You might also like
- Buster Hernandez Aka Brian KilDocument38 pagesBuster Hernandez Aka Brian KilKyle BloydNo ratings yet
- Full Download Enterprise Systems For Management 2nd Edition Motiwalla Solutions ManualDocument20 pagesFull Download Enterprise Systems For Management 2nd Edition Motiwalla Solutions Manualstun.lisnejbko8h100% (40)
- Cloud MigrationDocument12 pagesCloud MigrationPrashant PanseNo ratings yet
- Saran Bhuma SAP MM WMDocument9 pagesSaran Bhuma SAP MM WMRamana ReddyNo ratings yet
- MouseSensor MCS 12086 DatasheetDocument7 pagesMouseSensor MCS 12086 Datasheetpourya amiriNo ratings yet
- YDLIDAR X2 DatasheetDocument8 pagesYDLIDAR X2 DatasheetVale ITreNo ratings yet
- Am Superheterodyne Receiver: ApplicationsDocument4 pagesAm Superheterodyne Receiver: ApplicationscaptainNo ratings yet
- Product Data Sheet: Micrologic 5.0 X Control UnitDocument4 pagesProduct Data Sheet: Micrologic 5.0 X Control UnitTosikur RahmanNo ratings yet
- 2.4GHz nRF24L01+FCC Certificated 2.4GHz Wireless Transceiver Module RF2401Pro V1.2Document5 pages2.4GHz nRF24L01+FCC Certificated 2.4GHz Wireless Transceiver Module RF2401Pro V1.2Anonymous HPlNDhM6ejNo ratings yet
- Micrologic 6.0 X Control Unit Spec SheetDocument4 pagesMicrologic 6.0 X Control Unit Spec SheetAhmed AbozahrahNo ratings yet
- E19-433M30S User Manual: Sx1278 433Mhz 1W SMD Wireless ModuleDocument12 pagesE19-433M30S User Manual: Sx1278 433Mhz 1W SMD Wireless ModuleMert Eren KarabulutNo ratings yet
- AVV-701 Pro Laser Alignment (Brochure)Document2 pagesAVV-701 Pro Laser Alignment (Brochure)Ahmed El-ShafeiNo ratings yet
- Sa818 PDFDocument8 pagesSa818 PDFDARU WIRANTONo ratings yet
- Barcode SR-750 - DatasheetDocument3 pagesBarcode SR-750 - DatasheetSudhin KNo ratings yet
- IOT Sensor Acquisition System Gateway IOT-G010 V1.0Document8 pagesIOT Sensor Acquisition System Gateway IOT-G010 V1.0Ricardo Villalobos RojasNo ratings yet
- SK200-1W Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Document10 pagesSK200-1W Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Вадим МкртчянNo ratings yet
- WT1500 Series External Modulation Optical TransmitterDocument3 pagesWT1500 Series External Modulation Optical TransmitterDaniel TacoNo ratings yet
- STR6 485 Manual enDocument24 pagesSTR6 485 Manual enIgor YoshikawaNo ratings yet
- Product Data Sheet 6314/2TDHPDocument11 pagesProduct Data Sheet 6314/2TDHPxavier morenoNo ratings yet
- CM-MPN.72S: CM-MPN.72S Three-Phase Monitoring Relay 2c/o, 0,0.1-30s, L1-L2-L3 3x530-820VACDocument4 pagesCM-MPN.72S: CM-MPN.72S Three-Phase Monitoring Relay 2c/o, 0,0.1-30s, L1-L2-L3 3x530-820VACSSE ACCNo ratings yet
- SA818 1W Embedded Walkie Talkie Modulev3.4Document8 pagesSA818 1W Embedded Walkie Talkie Modulev3.4Kevin ChapmanNo ratings yet
- YDLIDAR X4 Data Sheet V1.1 (211230)Document8 pagesYDLIDAR X4 Data Sheet V1.1 (211230)Hermanto ChuaNo ratings yet
- Smartax Ma5671A: Multi-Service Access ModuleDocument8 pagesSmartax Ma5671A: Multi-Service Access Moduletang alexNo ratings yet
