You might also like
- Man and Historical Action PDFDocument19 pagesMan and Historical Action PDFAldrin GarciaNo ratings yet
- Math 8 DLL 4th Quarter Week 5 LC 52Document3 pagesMath 8 DLL 4th Quarter Week 5 LC 52Cesar Abajo Lingolingo Jr.No ratings yet
- Deep Network Design for Medical Image Computing: Principles and ApplicationsFrom EverandDeep Network Design for Medical Image Computing: Principles and ApplicationsNo ratings yet
- Sedai2018 Joint Segmentation Uncertainty Visualization Retinal LayersDocument8 pagesSedai2018 Joint Segmentation Uncertainty Visualization Retinal LayersbrecheisenNo ratings yet
- Inconsistency-Aware Uncertainty Estimation For Semi-Supervised Medical Image SegmentationDocument14 pagesInconsistency-Aware Uncertainty Estimation For Semi-Supervised Medical Image SegmentationRaymon ArnoldNo ratings yet
- Densereg: Fully Convolutional Dense Shape Regression In-The-WildDocument11 pagesDensereg: Fully Convolutional Dense Shape Regression In-The-WilddrewqNo ratings yet
- Osteoporosis Detection Using Machine and Deep Learning TechniquesDocument15 pagesOsteoporosis Detection Using Machine and Deep Learning TechniquesSeddik KhamousNo ratings yet
- E7732068519 PDFDocument6 pagesE7732068519 PDFAleenaNo ratings yet
- Efficient Directionality-Driven Dictionary Learning For Compressive Sensing Magnetic Resonance Imaging ReconstructionDocument14 pagesEfficient Directionality-Driven Dictionary Learning For Compressive Sensing Magnetic Resonance Imaging ReconstructionMdSalahUddinYusufNo ratings yet
- Self-Supervised Monocular Depth and Ego-Motion Estimation in Endoscopy: Appearance Flow To The RescueDocument16 pagesSelf-Supervised Monocular Depth and Ego-Motion Estimation in Endoscopy: Appearance Flow To The RescuePengZai ZhongNo ratings yet
- Implementation of Compressive Sensing For Preclinical Cine-MRIDocument9 pagesImplementation of Compressive Sensing For Preclinical Cine-MRIDiego RodriguesNo ratings yet
- Hybrid Dermoscopy Image Classification Framework Based On Deep Convolutional Neural Network and Fisher VectorDocument4 pagesHybrid Dermoscopy Image Classification Framework Based On Deep Convolutional Neural Network and Fisher VectorMd. Sazzad Mia 191-15-2503No ratings yet
- Computer Vision Experiential Learning ReportDocument20 pagesComputer Vision Experiential Learning Reportaditya.pande.btech2021No ratings yet
- Keypointnerf: Generalizing Image-Based Volumetric Avatars Using Relative Spatial Encoding of KeypointsDocument24 pagesKeypointnerf: Generalizing Image-Based Volumetric Avatars Using Relative Spatial Encoding of KeypointsPiyush DeoleNo ratings yet
- Identification of Spinal Deformity Classification With Total Curvature Analysis and Artificial Neural NetworkDocument7 pagesIdentification of Spinal Deformity Classification With Total Curvature Analysis and Artificial Neural NetworkSintaKusumaWNo ratings yet
- Neural Network Based Brain Tumor Detection Using Wireless Infrared Imaging SensorDocument15 pagesNeural Network Based Brain Tumor Detection Using Wireless Infrared Imaging SensorAnitha.c.sNo ratings yet
- Brain Tumor Classification Using Neural Network Based MethodsDocument6 pagesBrain Tumor Classification Using Neural Network Based MethodstmzNo ratings yet
- Recurrent Neural Networks For Snapshot Compressive ImagingDocument18 pagesRecurrent Neural Networks For Snapshot Compressive ImagingSergio Andrés UrreaNo ratings yet
- Deep PDFDocument6 pagesDeep PDFAnonymous Vc5ZPF8VibNo ratings yet
- 2019-Deep Optics For Monocular Depth Estimation and 3D Object DetectionDocument10 pages2019-Deep Optics For Monocular Depth Estimation and 3D Object Detectioncynorr rainNo ratings yet
- A Procedure For Training An Artificial Neural Network With Application To Tool Wear MonitoringDocument7 pagesA Procedure For Training An Artificial Neural Network With Application To Tool Wear Monitoringpurushothaman sinivasanNo ratings yet
- ChiTransformer Towards Reliable Stereo From CuesDocument11 pagesChiTransformer Towards Reliable Stereo From Cues948261817No ratings yet
- Research Article: Retinal Mosaicking With Vascular Bifurcations Detected On Vessel Mask by A Convolutional NetworkDocument14 pagesResearch Article: Retinal Mosaicking With Vascular Bifurcations Detected On Vessel Mask by A Convolutional NetworkMauricio RodriguezNo ratings yet
- Identification of Brain Tumor Using MATLABDocument4 pagesIdentification of Brain Tumor Using MATLABIJMTST-Online JournalNo ratings yet
- Part-Based Clothing Segmentation For Person RetrievalDocument6 pagesPart-Based Clothing Segmentation For Person RetrievalDebopriyo BanerjeeNo ratings yet
- RACE-Net: A Recurrent Neural Network For Biomedical Image SegmentationDocument12 pagesRACE-Net: A Recurrent Neural Network For Biomedical Image SegmentationSnehaNo ratings yet
- Real-Time Embedded Age and Gender Classification in Unconstrained VideoDocument9 pagesReal-Time Embedded Age and Gender Classification in Unconstrained VideoAnil Kumar BNo ratings yet
- SCT 3Document9 pagesSCT 3Saumya ChauhanNo ratings yet
- Correlation Method Based PCA Subspace Using Accelerated Binary Particle Swarm Optimization For Enhanced Face RecognitionDocument4 pagesCorrelation Method Based PCA Subspace Using Accelerated Binary Particle Swarm Optimization For Enhanced Face RecognitionEditor IJRITCCNo ratings yet
- An Efficient Classification Method For Knee MR Image SegmentationDocument6 pagesAn Efficient Classification Method For Knee MR Image SegmentationSiva SreeramdasNo ratings yet
- Attention-Guided Convolutional Neural Network For DetectingDocument4 pagesAttention-Guided Convolutional Neural Network For DetectingAmílcar CáceresNo ratings yet
- A Novel Hybrid Multi Spectral Image Fusion Method Using Contourlet Transform - TENCON 2009, IEEEDocument6 pagesA Novel Hybrid Multi Spectral Image Fusion Method Using Contourlet Transform - TENCON 2009, IEEEIshit MakwanaNo ratings yet
- Icip 2009Document4 pagesIcip 2009PratikNo ratings yet
- Tibia Bone Segmentation in X-Ray Images - A Comparative AnalysisDocument8 pagesTibia Bone Segmentation in X-Ray Images - A Comparative AnalysisSuzanaPetrovicNo ratings yet
- Paper BRAIN TUMOR IMAGE CLASSIFICATION MODEL WITH EFFICIENTNETB3 (1909)Document5 pagesPaper BRAIN TUMOR IMAGE CLASSIFICATION MODEL WITH EFFICIENTNETB3 (1909)Sathay AdventureNo ratings yet
- 73 1470546684 - 07-08-2016 PDFDocument3 pages73 1470546684 - 07-08-2016 PDFEditor IJRITCCNo ratings yet
- High-Accuracy Stereo Depth Maps Using Structured LightDocument8 pagesHigh-Accuracy Stereo Depth Maps Using Structured LightLuisAlbertoPadillaNo ratings yet
- The Preliminary Investigation of Ear Recognition Using Hybrid TechniqueDocument4 pagesThe Preliminary Investigation of Ear Recognition Using Hybrid TechniqueRasoolNaniNo ratings yet
- Final SynopsisDocument12 pagesFinal SynopsisyuitakanoakaNo ratings yet
- Neural Networks: Sung-Hoon Yoo, Sung-Kwun Oh, Witold PedryczDocument15 pagesNeural Networks: Sung-Hoon Yoo, Sung-Kwun Oh, Witold PedryczMario CalderonNo ratings yet
- A Deep Learning Guide To MICCAI 2015 - v2Document21 pagesA Deep Learning Guide To MICCAI 2015 - v2Prakash SinghNo ratings yet
- Cancer Detection and Segmentation Project PPT CompressedDocument12 pagesCancer Detection and Segmentation Project PPT Compressedapi-636941880No ratings yet
- Engineering Science and Technology, An International JournalDocument15 pagesEngineering Science and Technology, An International JournalDevendra BairagiNo ratings yet
- Intuitionistic Fuzzy Roughness Measure For Segmentation of Brain MR ImagesDocument7 pagesIntuitionistic Fuzzy Roughness Measure For Segmentation of Brain MR ImagesSweta ParkhedkarNo ratings yet
- Improved MaskrcnnDocument13 pagesImproved MaskrcnnVainavi SamantNo ratings yet
- Super Resolucion de ImagenesDocument6 pagesSuper Resolucion de ImagenesJuan Pablo ViviescasNo ratings yet
- Ge 2021 J. Phys. Conf. Ser. 1961 012017Document7 pagesGe 2021 J. Phys. Conf. Ser. 1961 012017Rupesh KumarNo ratings yet
- 2014 - Periocular Recognition Using Unsupervised Convolutional RBM Feature Learning - CVPRDocument6 pages2014 - Periocular Recognition Using Unsupervised Convolutional RBM Feature Learning - CVPRrajesh716No ratings yet
- 1 s2.0 S0730725X19301870 MainDocument8 pages1 s2.0 S0730725X19301870 Mainzhujin1121No ratings yet
- CNN Imaging NetworksDocument13 pagesCNN Imaging NetworksnwuxvNo ratings yet
- A Novel Focal Tversky Loss Function With Improved Attention U-Net For Lesion SegmentationDocument5 pagesA Novel Focal Tversky Loss Function With Improved Attention U-Net For Lesion SegmentationMatiur Rahman MinarNo ratings yet
- Medical Image SegmentationDocument12 pagesMedical Image SegmentationMd. Ayash IslamNo ratings yet
- Comparison of Algorithms For Segmentation of Blood Vessels in Fundus ImagesDocument5 pagesComparison of Algorithms For Segmentation of Blood Vessels in Fundus Imagesyt HehkkeNo ratings yet
- CME1020 RadiologyDocument10 pagesCME1020 Radiologyeternal sunshineNo ratings yet
- 1212 0059 PDFDocument5 pages1212 0059 PDFolexNo ratings yet
- POSTER CiuttiDocument1 pagePOSTER CiuttiDai DinamarcaNo ratings yet
- FCM AlgorithmsDocument11 pagesFCM AlgorithmsEASACOLLEGENo ratings yet
- Ultimate RPDocument3 pagesUltimate RPsoniamtech2014No ratings yet
- IJETR031199Document3 pagesIJETR031199erpublicationNo ratings yet
- 2 Step Deep Learning Model For Landmarks Localization in Spine RadiographsDocument12 pages2 Step Deep Learning Model For Landmarks Localization in Spine Radiographsqiaowen wangNo ratings yet
- Novel Geometries For Stereotactic LocalizersDocument7 pagesNovel Geometries For Stereotactic LocalizersT.U. Pai João da Caridade & Caboclo FlechasNo ratings yet
- CEMB N100 Vibrometer ManualDocument52 pagesCEMB N100 Vibrometer Manuallimim56582No ratings yet
- ManualDocument272 pagesManualAkash AroraNo ratings yet
- Discussion EssayDocument25 pagesDiscussion EssayAnkur SharmaNo ratings yet
- An Analysis of "Limited and Selective Effect Theory" and "Uses and Gratification Theory" From Perspective of Mass Media ResearchDocument6 pagesAn Analysis of "Limited and Selective Effect Theory" and "Uses and Gratification Theory" From Perspective of Mass Media ResearchIAEME PublicationNo ratings yet
- Calculo Do SISDocument4 pagesCalculo Do SISAMINTA MANZANILLANo ratings yet
- DESIGN AND ANALYSIS OF HYDRAULIC POWERPACK AND PUMcalculationsDocument10 pagesDESIGN AND ANALYSIS OF HYDRAULIC POWERPACK AND PUMcalculationssubhasNo ratings yet
- How To Develop Common SenseDocument2 pagesHow To Develop Common SenseMacario Roy Jr AmoresNo ratings yet
- Signed PAN: Erwin Panofsky's (1892-1968) "The History of Art As A Humanistic Discipline" (Princeton, 1938)Document94 pagesSigned PAN: Erwin Panofsky's (1892-1968) "The History of Art As A Humanistic Discipline" (Princeton, 1938)Adrian Anton MarinNo ratings yet
- Statisticsprobability11 q4 Week2 v4Document10 pagesStatisticsprobability11 q4 Week2 v4Sheryn CredoNo ratings yet
- NotesverifDocument4 pagesNotesverifSabitri SanyalNo ratings yet
- Project Presentation On Rocker Bogie Suspension System: Babu Banarasi Das Northern India Institute of Technology, LucknowDocument21 pagesProject Presentation On Rocker Bogie Suspension System: Babu Banarasi Das Northern India Institute of Technology, LucknowAnoop SinghNo ratings yet
- What Is Validity in ResearchDocument6 pagesWhat Is Validity in ResearchRuhi KapoorNo ratings yet
- Nibrt Training 2023 FinalDocument50 pagesNibrt Training 2023 FinalAbdelrahman Ali OsmanNo ratings yet
- DSP AssignmentDocument16 pagesDSP AssignmentPunitha ShanmugamNo ratings yet
- Effect of Coffee Processing Plant Effluent On The Physicochemical Properties of Receiving Water Bodies, Jimma Zone EthiopiaDocument8 pagesEffect of Coffee Processing Plant Effluent On The Physicochemical Properties of Receiving Water Bodies, Jimma Zone EthiopiaNigist FekedeNo ratings yet
- What's Trending in Difference-In-DifferencesDocument27 pagesWhat's Trending in Difference-In-Differencesteddybear20072003No ratings yet
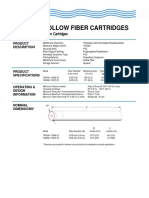
- Targa Ii Hollow Fiber Cartridges: 10-Inch Water Ultrafiltration CartridgesDocument2 pagesTarga Ii Hollow Fiber Cartridges: 10-Inch Water Ultrafiltration CartridgesChristianus RudyantoNo ratings yet
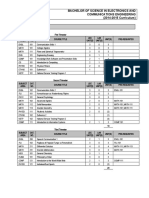
- Program Structure: Bachelor of Science in Electronics and Communications Engineering (2014-2015 Curriculum)Document5 pagesProgram Structure: Bachelor of Science in Electronics and Communications Engineering (2014-2015 Curriculum)Zainab KadhemNo ratings yet
- Music Laptop Script (WhiteHat JR Customers)Document3 pagesMusic Laptop Script (WhiteHat JR Customers)Yash JainNo ratings yet
- Customer Service-Telephone SkillsDocument18 pagesCustomer Service-Telephone SkillsRashida SimmsNo ratings yet
- A Level Physics Units & SymbolDocument3 pagesA Level Physics Units & SymbolXian Cong KoayNo ratings yet
- Maths Statistics & LR MockDocument11 pagesMaths Statistics & LR MockInnovation SkylineNo ratings yet
- Saudi Aramco Improves Field Management Practices With Intelligent SurveillanceDocument4 pagesSaudi Aramco Improves Field Management Practices With Intelligent Surveillancereza mahaseniNo ratings yet
- References PDFDocument2 pagesReferences PDFmequanintNo ratings yet
- Effects of Noise PollutionDocument2 pagesEffects of Noise PollutionMishal FatimaNo ratings yet
- EXTENSOMETRO United - Loadcells - InstrumentsDocument7 pagesEXTENSOMETRO United - Loadcells - InstrumentsAgustin PerdomoNo ratings yet
- Case Study of Master of Business AdminisDocument8 pagesCase Study of Master of Business AdminisYoke MalondaNo ratings yet
- Spelling Homework 3rd GradeDocument6 pagesSpelling Homework 3rd Gradeafnaxdxtloexll100% (1)