You might also like
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- Sustainability 11 04539 v2Document20 pagesSustainability 11 04539 v2Lou OgayonNo ratings yet
- Reilly's Law of Retail GravitationDocument7 pagesReilly's Law of Retail GravitationAmal Datta100% (3)
- Interactive Control of Large Crowd Navigation in Virtual Environment Using Vector FieldDocument7 pagesInteractive Control of Large Crowd Navigation in Virtual Environment Using Vector Fieldlb0000No ratings yet
- Pedestrian Flows in Multi-Level Commercial SpacesDocument15 pagesPedestrian Flows in Multi-Level Commercial SpacesSumit yadavNo ratings yet
- Counting People With Low-Level Features and Bayesian RegressionDocument14 pagesCounting People With Low-Level Features and Bayesian Regressionasma2497No ratings yet
- Optimizing New Chain Retail Store Area by Using Voronoi Diagram TechniqueDocument10 pagesOptimizing New Chain Retail Store Area by Using Voronoi Diagram TechniqueCarlos Mera RamírezNo ratings yet
- Integrating Urban Knowledge for Pedestrian Behavior AnalysisDocument9 pagesIntegrating Urban Knowledge for Pedestrian Behavior AnalysisognenmarinaNo ratings yet
- 4 Spatial Interaction ShoppingDocument21 pages4 Spatial Interaction ShoppingGiang Văn TrọngNo ratings yet
- Hong Kong 1998Document10 pagesHong Kong 1998lcirnu123No ratings yet
- Critical Review Location and Spatial Analysis The Use of Gravity Model in Spatial PlanningDocument10 pagesCritical Review Location and Spatial Analysis The Use of Gravity Model in Spatial PlanningSir AlexNo ratings yet
- Real-Time People Counting System For Customer Movement AnalysisDocument9 pagesReal-Time People Counting System For Customer Movement AnalysisShreyasi PatilNo ratings yet
- Huff Model (Ruang Dan Sistem Perekonomian)Document16 pagesHuff Model (Ruang Dan Sistem Perekonomian)RinaNo ratings yet
- Visual Analytics Tools For Analysis of Movement Data: Gennady Andrienko1 Natalia Andrienko1 Stefan Wrobel1,2 1Document18 pagesVisual Analytics Tools For Analysis of Movement Data: Gennady Andrienko1 Natalia Andrienko1 Stefan Wrobel1,2 1rahuldeosinNo ratings yet
- Literature Review On Traffic FlowDocument6 pagesLiterature Review On Traffic Flowgpnovecnd100% (1)
- Pedestrian Detection in Crowded Scenes: (Leibe, Edgar - Seemann, Schiele) @informatik - Tu-Darmstadt - deDocument8 pagesPedestrian Detection in Crowded Scenes: (Leibe, Edgar - Seemann, Schiele) @informatik - Tu-Darmstadt - deTanvirul Alam AshruNo ratings yet
- Centrality and Land Use: Three Case Studies On The Configurational HypothesisDocument21 pagesCentrality and Land Use: Three Case Studies On The Configurational HypothesisvladimirNo ratings yet
- Pedestrian Management Strategies For Improving Flow Dynamics in Transportation Hubs REVISEDocument22 pagesPedestrian Management Strategies For Improving Flow Dynamics in Transportation Hubs REVISEZaid Mohammad AlRababahNo ratings yet
- Research Article: Parallel Motion Simulation of Large-Scale Real-Time Crowd in A Hierarchical Environmental ModelDocument16 pagesResearch Article: Parallel Motion Simulation of Large-Scale Real-Time Crowd in A Hierarchical Environmental ModelLars SepeNo ratings yet
- Human Mobility Semantics Analysis: A Probabilistic and Scalable ApproachDocument34 pagesHuman Mobility Semantics Analysis: A Probabilistic and Scalable ApproachLolo AbdNo ratings yet