- CMMP-AS-C5-11A-P3-M0 Motor Controller Data SheetDocument2 pagesCMMP-AS-C5-11A-P3-M0 Motor Controller Data SheetRupesh IrkarNo ratings yet
- Data Sheet Cp24mht80 enDocument2 pagesData Sheet Cp24mht80 enJoseph StephensNo ratings yet
- Project Documentation - Sensorflex 30G Data SheetDocument15 pagesProject Documentation - Sensorflex 30G Data SheetOmar HectorNo ratings yet
- UWB TAG Datasheet Features High Precision Ranging 5cmDocument4 pagesUWB TAG Datasheet Features High Precision Ranging 5cmNhàn Nguyễn ThanhNo ratings yet
- 3.5 Inch NX4832K035-EnhancedDocument4 pages3.5 Inch NX4832K035-EnhancedAsifNo ratings yet
- MasterPact MTZ - LV847608Document4 pagesMasterPact MTZ - LV847608leelsNo ratings yet
- SK200-100mw Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Document10 pagesSK200-100mw Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Luís RolaNo ratings yet
- YDLIDAR X2 Data Sheet V2.0Document9 pagesYDLIDAR X2 Data Sheet V2.0Prospeccion GeofisicaNo ratings yet
- Measuring Instrument - EEM-MA770 - 2907945: Key Commercial DataDocument4 pagesMeasuring Instrument - EEM-MA770 - 2907945: Key Commercial DataSỹ TháiNo ratings yet
- NP2000PRDocument3 pagesNP2000PRDaniel Herrera AstudilloNo ratings yet
- LIDAR Lite Laser DatasheetDocument2 pagesLIDAR Lite Laser DatasheetCruz Manuel PerezNo ratings yet
- ST4 Baseresource 24094223499Document96 pagesST4 Baseresource 24094223499AyMën TØûßænëNo ratings yet
- Baumer OF10.FR-PW1B.B2CV EN 20210127 DSDocument2 pagesBaumer OF10.FR-PW1B.B2CV EN 20210127 DSErnesto AlemanNo ratings yet
- SA868 2W Embedded Walkie Talkie ModuleV1.2Document16 pagesSA868 2W Embedded Walkie Talkie ModuleV1.2Chakphanu KomasathitNo ratings yet
- RF4463F30 1W High Power Wireless Transceiver Module V2.2Document9 pagesRF4463F30 1W High Power Wireless Transceiver Module V2.2marcusNo ratings yet
- E01C-Ml01S User Manual: Si24R1 2.4Ghz Spi SMD Wireless ModuleDocument9 pagesE01C-Ml01S User Manual: Si24R1 2.4Ghz Spi SMD Wireless Modulegipsyking2010No ratings yet
- Buffer Module - QUINT4-BUFFER/24DC/40 - 2908283: Key Commercial DataDocument5 pagesBuffer Module - QUINT4-BUFFER/24DC/40 - 2908283: Key Commercial DataAlicia AltamiranoNo ratings yet
- 智能电力监测仪表 Advanced Power Meter: User's ManualDocument73 pages智能电力监测仪表 Advanced Power Meter: User's ManualAri NursahNo ratings yet
- Ion9000 Metseion92040Document4 pagesIon9000 Metseion92040khernandezNo ratings yet
- Eng Ds Md-220 Ota A1Document4 pagesEng Ds Md-220 Ota A1ZorbanfrNo ratings yet
- Praktek Mekatronika Klasifikasi Sensor Dan Tranduser: Dosen: Drs. Ta'ali Oleh: Muhammad Rahman 17130056Document6 pagesPraktek Mekatronika Klasifikasi Sensor Dan Tranduser: Dosen: Drs. Ta'ali Oleh: Muhammad Rahman 17130056Muhammad RahmanNo ratings yet
- 1136 E01-ML01DP5 Usermanual EN V1.2Document11 pages1136 E01-ML01DP5 Usermanual EN V1.2HectorNo ratings yet
- Rfso S A0010099186 1-2576209Document4 pagesRfso S A0010099186 1-2576209lumisoftNo ratings yet
