You might also like
- My SeminarDocument17 pagesMy SeminarRajesh RadhakrishnanNo ratings yet
- 6 PDFDocument4 pages6 PDFtt_aljobory3911No ratings yet
- Development of A Miniaturized Motion Sensor For Tracking Warning Signs of Low-Back PainDocument8 pagesDevelopment of A Miniaturized Motion Sensor For Tracking Warning Signs of Low-Back PainharifidyrNo ratings yet
- Design of Grip Strength Measuring System Using FSR and Flex Sensors Using SVM AlgorithmDocument11 pagesDesign of Grip Strength Measuring System Using FSR and Flex Sensors Using SVM AlgorithmIAES IJAINo ratings yet
- Literature Review and Proposed Research: Alba Perez GraciaDocument34 pagesLiterature Review and Proposed Research: Alba Perez GraciaShubha ShriNo ratings yet
- Prof. Dr. Boris. R. Bracio, Khan AsadDocument1 pageProf. Dr. Boris. R. Bracio, Khan AsadÁSädKHänNo ratings yet
- 1909 09910 PDFDocument13 pages1909 09910 PDFDimitrije Mita PešićNo ratings yet
- Design & Analysis of Prosthetic Hand With EMG Technology in 3-D Printing MachineDocument5 pagesDesign & Analysis of Prosthetic Hand With EMG Technology in 3-D Printing MachineAll Engineering ElectronicsNo ratings yet
- IJSRET V7 Issue1 145Document8 pagesIJSRET V7 Issue1 145tomrobin1998No ratings yet
- IJSRET V7 Issue1 145Document8 pagesIJSRET V7 Issue1 145Sachin RathodNo ratings yet
- Cell Phone Usage and Shoulder PainDocument3 pagesCell Phone Usage and Shoulder PainKarlos ReynaNo ratings yet
- Sensors: Machine-Learning-Based Muscle Control of A 3D-Printed Bionic ArmDocument16 pagesSensors: Machine-Learning-Based Muscle Control of A 3D-Printed Bionic ArmDhinu LalNo ratings yet
- Design and Implementation of Upper Limb Rehabilitation Exoskeleton For Post-Stroke Patients - FullDocument6 pagesDesign and Implementation of Upper Limb Rehabilitation Exoskeleton For Post-Stroke Patients - FullTu DuongNo ratings yet
- Stress and Strain Analysis For The Prosthetic Hand Design Actuated by LinksDocument10 pagesStress and Strain Analysis For The Prosthetic Hand Design Actuated by Linksrahulsatvik09No ratings yet
- Instrumented Arthrometry of The Anterior Cruciate Ligament A ComparisonDocument4 pagesInstrumented Arthrometry of The Anterior Cruciate Ligament A ComparisonAdolfo La RocheNo ratings yet
- Oke Bessone2019 PrintDocument17 pagesOke Bessone2019 PrintAnisa FauziahNo ratings yet
- Final Attachment Published D 127 PDFDocument7 pagesFinal Attachment Published D 127 PDFReashad Fall 2022No ratings yet
- Ninapro DatasetDocument8 pagesNinapro DatasetSindhu VasireddyNo ratings yet
- A Home-Based Functional Hand-Extremity Assessment System For Stroke RehabilitationDocument2 pagesA Home-Based Functional Hand-Extremity Assessment System For Stroke Rehabilitationwijaya ajaaNo ratings yet
- Real Time Virtual Prosthetic Hand Controlled Using EMG SignalsDocument3 pagesReal Time Virtual Prosthetic Hand Controlled Using EMG SignalsViniciusNo ratings yet
- Biosensors 11 00411 v2Document15 pagesBiosensors 11 00411 v2tanvir anwarNo ratings yet
- Myoelectric Control With Abstract DecodersDocument16 pagesMyoelectric Control With Abstract DecodersLaura PasqualNo ratings yet
- Smart BracketsDocument6 pagesSmart BracketslahyouhNo ratings yet
- A 3D Printed, Bionic Hand Powered by EMG Signals and Controlled by An Online Neural NetworkDocument33 pagesA 3D Printed, Bionic Hand Powered by EMG Signals and Controlled by An Online Neural NetworkDr Edward PeterNo ratings yet
- (2018) (Medwell) SP Design of A Mechatronic Device For Measuring Stump Stresses On Transfemoral AmputeesDocument7 pages(2018) (Medwell) SP Design of A Mechatronic Device For Measuring Stump Stresses On Transfemoral AmputeesOscar AvilesNo ratings yet
- Measurement of Knee Joint Motion Using Digital Imaging: Original PaperDocument5 pagesMeasurement of Knee Joint Motion Using Digital Imaging: Original PaperAna-Maria ȘtefanNo ratings yet
- A Review On Design and Modeling of Artificial Hand: International Journal of Science and Research (IJSR) October 2020Document5 pagesA Review On Design and Modeling of Artificial Hand: International Journal of Science and Research (IJSR) October 2020vigneshNo ratings yet
- A Low-Cost, Open-Source, Compliant Hand For Enabling Sensorimotor Control For People With Transradial AmputationsDocument4 pagesA Low-Cost, Open-Source, Compliant Hand For Enabling Sensorimotor Control For People With Transradial Amputationsmanju.vs1546No ratings yet
- Control of Robot Using Data GloveDocument6 pagesControl of Robot Using Data GloveRajeswari MuruganNo ratings yet
- Bionic Arm Using Muscle SensorDocument11 pagesBionic Arm Using Muscle SensorIJRASETPublicationsNo ratings yet
- Applied Ergonomics: A. Yu, K.L. Yick, S.P. NG, J. YipDocument12 pagesApplied Ergonomics: A. Yu, K.L. Yick, S.P. NG, J. YipZiyaNo ratings yet
- Myoelectric Prosthetic Hand With A Proprioceptive Feedback SystemDocument8 pagesMyoelectric Prosthetic Hand With A Proprioceptive Feedback SystemLaura PasqualNo ratings yet
- Analysis of Myoelectric Signals To Prosthesis ApplicationsDocument8 pagesAnalysis of Myoelectric Signals To Prosthesis ApplicationsBrunaNo ratings yet
- Pang 2021Document13 pagesPang 2021yalocim666No ratings yet
- Wearable Sensors For Gait AnalysisDocument5 pagesWearable Sensors For Gait AnalysissanahujalidiaNo ratings yet
- Castellini 2014Document5 pagesCastellini 2014Fernando PadillaNo ratings yet
- IJEDR1803109 - Myoelectric Hand PDFDocument5 pagesIJEDR1803109 - Myoelectric Hand PDFUmang SutharNo ratings yet
- Acquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsDocument12 pagesAcquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsEdgarGonzálezNo ratings yet
- IJEDR1803109Document6 pagesIJEDR1803109NilutpalNo ratings yet
- A Novel Predictive Approach To Prosthetic Control For Digit Amputations Using Grip ClassificationDocument6 pagesA Novel Predictive Approach To Prosthetic Control For Digit Amputations Using Grip Classificationvicky tNo ratings yet
- Analysis of Grasping Strategies and Function in Hemiparetic Patients Using An Instrumented ObjectDocument8 pagesAnalysis of Grasping Strategies and Function in Hemiparetic Patients Using An Instrumented ObjectUttam GrandhiNo ratings yet
- Virtual Artificial Sensor Technique For Functional Electrical StimulationDocument11 pagesVirtual Artificial Sensor Technique For Functional Electrical StimulationCarlos Alexandre FerriNo ratings yet
- Aero 6sem ESADocument103 pagesAero 6sem ESAram rakNo ratings yet
- A Wireless Implementation of A Prosthetic Animatronic HandDocument5 pagesA Wireless Implementation of A Prosthetic Animatronic HandOBAID MUFIZNo ratings yet
- A Silicon-Based Tactile Sensor ForDocument9 pagesA Silicon-Based Tactile Sensor ForduonglacbkNo ratings yet
- DWang YuchenDocument9 pagesDWang Yuchensafa ameurNo ratings yet
- OcclusionanalysisofteethDocument4 pagesOcclusionanalysisofteethCinthia MossoNo ratings yet
- Palma Et Al-2006-ScanningDocument4 pagesPalma Et Al-2006-ScanningEmrah ÇAMNo ratings yet
- DHEY - PPT - SmartTextile For Health & FutureDocument9 pagesDHEY - PPT - SmartTextile For Health & FutureDhyey asharNo ratings yet
- Clinical Outcomes of A Low-Cost Single-Channel Myoelectric-Interface Three-Dimensional Hand ProsthesisDocument8 pagesClinical Outcomes of A Low-Cost Single-Channel Myoelectric-Interface Three-Dimensional Hand ProsthesisHans WuNo ratings yet
- Finger Force Capability - 10.1.1.498.673Document103 pagesFinger Force Capability - 10.1.1.498.673Sidney M. SilvaNo ratings yet
- Animatronic Hand Using Arduino: S. B. Jain Institute of Technology Management and Research, Nagpur, Maharashtra, IndiaDocument4 pagesAnimatronic Hand Using Arduino: S. B. Jain Institute of Technology Management and Research, Nagpur, Maharashtra, IndiaOBAID MUFIZNo ratings yet
- Art 20171455Document5 pagesArt 20171455guessab.abdelfetahNo ratings yet
- Miniature Force-Torque Sensor Using Semiconductor Strain Gage Sensor Frame Design and Analysis For DevelopmentDocument2 pagesMiniature Force-Torque Sensor Using Semiconductor Strain Gage Sensor Frame Design and Analysis For DevelopmentAnthony Gómez UreñaNo ratings yet
- PM540WCDocument6 pagesPM540WCMiron ShikulaNo ratings yet
- 2101 6325 1 PBDocument11 pages2101 6325 1 PBAndrés RamírezNo ratings yet
- Elbow Loaded FEM and ExperimentDocument10 pagesElbow Loaded FEM and ExperimentmtwakadNo ratings yet
- 3-DoF Wearable Haptic DisplayDocument13 pages3-DoF Wearable Haptic DisplaycarlosNo ratings yet
- Digital Inclinometer For Joint Angles Measurements With A Real-Time 3d-AnimationDocument7 pagesDigital Inclinometer For Joint Angles Measurements With A Real-Time 3d-AnimationgodbugNo ratings yet
- Design and Implementation of Portable Impedance AnalyzersFrom EverandDesign and Implementation of Portable Impedance AnalyzersNo ratings yet
- Laser SafetyDocument1 pageLaser SafetyaravindappiNo ratings yet
- Sap User Id Creation FormDocument1 pageSap User Id Creation FormaravindappiNo ratings yet
- Annexure 1 Machine Safety Requirements For RFQDocument2 pagesAnnexure 1 Machine Safety Requirements For RFQaravindappiNo ratings yet
- Annexure - Equipment Inspection Check Sheet EESLDocument13 pagesAnnexure - Equipment Inspection Check Sheet EESLaravindappiNo ratings yet
- General Safety Code of ConductDocument333 pagesGeneral Safety Code of ConductJaved KhanNo ratings yet
- Electrical Safety Manual Lockout TestDocument217 pagesElectrical Safety Manual Lockout TestOscar Leonardo Rincon PulidoNo ratings yet
- Safety Mangagement System-IntroductionDocument3 pagesSafety Mangagement System-IntroductionaravindappiNo ratings yet
- Cognitive Ergonomics: This Chapter ProvidesDocument24 pagesCognitive Ergonomics: This Chapter ProvidesattaurrehmanNo ratings yet
- 2 BHK Flat On Rent AvailableDocument1 page2 BHK Flat On Rent AvailablearavindappiNo ratings yet
- Standard S Eci Cation of Multipurpose Fire TenderDocument9 pagesStandard S Eci Cation of Multipurpose Fire TenderaravindappiNo ratings yet
- ARAVIND APPI RAJ.O, DGM - Central Safety Council: Role DescriptionDocument2 pagesARAVIND APPI RAJ.O, DGM - Central Safety Council: Role DescriptionaravindappiNo ratings yet
- Sqdcme & SDT TeamDocument16 pagesSqdcme & SDT Teamaravindappi100% (1)
- SG-16 Safety Guideline For Fire SafetyDocument21 pagesSG-16 Safety Guideline For Fire SafetyaravindappiNo ratings yet
- Quot B&S MR - Avinash Revise PDFDocument1 pageQuot B&S MR - Avinash Revise PDFaravindappiNo ratings yet
- 04 Consultation Services ADocument20 pages04 Consultation Services AkrissregionNo ratings yet
- LOTO StepsDocument1 pageLOTO StepsaravindappiNo ratings yet
- NFPA 33 Paint Booth Check SheetDocument19 pagesNFPA 33 Paint Booth Check Sheetaravindappi100% (1)
- Understanding ATEXDocument14 pagesUnderstanding ATEXFavas KvpNo ratings yet
- Elevating Safety Culture Through BBSDocument189 pagesElevating Safety Culture Through BBSaravindappiNo ratings yet
- Tripod TrainingDocument3 pagesTripod TrainingaravindappiNo ratings yet
- PTN Guide Compilation by EmeraldchowDocument24 pagesPTN Guide Compilation by EmeraldchowMirzaNo ratings yet
- 1991 - Defect Chemistry of BaTiO3Document20 pages1991 - Defect Chemistry of BaTiO3Beh NaatNo ratings yet
- Himachal Pradesh Staff Selection Commission Hamirpur - 177001Document2 pagesHimachal Pradesh Staff Selection Commission Hamirpur - 177001Verma JagdeepNo ratings yet
- Functional Materials For Sustainable Energy TechnologiesDocument15 pagesFunctional Materials For Sustainable Energy TechnologiesChristhy Vanessa Ruiz MadroñeroNo ratings yet
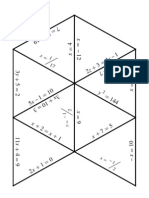
- Algebra1 Review PuzzleDocument3 pagesAlgebra1 Review PuzzleNicholas Yates100% (1)
- 2021 3 AbstractsDocument168 pages2021 3 AbstractsLong An ĐỗNo ratings yet
- Si2304 (Mosfet Sot 23)Document6 pagesSi2304 (Mosfet Sot 23)Alfredo Valencia RodriguezNo ratings yet
- St. Louis College of Bulanao: Title/Topic Technical English I Introduction To Police Report WritingDocument41 pagesSt. Louis College of Bulanao: Title/Topic Technical English I Introduction To Police Report WritingNovelyn LumboyNo ratings yet
- NEC G266 Quick Reference GuideDocument3 pagesNEC G266 Quick Reference GuideIonut Gabriel DascaluNo ratings yet
- A C Engines and Jet Propulsion1Document16 pagesA C Engines and Jet Propulsion1Mukesh KumarNo ratings yet
- Individual Performance Commitment and Review Form (Ipcrf) : Annex EDocument8 pagesIndividual Performance Commitment and Review Form (Ipcrf) : Annex Emenzi magnoNo ratings yet
- PCBDocument5 pagesPCBarampandey100% (4)
- Cusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Document1 pageCusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Suresh NatarajanNo ratings yet
- Xgenus X-Ray PDFDocument61 pagesXgenus X-Ray PDFAli NuriNo ratings yet
- Data Migration Good DocumentDocument16 pagesData Migration Good Documentsambit76No ratings yet
- One Wavelength To Loop SkywireDocument2 pagesOne Wavelength To Loop SkywireRobert TurnerNo ratings yet
- Wish Upon A STAR: Presented By: Daulo, Eunice R. III - Block 3Document17 pagesWish Upon A STAR: Presented By: Daulo, Eunice R. III - Block 3nhyce18No ratings yet
- 1506a E88tag3 PDFDocument5 pages1506a E88tag3 PDFmohammad javad golNo ratings yet
- Statistical MethodsDocument77 pagesStatistical MethodsGuruKPO100% (1)
- Delonghi Pinguino Water To Air Pac We125 Instruction Manual 715678Document21 pagesDelonghi Pinguino Water To Air Pac We125 Instruction Manual 715678Luis AlbertoAlmeidaSilva100% (1)
- Lubricants - McMaster-CarrDocument8 pagesLubricants - McMaster-CarrjeanyoperNo ratings yet
- NC Error PropagationDocument12 pagesNC Error PropagationSalman KhanNo ratings yet
- Accommodating Expansion of Brickwork: Technical Notes 18ADocument13 pagesAccommodating Expansion of Brickwork: Technical Notes 18AWissam AlameddineNo ratings yet
- Entropy Equation For A Control VolumeDocument12 pagesEntropy Equation For A Control VolumenirattisaikulNo ratings yet
- Communicative English Lab Manual 1643268175Document24 pagesCommunicative English Lab Manual 1643268175Dimple BhatiNo ratings yet
- Python - Data EngineeringDocument34 pagesPython - Data EngineeringChetan PatilNo ratings yet
- Literature Review On Parking SpaceDocument6 pagesLiterature Review On Parking Spacefvgy6fn3100% (1)
- Is There Any Way To Download The Whole Package of Asphalt 8 Airborne So That I Can Install It On Any Android Device Without An Internet Connection - QuoraDocument4 pagesIs There Any Way To Download The Whole Package of Asphalt 8 Airborne So That I Can Install It On Any Android Device Without An Internet Connection - QuoraMounir2105No ratings yet
- Staad 4Document37 pagesStaad 4saisssms9116100% (2)
- صيانة المولدات و المحولات الكهربائيهDocument15 pagesصيانة المولدات و المحولات الكهربائيهMostafa AllamNo ratings yet