThiruvalluvarRamavallabhanNo ratings yet
- Crim Cases MidtermsDocument76 pagesCrim Cases MidtermsCoreine Valledor-SarragaNo ratings yet
- Physical security system essentialsDocument5 pagesPhysical security system essentialsLindo Gondales Jr.No ratings yet
- Case Study - NISSANDocument5 pagesCase Study - NISSANChristy BuiNo ratings yet
- Lecture 08Document27 pagesLecture 08simraNo ratings yet
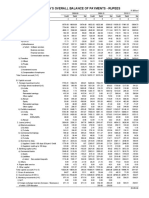
- Table 141: India'S Overall Balance of Payments - RupeesDocument2 pagesTable 141: India'S Overall Balance of Payments - Rupeesmahbobullah rahmaniNo ratings yet
- Production AnalysisDocument15 pagesProduction AnalysisAman -BCOMNo ratings yet
- Rapidcure: Corrosion Management Products Rapidcure UwDocument1 pageRapidcure: Corrosion Management Products Rapidcure UwHeramb TrifaleyNo ratings yet
- Chiang Kai Shek School v. CA (1989)Document2 pagesChiang Kai Shek School v. CA (1989)Amber AncaNo ratings yet
- The Spanish-American War (History 70)Document11 pagesThe Spanish-American War (History 70)Tine AtaamNo ratings yet
- Hospital Management System Synopsis and Project ReportDocument152 pagesHospital Management System Synopsis and Project ReportKapil Vermani100% (1)
- Operation Manuals HCWA10NEGQ - Wired ControllerDocument2 pagesOperation Manuals HCWA10NEGQ - Wired Controllerchamara wijesuriyaNo ratings yet
- Manual Equus 810 070Document10 pagesManual Equus 810 070Juan Ramón100% (1)
- When a Free Patent is VoidDocument2 pagesWhen a Free Patent is VoidRyan AcostaNo ratings yet
- Anchoring in Bad WeatherDocument2 pagesAnchoring in Bad WeatherDujeKnezevicNo ratings yet
- Chapter 6Document53 pagesChapter 6Sam KhanNo ratings yet
- Un Authorised Sites Regularisation Within Sept 2009Document2 pagesUn Authorised Sites Regularisation Within Sept 2009Sridhara babu. N - ಶ್ರೀಧರ ಬಾಬು. ಎನ್No ratings yet