You might also like
- Assembly Language 8086 Candy CrushDocument41 pagesAssembly Language 8086 Candy Crushaleena0% (1)
- Working With Time - Lab Solutions Guide: Index Type Sourcetype Interesting FieldsDocument10 pagesWorking With Time - Lab Solutions Guide: Index Type Sourcetype Interesting FieldsPreet GadhiyaNo ratings yet
- Alla Priser Anges Exkl. Moms. Kontakta Din Säljare Vid FrågorDocument46 pagesAlla Priser Anges Exkl. Moms. Kontakta Din Säljare Vid FrågorSamuelNo ratings yet
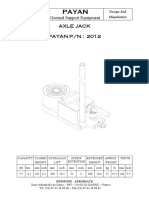
- Payan: Axle Jack PAYAN P/N: 2012Document38 pagesPayan: Axle Jack PAYAN P/N: 2012gmailNo ratings yet
- Materials: Prediction of Tool Wear Using Artificial Neural Networks During Turning of Hardened SteelDocument15 pagesMaterials: Prediction of Tool Wear Using Artificial Neural Networks During Turning of Hardened Steelrub786No ratings yet
- Condition monitoring of rotating machinery using wavelets and hidden Markov modelsDocument16 pagesCondition monitoring of rotating machinery using wavelets and hidden Markov modelsinsync_001No ratings yet
- Bearing DefectsDocument13 pagesBearing Defectsjoshibec100% (1)
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- Fuzzy Based Fault Detection and Diagnosis in Pneumatic Actuator in Cement IndustryDocument13 pagesFuzzy Based Fault Detection and Diagnosis in Pneumatic Actuator in Cement IndustryGanesh Kumar ArumugamNo ratings yet
- Ij MSSP Reyn 08aDocument21 pagesIj MSSP Reyn 08aNguyễn LaNo ratings yet
- An Intelligent Machine Condition Monitoring System UsingDocument13 pagesAn Intelligent Machine Condition Monitoring System UsingIván VillamizarNo ratings yet
- SE Fuzzy MP 2012Document10 pagesSE Fuzzy MP 2012Cristian GarciaNo ratings yet
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 pagesPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNo ratings yet
- Grabow Ska 2008Document13 pagesGrabow Ska 2008Thiago PereiraNo ratings yet
- Knock detection in SI engines using vibration analysisDocument20 pagesKnock detection in SI engines using vibration analysisCarlosNo ratings yet
- Soualhi 23769 2Document16 pagesSoualhi 23769 2Max PainNo ratings yet
- Development of An Intelligent System For Tool Wear Monitoring Applying Neural NetworksDocument6 pagesDevelopment of An Intelligent System For Tool Wear Monitoring Applying Neural Networkshari0118No ratings yet
- Mechanical Systems Hazard Estimation Using Condition MonitoringDocument13 pagesMechanical Systems Hazard Estimation Using Condition MonitoringPradeep KunduNo ratings yet
- Data-Driven Inter-Turn Short Circuit Fault Detection in Induction MachinesDocument14 pagesData-Driven Inter-Turn Short Circuit Fault Detection in Induction MachinesBadre BellaliNo ratings yet
- Deep Autoencoder Fault Detection in Electric MotorsDocument11 pagesDeep Autoencoder Fault Detection in Electric MotorsVictor SeguraNo ratings yet
- Structural Damage Diagnosis Under Varying Environmental-1 PDFDocument18 pagesStructural Damage Diagnosis Under Varying Environmental-1 PDFMR. VYSHNAV V SNo ratings yet
- The Monitoring of A Lathe Using An Artificial Neural Network - 2 Part (The Training of An Artificial Neural Network and The Experimental Setup)Document8 pagesThe Monitoring of A Lathe Using An Artificial Neural Network - 2 Part (The Training of An Artificial Neural Network and The Experimental Setup)Mradul YadavNo ratings yet
- Model-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical ModelsDocument6 pagesModel-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical Modelsejlebe mekaniNo ratings yet
- Published: April 2020 Author:: Yuan Guo, Yu Sun and Kai WuDocument15 pagesPublished: April 2020 Author:: Yuan Guo, Yu Sun and Kai WuShankar KNo ratings yet
- Ijnsa 050308Document13 pagesIjnsa 050308AIRCC - IJNSANo ratings yet
- Vibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDocument10 pagesVibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDrRajeev ChauhanNo ratings yet
- Article - PMSM - Diagnostic Court CircuitDocument22 pagesArticle - PMSM - Diagnostic Court CircuitKais AyadiNo ratings yet
