You might also like
- Harmonic Reduction of Three-Phase Power Inverter Injection Current Using Virtual AdmittanceDocument23 pagesHarmonic Reduction of Three-Phase Power Inverter Injection Current Using Virtual Admittanceamina bu bakerNo ratings yet
- 48 An Improved Maximum Power Point Tracking For PDFDocument10 pages48 An Improved Maximum Power Point Tracking For PDFSouhaib LoudaNo ratings yet
- 2 Synchronverter 19jan 2018Document14 pages2 Synchronverter 19jan 2018HammadAlviNo ratings yet
- Energies: An Improved Current Control Strategy For A Grid-Connected Inverter Under Distorted Grid ConditionsDocument23 pagesEnergies: An Improved Current Control Strategy For A Grid-Connected Inverter Under Distorted Grid Conditionsjuniorj123No ratings yet
- Simulation of D-Q Control System For A Unified Power Flow ControllerDocument10 pagesSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliNo ratings yet
- Mitigation of Lower Order Harmonics in A Grid-Connected Single-Phase PV InverterDocument14 pagesMitigation of Lower Order Harmonics in A Grid-Connected Single-Phase PV Invertersandeepbabu28No ratings yet
- Control Structures of Power Electronics For DPGSDocument23 pagesControl Structures of Power Electronics For DPGSAnna Maria BanicaNo ratings yet
- 32.performance Analysis - FullDocument10 pages32.performance Analysis - FullyeisongarcesNo ratings yet
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocument6 pagesControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavNo ratings yet
- 58486-Article Text-163474-1-10-20210615Document5 pages58486-Article Text-163474-1-10-20210615geremuNo ratings yet
- Multi-Step Predictive Current Control For NPC GridDocument10 pagesMulti-Step Predictive Current Control For NPC GridthinhNo ratings yet
- CorreccionFP-InVE MEM 2009 64706Document6 pagesCorreccionFP-InVE MEM 2009 64706solbahiaNo ratings yet
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterDocument8 pagesA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaNo ratings yet
- Droop Free Controls of Inverter Based GeDocument7 pagesDroop Free Controls of Inverter Based GeEsperance KAMPIRENo ratings yet
- Control of Grid Side Converter in Wind Power Based PMSG With PLL MethodDocument10 pagesControl of Grid Side Converter in Wind Power Based PMSG With PLL MethodItran AzalNo ratings yet
- Power Quality Improvement by Using Synchronous Virtual Grid Flux Oriented Control of Grid Side ConverterDocument24 pagesPower Quality Improvement by Using Synchronous Virtual Grid Flux Oriented Control of Grid Side ConverterVasanth ReddyNo ratings yet
- Icbdm 29 PDFDocument6 pagesIcbdm 29 PDFPudhur Kannan ManiNo ratings yet
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 pagesUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngNo ratings yet
- Achyut Research PaperDocument7 pagesAchyut Research PaperAchyut TadepalliNo ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDocument6 pagesA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28No ratings yet
- Implementation of Flux-Charge Control Model To Multifunctional Dynamic Voltage Restorer For Emergency Control in Distribution SystemsDocument6 pagesImplementation of Flux-Charge Control Model To Multifunctional Dynamic Voltage Restorer For Emergency Control in Distribution SystemsIJMERNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument9 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Direct Active and Reactive Power Control of Single-Phase Grid-Tie ConvertersDocument7 pagesDirect Active and Reactive Power Control of Single-Phase Grid-Tie ConvertersHalima TamboNo ratings yet
- Iosr JeeeDocument12 pagesIosr JeeekiranNo ratings yet
- Current Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyDocument6 pagesCurrent Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyijeteeditorNo ratings yet
- Power Quality Enhancement Using Grid Connected PV InverterDocument9 pagesPower Quality Enhancement Using Grid Connected PV InverterZahira Javed RNo ratings yet
- 2 Voltage Control and Power System Stability Enhancement Using UPFCDocument5 pages2 Voltage Control and Power System Stability Enhancement Using UPFCvireshmathadNo ratings yet
- Smart Grid Power Quality Improvement Using Modified UpqcDocument7 pagesSmart Grid Power Quality Improvement Using Modified UpqcKrishna ReddyNo ratings yet
- A New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input CurrentDocument7 pagesA New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input Currentmipanduro7224No ratings yet
- Sandeep 2014Document6 pagesSandeep 2014Gourab SahaNo ratings yet
- 948-955 IJER - 2016 - 1201 Mona CDocument7 pages948-955 IJER - 2016 - 1201 Mona CInnovative Research PublicationsNo ratings yet
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocument9 pagesImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedNo ratings yet
- Voltage Profile Improvement Using Static 48a88afcDocument5 pagesVoltage Profile Improvement Using Static 48a88afcharini shivNo ratings yet
- 2008 A Control Scheme For PWM Voltage-Source Distributed-Generation Inverters For Fast Load-Voltage Regulation and Effective Mitigation of Unbalanced Voltage DisturbancesDocument13 pages2008 A Control Scheme For PWM Voltage-Source Distributed-Generation Inverters For Fast Load-Voltage Regulation and Effective Mitigation of Unbalanced Voltage Disturbancesdaiduongxanh14113No ratings yet
- Ref24 PDFDocument8 pagesRef24 PDFashwiniNo ratings yet
- PLC Based Motor Power Factor ControllerDocument7 pagesPLC Based Motor Power Factor ControllerLaiba GulNo ratings yet
- Control H BridgeDocument5 pagesControl H BridgeFahad Al-shammeriNo ratings yet
- Design and Implementation of A Nonlinear PI Predictive Controller For A Grid-Tied Photovoltaic InverterDocument10 pagesDesign and Implementation of A Nonlinear PI Predictive Controller For A Grid-Tied Photovoltaic InverterAmiir AmirNo ratings yet
- 2006 Ciobotaru EPE JuDocument8 pages2006 Ciobotaru EPE Jusj.saravanan9540No ratings yet
- Figure 1: Block Diagram of Proposed SystemDocument7 pagesFigure 1: Block Diagram of Proposed SystemPrajakta dahakeNo ratings yet
- Response of Voltage Source Model of UPFC in An IEEE 5 Bus System For Power Flow EnhancementDocument5 pagesResponse of Voltage Source Model of UPFC in An IEEE 5 Bus System For Power Flow EnhancementLeonardo MiudoNo ratings yet
- IE Paper Updated PDFDocument7 pagesIE Paper Updated PDFPrajakta dahakeNo ratings yet
- VSC Smartgrid VRDocument8 pagesVSC Smartgrid VRNaji AlmusabiNo ratings yet
- Unity Power FactorDocument6 pagesUnity Power FactorReshmi Parikal RaghavanNo ratings yet
- Energies 14 02208 v3Document17 pagesEnergies 14 02208 v3Bouchaib EssoussiNo ratings yet
- 1 s2.0 S0378779622008823 MainDocument17 pages1 s2.0 S0378779622008823 MainSouhila Rached ZINENo ratings yet
- Control of An Active Rectifier With An Inductive Capacitive Inductive Filter Using A Twisting Based AlgorithmDocument6 pagesControl of An Active Rectifier With An Inductive Capacitive Inductive Filter Using A Twisting Based AlgorithmgilmartNo ratings yet
- Tahir 2016Document16 pagesTahir 2016khaledNo ratings yet
- TO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemDocument11 pagesTO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemLava KumarNo ratings yet
- A Single Phase Photovoltaic Inverter Control For Grid Connected SystemDocument16 pagesA Single Phase Photovoltaic Inverter Control For Grid Connected SystemRAMPRASATH EEENo ratings yet
- International Journal of Engineering and Science Invention (IJESI)Document10 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsNo ratings yet
- Investigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationDocument6 pagesInvestigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationAmran MaulanaNo ratings yet
- V5N2 043Document6 pagesV5N2 043Alif Mu'tashimNo ratings yet
- Dynamic Voltage Stability Enhancement of A Grid-Connected Wind Power System by ANFIS Controlled Static Var CompensatorDocument4 pagesDynamic Voltage Stability Enhancement of A Grid-Connected Wind Power System by ANFIS Controlled Static Var CompensatorEngr GM SialNo ratings yet
- Artikel Pertemuan 1Document12 pagesArtikel Pertemuan 1Gagan HariyantoNo ratings yet
- IgbtDocument7 pagesIgbtelvergonzalez1No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- GT Series SectionDocument46 pagesGT Series SectionCRelectronicNo ratings yet
- Intelligent Power Distribution Cabinet TPD48202B-N20C6 DatasheetDocument1 pageIntelligent Power Distribution Cabinet TPD48202B-N20C6 DatasheetalfredoculajayNo ratings yet
- Ict114 Lecture 2Document7 pagesIct114 Lecture 2Shirley LohNo ratings yet
- EC8661 VLSI Design Lab ManualDocument76 pagesEC8661 VLSI Design Lab ManualN.S.Priyanga 33100% (3)
- Catalogo NILOX SPORT - 2014 PDFDocument26 pagesCatalogo NILOX SPORT - 2014 PDFmanryNo ratings yet
- BQDocument86 pagesBQpawelmmNo ratings yet
- Tas 5142Document34 pagesTas 5142Dragan SurlanNo ratings yet
- FC-30 Tuner YaesuDocument2 pagesFC-30 Tuner Yaesuolds_coolNo ratings yet
- 2014 - Channel Estimation and Equalization For 5G Wireless Communication Systems (UFMC)Document81 pages2014 - Channel Estimation and Equalization For 5G Wireless Communication Systems (UFMC)Alexandre FerreiraNo ratings yet
- Industrial Training: Presented By: Padmaja PandeDocument13 pagesIndustrial Training: Presented By: Padmaja PandePadmaja PandeNo ratings yet
- NOTES (2023-2024) Subject: PHYSICS Class: XII Experiment No.1: Ohm'S LawDocument5 pagesNOTES (2023-2024) Subject: PHYSICS Class: XII Experiment No.1: Ohm'S LawMichael IbrahimNo ratings yet
- ONAN VR21 Volt. Reg. Op. and TroubleshootingDocument4 pagesONAN VR21 Volt. Reg. Op. and TroubleshootingAbood Ali100% (1)
- Thermistor-Based Respiration MonitorDocument12 pagesThermistor-Based Respiration Monitorapip055No ratings yet
- EL5101 - Incremental Encoder Interface: Position Measurement Position Measurement Position MeasurementDocument2 pagesEL5101 - Incremental Encoder Interface: Position Measurement Position Measurement Position MeasurementGenivaldo Luiz de CarvalhoNo ratings yet
- Inno3D Geforce RTX 2080 Super Ichill BlackDocument1 pageInno3D Geforce RTX 2080 Super Ichill BlackRintu PatarNo ratings yet
- Premium Serial CommunicationDocument12 pagesPremium Serial CommunicationLe Thanh ToanNo ratings yet
- Chapter 24 Test Computer Security4e - Wireless Network SecurityDocument5 pagesChapter 24 Test Computer Security4e - Wireless Network SecurityArisya Nurqamarina100% (1)
- 1st Quarter I.C.T 10 ReviewerDocument13 pages1st Quarter I.C.T 10 ReviewerLinsay Alaine Yap100% (1)
- 21-6 - Cables and Small Wiring (QCS 2014)Document1 page21-6 - Cables and Small Wiring (QCS 2014)gurubai123No ratings yet
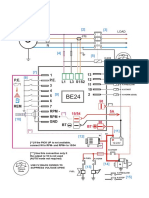
- Diesel Generator Control Panel Wiring Diagram Be24Document1 pageDiesel Generator Control Panel Wiring Diagram Be24NabilBouabana100% (3)
- P340 Opman Eng - 06Document91 pagesP340 Opman Eng - 06Matias Contreras KöbrichNo ratings yet
- Marconi OMS846 R1.1Document36 pagesMarconi OMS846 R1.1Jonatan Soares100% (1)
- Brocade 1Document76 pagesBrocade 1yugi17100% (1)
- Panasonic S10 Plasma TVDocument72 pagesPanasonic S10 Plasma TVplanet_ocho7472No ratings yet
- 100% Stator Earth Fault Protection of Generator - Electrical4uDocument2 pages100% Stator Earth Fault Protection of Generator - Electrical4uTLD 4 PSNo ratings yet
- Chapter 1 PDFDocument127 pagesChapter 1 PDFAhmed Al-MasoodiNo ratings yet
- Lynx LX v8Document5 pagesLynx LX v8Bambang KaryantoNo ratings yet
- Electropneumatic COURSEDocument17 pagesElectropneumatic COURSEJeffery YipNo ratings yet
- Omron EE SX674 DatasheetDocument13 pagesOmron EE SX674 DatasheetYoussef MessaoudiNo ratings yet
- CBDT3103 Intro To Distributed System PDFDocument207 pagesCBDT3103 Intro To Distributed System PDFBombo RastaNo ratings yet