- Exploratory Space Data Analysis of SpatialDocument16 pagesExploratory Space Data Analysis of SpatialArch K3NNo ratings yet
- Routinemap Patterns of Life in Spatiotemporal VisualizationDocument10 pagesRoutinemap Patterns of Life in Spatiotemporal Visualizationapi-305338429No ratings yet
- A Generative Model For 3D Urban Scene Understanding From Movable PlatformsDocument8 pagesA Generative Model For 3D Urban Scene Understanding From Movable PlatformsIon TomitaNo ratings yet
- Spatial Data Mining in Geo-BusinessDocument36 pagesSpatial Data Mining in Geo-BusinessLuis Carlos PaniaguaNo ratings yet
- Project Title - Crowd Counting System Using Switch Convolution Neural Network-1Document6 pagesProject Title - Crowd Counting System Using Switch Convolution Neural Network-1Manish KNo ratings yet
- Summary For Research PaperDocument3 pagesSummary For Research PaperAllu Shashidhar ReddyNo ratings yet
- Chapter 1 IntroductionDocument28 pagesChapter 1 Introductionppjadhav920No ratings yet
- Spatial Movement Pattern Analysis in Seoul Public TransportationDocument2 pagesSpatial Movement Pattern Analysis in Seoul Public TransportationSivaprasad SaravananNo ratings yet
- Activity Ijgis 2001Document25 pagesActivity Ijgis 2001OsvaldoDanielCardozoNo ratings yet
- 01.13.hierarchical Model-Based Motion EstimationDocument16 pages01.13.hierarchical Model-Based Motion EstimationAlessioNo ratings yet
- Assessing The Influence of Spatio-Temporal Context For Next Place Prediction Using Different Machine Learning ApproachesDocument24 pagesAssessing The Influence of Spatio-Temporal Context For Next Place Prediction Using Different Machine Learning ApproachesΓιάννης ΜανουσαρίδηςNo ratings yet
- 2 Mid Semester Exam PaperDocument13 pages2 Mid Semester Exam PaperMadhu TanniruNo ratings yet
- How Original Huff Model WorksDocument3 pagesHow Original Huff Model WorksSiddharth BajpaiNo ratings yet
- Analyze Spatial Data and ModelsDocument26 pagesAnalyze Spatial Data and ModelsXaynoy VilaxayNo ratings yet
- The Journal of Space Syntax The Journal of Space Syntax The Journal of Space Syntax The Journal of Space Syntax The Journal of Space SyntaxDocument16 pagesThe Journal of Space Syntax The Journal of Space Syntax The Journal of Space Syntax The Journal of Space Syntax The Journal of Space Syntaxisrar999No ratings yet
- Activity Modeling and Recognition Using Shape Theory: Rama Chellappa, Namrata Vaswani, Amit K.Roy ChowdhuryDocument4 pagesActivity Modeling and Recognition Using Shape Theory: Rama Chellappa, Namrata Vaswani, Amit K.Roy ChowdhuryChanukya Krishna ChamaNo ratings yet
- Urban Mobility Analysis With Mobile Network DataDocument10 pagesUrban Mobility Analysis With Mobile Network DataWilliam LindgreenNo ratings yet
- Modelling Pedestrian Behaviour in Shopping AreasDocument15 pagesModelling Pedestrian Behaviour in Shopping AreasFrialynNo ratings yet
- Behaviours in A Dynamical Model of TrafficDocument7 pagesBehaviours in A Dynamical Model of TrafficmshahabiNo ratings yet
- Bilginotu INSPIREDocument10 pagesBilginotu INSPIREkalkinmaNo ratings yet
- HOG Human Detection <40Document8 pagesHOG Human Detection <40Ramsha BukhariNo ratings yet
- 2017 Demare Et Ali Modeling Logistic Systems With An Agent-Based Model and Dynamic GraphsDocument16 pages2017 Demare Et Ali Modeling Logistic Systems With An Agent-Based Model and Dynamic GraphsShivasanggari RamasamyNo ratings yet
