You might also like
- Pid Controller Without NoiseDocument10 pagesPid Controller Without NoisessleandroNo ratings yet
- 09 PID Control + CompensatorsDocument32 pages09 PID Control + Compensatorsomar hanyNo ratings yet
- Controller 5Document39 pagesController 5DSYMEC224Trupti BagalNo ratings yet
- Proportional-Integral-Derivative Control: ObjectivesDocument5 pagesProportional-Integral-Derivative Control: ObjectivesQuenneBelocuraNo ratings yet
- 英文PID资料Document3 pages英文PID资料Richard LeeNo ratings yet
- Chapter 1.5Document8 pagesChapter 1.5Anonymous en5etXfNo ratings yet
- App PIDDocument12 pagesApp PIDP Praveen KumarNo ratings yet
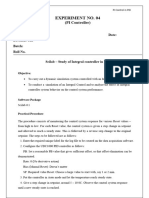
- Experiment No. 03: (P Controller)Document8 pagesExperiment No. 03: (P Controller)KADUSKAR PALASHNo ratings yet
- Amd Pid ControlDocument12 pagesAmd Pid ControlpfalencarNo ratings yet
- Study On Control of PID and Motor: Let's StartDocument18 pagesStudy On Control of PID and Motor: Let's Startraadhassan02No ratings yet
- 5 PidDocument7 pages5 PidKADUSKAR PALASHNo ratings yet
- 5 - PID IAPC - MergedDocument20 pages5 - PID IAPC - MergedNikita ChaudhariNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- Introduction To PID Controller With Detailed P, PI, PD & PD Control - VivekBose - Com (1) Very Good ThingDocument19 pagesIntroduction To PID Controller With Detailed P, PI, PD & PD Control - VivekBose - Com (1) Very Good Thingahsan.shah7542No ratings yet
- By Group 5: Sintu Kumar Sharma 0017 Avishek Mukherjee 0018 MD Ashraf Alam Khan 0019 Dali Das 0020Document13 pagesBy Group 5: Sintu Kumar Sharma 0017 Avishek Mukherjee 0018 MD Ashraf Alam Khan 0019 Dali Das 0020Sunil SinghNo ratings yet
- PIDtutorialDocument13 pagesPIDtutorialalijnubyNo ratings yet
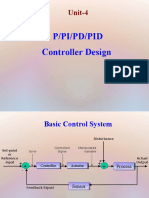
- P/Pi/Pd/Pid Controller Design: Unit-4Document39 pagesP/Pi/Pd/Pid Controller Design: Unit-4harish9No ratings yet
- The Dark Side of LoopDocument143 pagesThe Dark Side of Loopsongzheng chenNo ratings yet
- Utm Sour6Document3 pagesUtm Sour6JamalAhmedNo ratings yet
- Lab 12 Position Control SystemDocument8 pagesLab 12 Position Control SystemCat HowardNo ratings yet
- Experiment-5: Roll No. - 1709721094Document3 pagesExperiment-5: Roll No. - 1709721094shardendu dwivediNo ratings yet
- 4 PiDocument7 pages4 PiKADUSKAR PALASHNo ratings yet
- Controlsystem 5Document8 pagesControlsystem 5sabarivelan sNo ratings yet
- PID Robust Control Using Taguchi MethodDocument6 pagesPID Robust Control Using Taguchi MethodIsra Lemus SanchezNo ratings yet
- Pid Tuning MethodsDocument16 pagesPid Tuning MethodsNirmal sachanNo ratings yet
- Performance of P-Only, PI and PID ControllersDocument21 pagesPerformance of P-Only, PI and PID ControllersRahulMunthaNo ratings yet
- Performance of P-Only, PI and PID ControllersDocument21 pagesPerformance of P-Only, PI and PID ControllersarunNo ratings yet
- PIDDocument32 pagesPIDHani Hasan100% (1)
- Pid PDFDocument22 pagesPid PDFmansoorNo ratings yet
- 4 - Pi IapcDocument7 pages4 - Pi IapcNikita ChaudhariNo ratings yet
- 1.4. Lean Six Sigma AbbreviationsDocument6 pages1.4. Lean Six Sigma AbbreviationsEric DesportesNo ratings yet
- Control Systems Lect. 4 PIDDocument65 pagesControl Systems Lect. 4 PIDhmaymadNo ratings yet
- FA17-EEE-037 Control Lab Report 11Document6 pagesFA17-EEE-037 Control Lab Report 11Hammad SattiNo ratings yet
- PID ControlDocument32 pagesPID ControlSyamil RahmanNo ratings yet
- PROGRAMMING EXERCISE 03 Zarelle and CheloDocument4 pagesPROGRAMMING EXERCISE 03 Zarelle and CheloJeremiah PuaNo ratings yet
- Effects of A PID Controller in Closed Loop Feedback SystemDocument4 pagesEffects of A PID Controller in Closed Loop Feedback Systemali.azim1380No ratings yet
- Control Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignDocument17 pagesControl Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignPrashant ChinamalliNo ratings yet
- PidDocument18 pagesPidByron Xavier Lima CedilloNo ratings yet
- The Guide To PID TuningDocument29 pagesThe Guide To PID TuningIvan OxfordNo ratings yet
- Module 10 - Loop TuningDocument41 pagesModule 10 - Loop TuningHtet LwinNo ratings yet
- Chapter 4 - PID ControllerDocument62 pagesChapter 4 - PID ControllerHuy Nguyen LuongNo ratings yet
- PID ControllerDocument5 pagesPID ControllerAbhilash MallikarjunaNo ratings yet
- PidDocument10 pagesPidarundh93No ratings yet
- Control SystenDocument87 pagesControl SystenKpsingh KalsiNo ratings yet
- PI Controller in The Simulink Model Using MATLABDocument9 pagesPI Controller in The Simulink Model Using MATLABMatlabAsignmentExpertsNo ratings yet
- Business Environment Changes in The Past Twenty YearsDocument8 pagesBusiness Environment Changes in The Past Twenty YearsLowFunctioningSociopathNo ratings yet
- Routh-Hurwitz Stability CriterionDocument37 pagesRouth-Hurwitz Stability CriterionNagajyothiVirivintiNo ratings yet
- Pi Tops DemoDocument54 pagesPi Tops DemoAndres JimenezNo ratings yet
- Traditional PID Control Method: Fundamental of Instruments and Process Course Name: Myo Zaw Oo Student ID: 3122999029Document11 pagesTraditional PID Control Method: Fundamental of Instruments and Process Course Name: Myo Zaw Oo Student ID: 3122999029Myo Zaw OoNo ratings yet
- 05 Introduction PID Controller DesignDocument22 pages05 Introduction PID Controller DesignAhtisham195No ratings yet
- 1.1 Proportional Control Mode (P) : V OimendustegurDocument1 page1.1 Proportional Control Mode (P) : V OimendustegurmsNo ratings yet
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesNo ratings yet
- KrishiDocument3 pagesKrishiKrishi ChhedaNo ratings yet
- Breakthrough IT: Supercharging Organizational Value Through TechnologyFrom EverandBreakthrough IT: Supercharging Organizational Value Through TechnologyNo ratings yet