- QM55003 Data SheetDocument25 pagesQM55003 Data SheetlolNo ratings yet
- Nextion Hmi TFT 3 2 Inch LCD Intelligent DisplayDocument5 pagesNextion Hmi TFT 3 2 Inch LCD Intelligent DisplayPradeep Kumar SNo ratings yet
- Z4LC Parallel Beam Line Sensor ReviewDocument17 pagesZ4LC Parallel Beam Line Sensor ReviewDjoNo ratings yet
- E73-2G4M04S1B Usermanual EN v1.5Document13 pagesE73-2G4M04S1B Usermanual EN v1.5AmirHossin IzadiNo ratings yet
- Bird Senors Test Measurement CatalogDocument84 pagesBird Senors Test Measurement CatalogrustyNo ratings yet
- LTMR100MFMDocument5 pagesLTMR100MFMAndrea B.No ratings yet
- DM542T PDFDocument12 pagesDM542T PDFyaidelNo ratings yet
- CS260B Datasheet 121020Document6 pagesCS260B Datasheet 121020cikaracakNo ratings yet
- CT 4008Tn 5V50mA 164 U SpecDocument3 pagesCT 4008Tn 5V50mA 164 U Specmohsen akbariNo ratings yet
- DE-LiDAR TFmini Datasheet-V1.7-EN PDFDocument10 pagesDE-LiDAR TFmini Datasheet-V1.7-EN PDFDarell Timothy TariganNo ratings yet
- Electromagnetic Flow Converter SplitDocument31 pagesElectromagnetic Flow Converter Splitraharja.wahyu.agus.kadekNo ratings yet
- SA858 Datasheet V1.5Document16 pagesSA858 Datasheet V1.5Himanshu SanadhyaNo ratings yet
- 532nm 6W Fiber Coupled Module QPC Laser OperationsDocument2 pages532nm 6W Fiber Coupled Module QPC Laser OperationsIvanNo ratings yet
- Optical Speed and Length Sensors ISD-3 Series Eng PDFDocument18 pagesOptical Speed and Length Sensors ISD-3 Series Eng PDFMohsin LatifNo ratings yet
- TM1000 1Document2 pagesTM1000 1John SmithNo ratings yet
- So-Qsfp28-Pam4-Dxxxx: Qsfp28, 100gbase, Pam4, DWDM, SM, DDM, 80Km, LCDocument7 pagesSo-Qsfp28-Pam4-Dxxxx: Qsfp28, 100gbase, Pam4, DWDM, SM, DDM, 80Km, LCBui TheQuanNo ratings yet
- Source Code Esp32 DC MotorDocument2 pagesSource Code Esp32 DC Motorzero okNo ratings yet
- Jawaban Essay RL3Document4 pagesJawaban Essay RL3zero okNo ratings yet
- JK FF CounterDocument1 pageJK FF Counterzero okNo ratings yet
- JK FF Counter Up Dan DownDocument2 pagesJK FF Counter Up Dan Downzero okNo ratings yet
- Latihan RL1Document3 pagesLatihan RL1zero okNo ratings yet
- Source Code VB ElevatorDocument8 pagesSource Code VB Elevatorzero okNo ratings yet
- Lat Quine Mccluskey 2-3 VarDocument1 pageLat Quine Mccluskey 2-3 Varzero okNo ratings yet
- RL 1Document20 pagesRL 1zero okNo ratings yet
- Tugas Jarkom 18 Maret 2014 Subnetting - ShareDocument2 pagesTugas Jarkom 18 Maret 2014 Subnetting - Sharezero okNo ratings yet
- RL 2Document2 pagesRL 2zero okNo ratings yet
- Pertemuan Ke - 04 NewDocument24 pagesPertemuan Ke - 04 Newzero okNo ratings yet
- Fa164 SeriesDocument24 pagesFa164 SeriesyanetNo ratings yet
- Automation Attendance Systems Approaches: A Practical ReviewDocument9 pagesAutomation Attendance Systems Approaches: A Practical ReviewBOHR International Journal of Internet of Things ResearchNo ratings yet
- Computer Science Competence Based Syllabus Final Printing VersionDocument130 pagesComputer Science Competence Based Syllabus Final Printing Versionapi-323248884100% (1)
- INTERMEC EasyCoder PC4 Parts ListDocument30 pagesINTERMEC EasyCoder PC4 Parts ListC LNo ratings yet
- Amateur Radio Internet GatewayDocument176 pagesAmateur Radio Internet GatewayLuna García PadrónNo ratings yet
- Clock Domain Crossing (CDC) : Erik Seligman CS 510, Lecture 17, March 2009Document39 pagesClock Domain Crossing (CDC) : Erik Seligman CS 510, Lecture 17, March 2009Rohan PeterNo ratings yet
- Analyze Your Scratch Projects With Dr. Scratch and Assess Your Computational Thinking SkillsDocument34 pagesAnalyze Your Scratch Projects With Dr. Scratch and Assess Your Computational Thinking Skillsfaizah rozaliNo ratings yet
- Inventory Optimization SETUPDocument16 pagesInventory Optimization SETUPAvinash RoutrayNo ratings yet
- Electronis Formula Book (ErForum)Document82 pagesElectronis Formula Book (ErForum)Sauvik ChakrabortyNo ratings yet
- Agricultural Management SystemDocument8 pagesAgricultural Management SystemMaster TNo ratings yet
- CV English TeacherDocument3 pagesCV English TeacherAraf Ahmed SayemNo ratings yet
- RUTAGDocument3 pagesRUTAGRidwan AhmedNo ratings yet
- Ge Stamford Hc444c1Document8 pagesGe Stamford Hc444c1Octavio EdgardoNo ratings yet
- Voip Ceiling SpeakerDocument42 pagesVoip Ceiling SpeakerMaría dieciochoNo ratings yet
- Ar-One: Monitor Any Frequency From 10 KHZ To 3.3 GHZDocument2 pagesAr-One: Monitor Any Frequency From 10 KHZ To 3.3 GHZaliaj2No ratings yet
- BMA 3622-MCG-01-0101-enDocument3 pagesBMA 3622-MCG-01-0101-enjujonetNo ratings yet
- Sorry There I Haven't Added Pictures Yet, Read It Temporarily, I Will Add It SoonDocument5 pagesSorry There I Haven't Added Pictures Yet, Read It Temporarily, I Will Add It SoonPHƯƠNG NHI ĐỖ LÊNo ratings yet
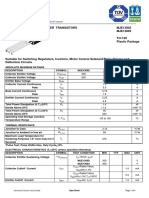
- NPN Epitaxial Silicon Power Transistors MJE13002 MJE13003 TO-126 Plastic PackageDocument4 pagesNPN Epitaxial Silicon Power Transistors MJE13002 MJE13003 TO-126 Plastic PackageJavier Mendoza CastroNo ratings yet
- IPMI Firmware / BIOS Release Notes FormDocument3 pagesIPMI Firmware / BIOS Release Notes FormAndrea KuznetsovaNo ratings yet
- Incremental ModelDocument8 pagesIncremental ModelmonishaNo ratings yet
- Convoy-Truck Prking ModuleDocument4 pagesConvoy-Truck Prking ModuleTalha AslamNo ratings yet
- Block Diagram: X541UV Repair GuideDocument7 pagesBlock Diagram: X541UV Repair GuideIlham PanjiNo ratings yet
- Project Report MiniDocument27 pagesProject Report Minisumit gandhi86% (21)
- Certificate Declaration Index and AcknowledgementDocument5 pagesCertificate Declaration Index and AcknowledgementNidhi ShahNo ratings yet
- Continuity/Insulation Resistance Test FormDocument1 pageContinuity/Insulation Resistance Test FormVictor BiacoloNo ratings yet
- Aurora Borealis Newsletter PresentationDocument19 pagesAurora Borealis Newsletter Presentationthu2uje065yip34lpckNo ratings yet