- Power System Fault Classification and Prediction Based On A Three-Layer Data Mining StructureDocument18 pagesPower System Fault Classification and Prediction Based On A Three-Layer Data Mining StructureKoti ReddyNo ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Mechanical Systems and Signal Processing: Lingmi Zhang, Tong Wang, Yukio TamuraDocument13 pagesMechanical Systems and Signal Processing: Lingmi Zhang, Tong Wang, Yukio TamuraGiacomo EspositoNo ratings yet
- Online Fault Detection for Wind Energy ConvertersDocument6 pagesOnline Fault Detection for Wind Energy ConvertersmruizbarriosNo ratings yet
- Tesla 96Document8 pagesTesla 96Oμάδα 5No ratings yet
- Motor Current Signature Analysis and Fuzzy Logic Applied To The Diagnosis of Short-Circuit Faults in Induction MotorsDocument6 pagesMotor Current Signature Analysis and Fuzzy Logic Applied To The Diagnosis of Short-Circuit Faults in Induction MotorsPoonthalirNo ratings yet
- A Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiDocument14 pagesA Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiPradeep KunduNo ratings yet
- ML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDocument19 pagesML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDEE MEMUNo ratings yet
- Development_of_a_Methodology_for_ConditiDocument19 pagesDevelopment_of_a_Methodology_for_ConditiAmag2011No ratings yet
- Application - of - Structural - Analysis - To - Improve - Fault - Diagnosis - in - A - Gas - TurbineDocument18 pagesApplication - of - Structural - Analysis - To - Improve - Fault - Diagnosis - in - A - Gas - TurbineRafael Garcia IllescasNo ratings yet
- Yuanzhi Huang@ucd IeDocument22 pagesYuanzhi Huang@ucd Iehideki hidekiNo ratings yet
- Yan2006 PDFDocument16 pagesYan2006 PDFMR. VYSHNAV V SNo ratings yet
- Fault Diagnosis Power System Considering Malfunction PR CB PDFDocument6 pagesFault Diagnosis Power System Considering Malfunction PR CB PDFbdsrlNo ratings yet
- Pag. 228 235 - A REVIEW OF FAULT DIAGNOSISIN MECHATRONICS SYSTEMSDocument8 pagesPag. 228 235 - A REVIEW OF FAULT DIAGNOSISIN MECHATRONICS SYSTEMSSelahadin Al AyubNo ratings yet
- Research Projects - Dr. B.R. UpadhyayaDocument3 pagesResearch Projects - Dr. B.R. UpadhyayaprabuNo ratings yet
- Elk 2111 123Document17 pagesElk 2111 123SAHBI MARROUCHINo ratings yet
- Fuzzy Inference Systems Implemented On Neural Architectures For Motor Fault Detection and DiagnosisDocument11 pagesFuzzy Inference Systems Implemented On Neural Architectures For Motor Fault Detection and DiagnosisAliqpsk AlasadyNo ratings yet
- SP MSSP 2012Document33 pagesSP MSSP 2012Gabriel VarelaNo ratings yet
- Electronic Circuit Diagnostic Expert Systems - A Survey: Computers Math. ApplicDocument18 pagesElectronic Circuit Diagnostic Expert Systems - A Survey: Computers Math. ApplicRedaNo ratings yet
- Journal - Jpe - 16-3 - 854351307 2Document13 pagesJournal - Jpe - 16-3 - 854351307 2Behrouz MinayiNo ratings yet
- Bearing_Fault_Classification_of_InductioDocument21 pagesBearing_Fault_Classification_of_InductioAmag2011No ratings yet
- HindawiDocument11 pagesHindawiUma MaheshwarNo ratings yet
- 2007 Int'l Smart Machining Conf: Real-time Spindle Health Monitoring DesignDocument4 pages2007 Int'l Smart Machining Conf: Real-time Spindle Health Monitoring DesignVintilescu AlinaNo ratings yet
- Fault Diagnosis of Discrete Event Systems Using Hybrid Petri NetsDocument6 pagesFault Diagnosis of Discrete Event Systems Using Hybrid Petri NetsfatihaNo ratings yet
- Fault Detection Using Machine Learning TechniquesDocument47 pagesFault Detection Using Machine Learning Techniquesmlaxmiprasanna1313No ratings yet
- Phase 2 ReportDocument20 pagesPhase 2 ReportSusheel PoonjaNo ratings yet
- Machine Learning Sensors Improve Power Transformer Fault DiagnosisDocument17 pagesMachine Learning Sensors Improve Power Transformer Fault DiagnosisTrisna YuliaNo ratings yet
- Design of A Multi-Model Observer-Based Estimator For Fault Detection and Isolation (Fdi) Strategy: Application To A Chemical ReactorDocument12 pagesDesign of A Multi-Model Observer-Based Estimator For Fault Detection and Isolation (Fdi) Strategy: Application To A Chemical ReactorAfshaNo ratings yet
- Wind Turbine Condition Monitoring Based On SCADA Data Using Normal Behavior Models Part 1 System DescriptionDocument12 pagesWind Turbine Condition Monitoring Based On SCADA Data Using Normal Behavior Models Part 1 System Descriptionbendiazz3430No ratings yet
- IMECE2008-67260: Model Based System Monitor Using Artificial Neural Networks (Ann)Document8 pagesIMECE2008-67260: Model Based System Monitor Using Artificial Neural Networks (Ann)nils_erickssonNo ratings yet
- 10 4043@28990-MSDocument9 pages10 4043@28990-MSAnonymous kKXwkwXNo ratings yet
- Self-Organizing Map Approach For Classification of Mechanical and Rotor Faults On Induction MotorsDocument13 pagesSelf-Organizing Map Approach For Classification of Mechanical and Rotor Faults On Induction MotorsJosé María BossioNo ratings yet
- Fault Detection System For Centrifugal Pumps Using Neural Networks and Neuro-Fuzzy TechniquesDocument9 pagesFault Detection System For Centrifugal Pumps Using Neural Networks and Neuro-Fuzzy TechniquesTetria AdwineldaNo ratings yet
- GUO, W. Et Al 2010 - An AnalyticDocument9 pagesGUO, W. Et Al 2010 - An AnalyticJamile_P_NNo ratings yet
- X 14538532Document12 pagesX 14538532batuhanNo ratings yet
- 2017-Review Paper On SensorsDocument18 pages2017-Review Paper On Sensorshasmit prajapatiNo ratings yet
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- Models - Heat.conical Dielectric ProbeDocument28 pagesModels - Heat.conical Dielectric ProbeDenis JaissonNo ratings yet
- Reviewing Syslog Files: Guided ExerciseDocument2 pagesReviewing Syslog Files: Guided Exercise4thingyanNo ratings yet
- GATES in EUROPE - Marketing Communications MaterialDocument4 pagesGATES in EUROPE - Marketing Communications Materialadolfo lalalaNo ratings yet
- Earthing Calculation: A General Design DataDocument14 pagesEarthing Calculation: A General Design Dataمحمد الأمين سنوساوي100% (1)
- 2018 Google Dorks MasterDocument84 pages2018 Google Dorks MasterhackedNo ratings yet
- E-Tech ReviewerDocument10 pagesE-Tech ReviewerPsalm De VeraNo ratings yet
- ABB Electronic Protection DeviceDocument8 pagesABB Electronic Protection DeviceEl Haj BenazzouzNo ratings yet
- Lesson 13 StsDocument11 pagesLesson 13 StsJasmin Lloyd CarlosNo ratings yet
- Decision Support Systems: Mcgraw-Hill/IrwinDocument67 pagesDecision Support Systems: Mcgraw-Hill/IrwinAlexNo ratings yet
- Report Writing - PankajDocument13 pagesReport Writing - PankajPankaj GoyalNo ratings yet
- Online Interview Questions AnswersDocument4 pagesOnline Interview Questions AnswersafiloteNo ratings yet
- Zuellig Pharma Annual Magazine 2020 Website FinalDocument58 pagesZuellig Pharma Annual Magazine 2020 Website FinalNick aoNo ratings yet
- Appian Developer Resume Example With Appropriate SkillsDocument9 pagesAppian Developer Resume Example With Appropriate Skillspega4beulahNo ratings yet
- 22-DS-R-002 Rev 0 API 616 Turbine Data SheetDocument13 pages22-DS-R-002 Rev 0 API 616 Turbine Data SheetChike NwachukwuNo ratings yet
- Steam Utility in Chemical Process Industries: Dr. Uthirapathi VengatesonDocument21 pagesSteam Utility in Chemical Process Industries: Dr. Uthirapathi VengatesonTushar DagarNo ratings yet
- HGDGDocument57 pagesHGDGEsperdion Jr GanibeNo ratings yet
- Proper Simulation of Chemical-EOR Pilots - A Real Case Study: Sector-Model GenerationDocument2 pagesProper Simulation of Chemical-EOR Pilots - A Real Case Study: Sector-Model GenerationVeronicaNo ratings yet
- Snort LoggerDocument5 pagesSnort Loggerzacktoby74No ratings yet
- 7225 J CatalagoDocument724 pages7225 J CatalagoThiago SaraivaNo ratings yet
- Smartphone IndustryDocument5 pagesSmartphone IndustryChief MaxNo ratings yet
- Caethial's D&D Corner - Gaming Table BuildDocument25 pagesCaethial's D&D Corner - Gaming Table BuildafxxxNo ratings yet
- Production of Coated Detergent Enzyme GranulesDocument121 pagesProduction of Coated Detergent Enzyme Granulesdadang71No ratings yet
- Indira Gandhi National Open University: Course Re-Registration Form For BTCM, 2 Year (Module-II), January 2017Document9 pagesIndira Gandhi National Open University: Course Re-Registration Form For BTCM, 2 Year (Module-II), January 2017IghfigufifiNo ratings yet
- Article - AVEVA Predictive Analytics Metals and MiningDocument3 pagesArticle - AVEVA Predictive Analytics Metals and MiningJuan Manuel PardalNo ratings yet
- Foxit Reader Quick Start GuideDocument41 pagesFoxit Reader Quick Start GuideMedina BekticNo ratings yet
- PDF Vibration Analysis Level 1 CompressDocument3 pagesPDF Vibration Analysis Level 1 CompressMohammad IkbalNo ratings yet