- 3 RouteAndLocationChoice SpecialDocument10 pages3 RouteAndLocationChoice SpecialjessicaNo ratings yet
- KRAFTA - 1996 - Urban Convergence Morphology Attraction - EnvBDocument12 pagesKRAFTA - 1996 - Urban Convergence Morphology Attraction - EnvBLucas Dorneles MagnusNo ratings yet
- Journal of Retailing and Consumer Services: Soora Rasouli, Harry TimmermansDocument8 pagesJournal of Retailing and Consumer Services: Soora Rasouli, Harry TimmermansParth PasheklNo ratings yet
- Working Papers Series: Paper 109 - Sep 06Document10 pagesWorking Papers Series: Paper 109 - Sep 06Mark J. Burton IINo ratings yet
- Spatial Models in Marketing: University of PennsylvaniaDocument12 pagesSpatial Models in Marketing: University of Pennsylvaniaarmendra04No ratings yet
- Travel Demand Forecasting Models ExplainedDocument14 pagesTravel Demand Forecasting Models Explainedpilipinas19No ratings yet
- Allo Metric CitiesDocument24 pagesAllo Metric CitiesAnonymous txyvmbYNo ratings yet
- Data Visualisation: Why Is Data Visualization Important?Document19 pagesData Visualisation: Why Is Data Visualization Important?Ankit SrivastavaNo ratings yet
- Gravity Model-Lecture NotesDocument4 pagesGravity Model-Lecture NotesTimon InnocentNo ratings yet
- Autonomous Pedestrians: Wei Shao, Demetri TerzopoulosDocument29 pagesAutonomous Pedestrians: Wei Shao, Demetri TerzopoulosKhairulNo ratings yet
- Smart City Data Stream Visualization Using Glyphs: NtroductionDocument5 pagesSmart City Data Stream Visualization Using Glyphs: Ntroductionmaks1702No ratings yet
- Animated Transitions in Statistical Data Graphics: Jeffrey Heer, George G. RobertsonDocument8 pagesAnimated Transitions in Statistical Data Graphics: Jeffrey Heer, George G. RobertsonmdhansenNo ratings yet
- Visualizing The Invisible Image of CitiesDocument8 pagesVisualizing The Invisible Image of CitiesFernando BordignonNo ratings yet
- Logistical Inventory Approach in Forecasting and Relocating Share-Use VehiclesDocument5 pagesLogistical Inventory Approach in Forecasting and Relocating Share-Use VehiclesVrushabh SahareNo ratings yet
- A New Approach To Cooperative Pathfinding (Short Paper) : Renee Jansen Nathan SturtevantDocument4 pagesA New Approach To Cooperative Pathfinding (Short Paper) : Renee Jansen Nathan SturtevantithmeerNo ratings yet
- Using Constraint Programming and Local Search Methods To Solve Vehicle Routing ProblemsDocument14 pagesUsing Constraint Programming and Local Search Methods To Solve Vehicle Routing ProblemsYusiana KartikasariNo ratings yet
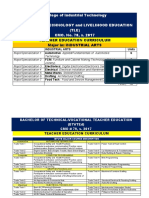
- College of Industrial Technology Bachelor of Technology and Livelihood Education (TLE) CMO. No. 78, S. 2017Document5 pagesCollege of Industrial Technology Bachelor of Technology and Livelihood Education (TLE) CMO. No. 78, S. 2017Industrial TechnologyNo ratings yet
- VATEUD Pilots ManualDocument32 pagesVATEUD Pilots ManualAndreas TzekasNo ratings yet
- 125 128Document4 pages125 128Majdi JerbiNo ratings yet
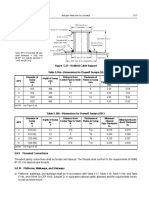
- Partial Full Volume of TankDocument8 pagesPartial Full Volume of TankBabita GuptaNo ratings yet
- Instructions To Employee For Submitting Online Application For Transfer Under Rule - 38 of Postal Manual Vol.-IVDocument6 pagesInstructions To Employee For Submitting Online Application For Transfer Under Rule - 38 of Postal Manual Vol.-IVSankarMathi VaigundhamNo ratings yet
- Accounting for Business CombinationsDocument52 pagesAccounting for Business CombinationsEliza BethNo ratings yet
- Mechatronic Project Progress Report W3Document5 pagesMechatronic Project Progress Report W3Hariz IzzuddinNo ratings yet
- List of COCDocument21 pagesList of COCjoan_padilla2000No ratings yet
- HACCP Plan With Flow Chart-1Document23 pagesHACCP Plan With Flow Chart-1Anonymous aZA07k8TXfNo ratings yet
- The King's Avatar - A Compilatio - Butterfly BlueDocument8,647 pagesThe King's Avatar - A Compilatio - Butterfly BlueDarka gamesNo ratings yet
- Process Costing-FifoDocument8 pagesProcess Costing-FifoMang OlehNo ratings yet
- Police Report Hearing RightsDocument7 pagesPolice Report Hearing RightsYatn BangadNo ratings yet
- Spirax-Sarco - Boiler Controls and SystemsDocument8 pagesSpirax-Sarco - Boiler Controls and SystemstpqnhatNo ratings yet
- Physical security system essentialsDocument5 pagesPhysical security system essentialsLindo Gondales Jr.No ratings yet
- Part 1 LEA 4 Law Enforcement Operations and Planning With Crime MappingDocument94 pagesPart 1 LEA 4 Law Enforcement Operations and Planning With Crime Mappingyomaeko CinkoNo ratings yet
- Normalization Castuera BSCS2CDocument8 pagesNormalization Castuera BSCS2CRichard, Jr. CastueraNo ratings yet
- Quiz ME 1Document4 pagesQuiz ME 1Radytia BimantaraNo ratings yet
- UPT Unit 8 Vers ADocument12 pagesUPT Unit 8 Vers AValeria GarciaNo ratings yet
- LeCroy 1996 Catalog (Reduced Size) PDFDocument196 pagesLeCroy 1996 Catalog (Reduced Size) PDFpetrocelliNo ratings yet
- OptiLobe Rotary Lobe PumpDocument4 pagesOptiLobe Rotary Lobe PumpRemus-Mihai GheorghitaNo ratings yet
- 3 Kinds of de Facto Government:: CharacteristicsDocument10 pages3 Kinds of de Facto Government:: CharacteristicsAbigael SeverinoNo ratings yet
- Design Thinking ReflectionDocument3 pagesDesign Thinking ReflectionNeil PerlasNo ratings yet
- CH 15 QuizDocument8 pagesCH 15 QuizNelano EastNo ratings yet
- Ultra Life ER14250 DatasheetDocument2 pagesUltra Life ER14250 DatasheetArslan AwanNo ratings yet
- TD102 Conductor - Standard ConductorsDocument2 pagesTD102 Conductor - Standard ConductorsHFandino1No ratings yet
- Preface: What Is Financial Intelligence?Document4 pagesPreface: What Is Financial Intelligence?Iuliana GondosNo ratings yet
- Community Development and Umbrella BodiesDocument20 pagesCommunity Development and Umbrella Bodiesmoi5566No ratings yet
- Shrimp Aquaculture in Sarangani BayDocument5 pagesShrimp Aquaculture in Sarangani BayronanvillagonzaloNo ratings yet
- Case Study - NISSANDocument5 pagesCase Study - NISSANChristy BuiNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- Practical TCP/IP and Ethernet Networking for IndustryFrom EverandPractical TCP/IP and Ethernet Networking for IndustryRating: 4 out of 5 stars4/5 (2)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- HACKING WITH KALI LINUX PENETRATION TESTING: Mastering Ethical Hacking Techniques with Kali Linux (2024 Guide for Beginners)From EverandHACKING WITH KALI LINUX PENETRATION TESTING: Mastering Ethical Hacking Techniques with Kali Linux (2024 Guide for Beginners)No ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet