You might also like
- Everything You Need To Know About Stepper MotorsDocument7 pagesEverything You Need To Know About Stepper MotorsAbhishekNo ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Analyse Torque Characteristics of Stepper & Servo MotorsDocument14 pagesAnalyse Torque Characteristics of Stepper & Servo MotorsSUSEENDRAN VNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- An Extensive Look On Servo and Stepper MotorDocument12 pagesAn Extensive Look On Servo and Stepper MotorsajhfhfsjaNo ratings yet
- DOCU181 EN Setting Up Mechanical Specific EnergyDocument12 pagesDOCU181 EN Setting Up Mechanical Specific EnergyshadyghanemNo ratings yet
- Transmission System Design of FSAE Racing Car Based On Computer TechnologyDocument3 pagesTransmission System Design of FSAE Racing Car Based On Computer TechnologyAndres MoranNo ratings yet
- Assignment 1 - Jan 2020 - QuestionDocument5 pagesAssignment 1 - Jan 2020 - QuestionAbdul SamadNo ratings yet
- LEKX6306 Torque CurvesDocument11 pagesLEKX6306 Torque Curvesmijael1393100% (1)
- Paso A Paso General de La Tecnología de AccionamientoDocument8 pagesPaso A Paso General de La Tecnología de AccionamientoVerónica RosasNo ratings yet
- Apg OrderDocument2 pagesApg OrderFranCanavNo ratings yet
- Hoisting Commissioning ATV930 GuideDocument28 pagesHoisting Commissioning ATV930 Guidejesus perez velasquesNo ratings yet
- Torque Follower Setup Rev 1Document7 pagesTorque Follower Setup Rev 1NelsonNo ratings yet
- TSB 9-20-7Document2 pagesTSB 9-20-7ripvw01No ratings yet
- VSD Advantages, Disadvantages, Selection Criteria and Installation Tips and TricksDocument18 pagesVSD Advantages, Disadvantages, Selection Criteria and Installation Tips and TricksMike CerreroNo ratings yet
- Speed Variation Using Cone Ring Traction DriveDocument7 pagesSpeed Variation Using Cone Ring Traction DriveKedar DhongadeNo ratings yet
- Driveline Component Selection GuideDocument32 pagesDriveline Component Selection Guideseaqu3stNo ratings yet
- White Paper Determining GB Service Factors For Overhead CraneDocument9 pagesWhite Paper Determining GB Service Factors For Overhead CraneInfo ARBNo ratings yet
- CT Speed Loop TuningDocument6 pagesCT Speed Loop TuningM. Hakan KocakNo ratings yet
- Product Application Note: Comparison of Higher Performance AC Drives and AC Servo ControllersDocument9 pagesProduct Application Note: Comparison of Higher Performance AC Drives and AC Servo Controllersjroyal692974No ratings yet
- Torque Curves: Roduct NformationDocument11 pagesTorque Curves: Roduct NformationCandiano PopescuNo ratings yet
- 2010 Basic Suspension Setting Guidebook EnglishDocument14 pages2010 Basic Suspension Setting Guidebook EnglishLeonardo Block De CanioNo ratings yet
- NAVI MXF15 PTO Remote 070511 REV3Document16 pagesNAVI MXF15 PTO Remote 070511 REV3Martin Alonso Garcia GarciaNo ratings yet
- 1336 In031 - en P PDFDocument28 pages1336 In031 - en P PDFgeniunetNo ratings yet
- Understanding Inertia Ratio and Its Effect On Machine PerformanceDocument6 pagesUnderstanding Inertia Ratio and Its Effect On Machine PerformancemangyanNo ratings yet
- Image Processing of Sidescan SonarDocument7 pagesImage Processing of Sidescan SonarAlex NicksonNo ratings yet
- Design Development and Analysis of Braking System For Student Formula Race CarDocument6 pagesDesign Development and Analysis of Braking System For Student Formula Race Carabdelhameed saedNo ratings yet
- Drivetrain ReportDocument12 pagesDrivetrain Reportkushagra pandeyNo ratings yet
- Application Note CTAN #299: Simple Commander SK Torque WinderDocument9 pagesApplication Note CTAN #299: Simple Commander SK Torque Winderpictures19821982No ratings yet
- Baja and Torque Testing of RIT's Off-Road Vehicle DrivelineDocument3 pagesBaja and Torque Testing of RIT's Off-Road Vehicle DrivelineAnonymous dYDY4EhaNo ratings yet
- Caterpillar Torque Curves PDFDocument11 pagesCaterpillar Torque Curves PDFAlberto Pila Alonso100% (2)
- Load Inertia Motor SelectionDocument3 pagesLoad Inertia Motor Selectiondanferreiro8318100% (1)
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDocument54 pagesOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- PB ManualDocument23 pagesPB ManualwilyNo ratings yet
- 2.automobile IJAuERD DESIGNANDANALYSISOFBRAKEROTOR HARSHALNIKAMDocument11 pages2.automobile IJAuERD DESIGNANDANALYSISOFBRAKEROTOR HARSHALNIKAMSaleh AlotaibiNo ratings yet
- DC Motors, Stepper Motors, and Servo Motors ExplainedDocument8 pagesDC Motors, Stepper Motors, and Servo Motors ExplainedSoumen BanerjeeNo ratings yet
- KING-METER USER GUIDE FOR KM529 EBIKE DISPLAYDocument17 pagesKING-METER USER GUIDE FOR KM529 EBIKE DISPLAYCookie_PANo ratings yet
- Programming The PowertrainDocument10 pagesProgramming The PowertrainMiller Andres ArocaNo ratings yet
- Controlling Stepper Motor Via Arduino UnoDocument15 pagesControlling Stepper Motor Via Arduino UnoZahran TarekNo ratings yet
- Wheel Balancing Machine Design for Cars and MotorcyclesDocument26 pagesWheel Balancing Machine Design for Cars and MotorcyclesSrinivas100% (1)
- Brushless Vs Inverter Vs Servo MotorDocument6 pagesBrushless Vs Inverter Vs Servo MotorsolNo ratings yet
- Isuzu Transmission JR405E Model Workshop Manual PDFDocument320 pagesIsuzu Transmission JR405E Model Workshop Manual PDFdaniel_ting_192% (12)
- EE448 Lab 2 ReportDocument6 pagesEE448 Lab 2 ReportSai KiranNo ratings yet
- stepper motorDocument9 pagesstepper motortarib MunaibNo ratings yet
- Torque SteerDocument7 pagesTorque SteerAyushNo ratings yet
- DBR CalculatorDocument69 pagesDBR CalculatorSURJIT SINGHNo ratings yet
- Startup of A Synchronous non-SEW Motor Setting The Motor EncoderDocument21 pagesStartup of A Synchronous non-SEW Motor Setting The Motor EncoderrezakaihaniNo ratings yet
- AC Drives MSc2016Document21 pagesAC Drives MSc2016Mohamed Elsaid El ShallNo ratings yet
- Calculating Torque and Speed for VRC RobotsDocument2 pagesCalculating Torque and Speed for VRC RobotsNathaniel HawkesNo ratings yet
- Governors - Gas & Diesel: Application and Installation GuideDocument25 pagesGovernors - Gas & Diesel: Application and Installation GuidetarsudinNo ratings yet
- Application Guide: Load Sharing With The Altivar ATV71Document12 pagesApplication Guide: Load Sharing With The Altivar ATV71rakon88No ratings yet
- Stepper Motor PDFDocument9 pagesStepper Motor PDFΓιώργος ΔήμαςNo ratings yet
- Acfrogbleonywqaia81owrdmylnweq0sv7s D29ndviaerxaancrpbc3gpbty5m77rh-Vbw6vk1tzfcunk B5dc1ekotdg4oarih4rvaydrrryj7yjxz5ay Zp8bkedcresyykewhnddaxjcgt4rDocument2 pagesAcfrogbleonywqaia81owrdmylnweq0sv7s D29ndviaerxaancrpbc3gpbty5m77rh-Vbw6vk1tzfcunk B5dc1ekotdg4oarih4rvaydrrryj7yjxz5ay Zp8bkedcresyykewhnddaxjcgt4rjhonnyNo ratings yet
- Sensorless Vector Control SetupDocument6 pagesSensorless Vector Control SetupDavid MartinNo ratings yet
- Synchronization Manual MM14410 Rev-A 10-01Document16 pagesSynchronization Manual MM14410 Rev-A 10-01Beltazor HellboyNo ratings yet
- Design Procedure of An Electrohydraulic Drive: Srishti Sharma, Ramesh R. Lekurwale, Amith MasadeDocument6 pagesDesign Procedure of An Electrohydraulic Drive: Srishti Sharma, Ramesh R. Lekurwale, Amith MasadeAshishNo ratings yet
- FuzzyDocument68 pagesFuzzyPidikiti Surendra BabuNo ratings yet
- Indiana UniversityDocument64 pagesIndiana Universitymdasifkhan2013No ratings yet
- Manual 09G 09M InglesDocument66 pagesManual 09G 09M InglesOmar Xicotencatl100% (7)
- GeneralDocument17 pagesGeneralBradhert MayaNo ratings yet
- GeneralDocument17 pagesGeneralBradhert MayaNo ratings yet
- Kurzanleitung / Quick Guide / Instruction Courte: TSG 400 in Otis 9550Document13 pagesKurzanleitung / Quick Guide / Instruction Courte: TSG 400 in Otis 9550Bradhert MayaNo ratings yet
- Installation Instructions Kone Adf: With Device SeriesDocument12 pagesInstallation Instructions Kone Adf: With Device SeriesBradhert MayaNo ratings yet
- Installation Instructions Selcom RCF1: With Device SeriesDocument11 pagesInstallation Instructions Selcom RCF1: With Device SeriesBradhert MayaNo ratings yet
- KM-10 USER MANUAL V102.en-1Document30 pagesKM-10 USER MANUAL V102.en-1jhfbty91% (23)
- Installation Instructions Kone AdeDocument11 pagesInstallation Instructions Kone AdeBradhert MayaNo ratings yet
- 7377 Ayha Elevator ProposalDocument3 pages7377 Ayha Elevator ProposalBradhert MayaNo ratings yet
- Building AutomationDocument2 pagesBuilding AutomationBradhert MayaNo ratings yet
- Leon MK1 Cruise Control Guide - Pic Heavy - SEAT CupraDocument37 pagesLeon MK1 Cruise Control Guide - Pic Heavy - SEAT CupraProgramkoNo ratings yet
- VESDA Laserfocus Trouble Shooting GuideDocument27 pagesVESDA Laserfocus Trouble Shooting Guideesnak62100% (1)
- Service Manual: Microwave Oven TC 2250/WHDocument8 pagesService Manual: Microwave Oven TC 2250/WHTóth LászlóNo ratings yet
- SMARTBOXY - Roof-Top PremiumDocument9 pagesSMARTBOXY - Roof-Top PremiumEmanuel CezarNo ratings yet
- 6848 - PDN - Hvac Panel - GD WaldnerDocument9 pages6848 - PDN - Hvac Panel - GD WaldnerAnkita vaghelaNo ratings yet
- NN-SD686S NN-ST676M NN-ST666W NN-ST656W: Microwave OvenDocument20 pagesNN-SD686S NN-ST676M NN-ST666W NN-ST656W: Microwave Ovenrafael rinconNo ratings yet
- 2003 Nissan Altima 2.5 Serivce Manual PSDocument30 pages2003 Nissan Altima 2.5 Serivce Manual PSAndy DellingerNo ratings yet
- Service Manual: HM-DH30000UDocument112 pagesService Manual: HM-DH30000UbirovNo ratings yet
- Adc and Dac Lecture NotesDocument94 pagesAdc and Dac Lecture Notespranjal mishraNo ratings yet
- EBX RF-Admittance Level Transmitter - New - 770727180Document16 pagesEBX RF-Admittance Level Transmitter - New - 770727180Johnny Liu JohnnyNo ratings yet
- Fire Alarm System Inspection Check ListDocument2 pagesFire Alarm System Inspection Check Listupload babaNo ratings yet
- MS 9200UDLS DatasheetDocument6 pagesMS 9200UDLS DatasheetHomeroJaramilloNo ratings yet
- Sep Catalog 0212Document30 pagesSep Catalog 0212info2449No ratings yet
- VOLVO SD116DX SINGLE-DRUM ROLLER Service Repair Manual PDFDocument18 pagesVOLVO SD116DX SINGLE-DRUM ROLLER Service Repair Manual PDFfjjsjekdmmeNo ratings yet
- Qis 1250 MD Me: Technical SpecificationsDocument9 pagesQis 1250 MD Me: Technical Specificationskole_bgNo ratings yet
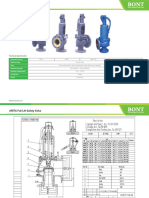
- Katalog BONT-Full Lift Safety ValveDocument8 pagesKatalog BONT-Full Lift Safety ValveAnwar MohammadNo ratings yet
- TT100 User Manual 2012 ENGL PDFDocument90 pagesTT100 User Manual 2012 ENGL PDFErika Sears100% (1)
- Afe - SiemensDocument185 pagesAfe - SiemensDavidL83No ratings yet
- Large Generator Course InfoDocument8 pagesLarge Generator Course Inforosario.md1052No ratings yet
- Three Phase Transformer Connections and BasicsDocument8 pagesThree Phase Transformer Connections and BasicsKarthick RathinasamyNo ratings yet
- Makita - Product Details - DTW1002Z 18V LXT Brushless Impact WrenchDocument1 pageMakita - Product Details - DTW1002Z 18V LXT Brushless Impact Wrenchwrya hussainNo ratings yet
- Edition 13 Electric Power Distribution in Data Centres Using L-PDUsDocument14 pagesEdition 13 Electric Power Distribution in Data Centres Using L-PDUscesarchiletNo ratings yet
- Simplified Free 2024 CalendarDocument1 pageSimplified Free 2024 CalendarkkmofamilyNo ratings yet
- DUPLEX 1400 - 15100 Basic-N EN - 2018 - 03Document8 pagesDUPLEX 1400 - 15100 Basic-N EN - 2018 - 03Constantin CilibiuNo ratings yet
- Idler selection guide for belt conveyor systemsDocument10 pagesIdler selection guide for belt conveyor systemsjavier alvarez100% (1)
- 028-Dehaco Water Distribution Skid - 3 (030408)Document3 pages028-Dehaco Water Distribution Skid - 3 (030408)brat.jose2023No ratings yet
- Manual S 821 826Document4 pagesManual S 821 826Javi González100% (1)
- 2006 Fork Service Manual Rev NCDocument46 pages2006 Fork Service Manual Rev NCkulmanenNo ratings yet
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet