You might also like
- VW Canbus BasicDocument32 pagesVW Canbus BasicDzulkiflee Hj Hamdan100% (3)
- Service Training: Audi Data Bus TechnologiesDocument127 pagesService Training: Audi Data Bus TechnologiespabloNo ratings yet
- Data Bus Tech PDFDocument124 pagesData Bus Tech PDFeurospecNo ratings yet
- Audi Service Training Audi Data Bus TechnologiesDocument10 pagesAudi Service Training Audi Data Bus Technologiesterry100% (33)
- Service Training: Audi Data Bus TechnologiesDocument128 pagesService Training: Audi Data Bus TechnologiesΠέτρος Καραμπίλας100% (1)
- Data Transfer On CAN Data Bus II para ImprimirDocument60 pagesData Transfer On CAN Data Bus II para ImprimirFernando Jordan Barreto100% (1)
- Data Transfer On CAN Data Bus II: Self-Study Programme 269Document62 pagesData Transfer On CAN Data Bus II: Self-Study Programme 269Mai Đức Minh100% (1)
- Esc 445 (CAN)Document14 pagesEsc 445 (CAN)jmdelacruzNo ratings yet
- Audi CAN Data Bus PDFDocument32 pagesAudi CAN Data Bus PDFJOHNNY5377No ratings yet
- SSP 286 New Data Bus SystemsDocument26 pagesSSP 286 New Data Bus Systemsภูเก็ต เป็นเกาะ100% (1)
- AN1077 Application Note: Overview of Enhanced Can Controllers For St7 and St9 McusDocument14 pagesAN1077 Application Note: Overview of Enhanced Can Controllers For St7 and St9 McusAlexNo ratings yet
- Can Tutorials 1Document11 pagesCan Tutorials 1OMKAR21100% (3)
- Audi CAN Data BusDocument32 pagesAudi CAN Data BusJoseph Morant100% (1)
- Can BusDocument34 pagesCan Bushneto1975100% (4)
- Multi-Motor Control System Design Based On Can BusDocument4 pagesMulti-Motor Control System Design Based On Can BusPrakash ArulNo ratings yet
- CANape Basics WhitePaper enDocument15 pagesCANape Basics WhitePaper enwlidhaaa0% (1)
- CAN Hardware DtailsDocument21 pagesCAN Hardware DtailsratheeshbrNo ratings yet
- SSP 370 Crafter Electrical SystemDocument84 pagesSSP 370 Crafter Electrical SystemJavier GarciaNo ratings yet
- 01 - Introduction To Bus SystemsDocument35 pages01 - Introduction To Bus SystemsJesus VelaNo ratings yet
- Spho VW Can Data Bus Int.Document145 pagesSpho VW Can Data Bus Int.Niza JamilNo ratings yet
- Can EngDocument29 pagesCan EngEggar GonzalezNo ratings yet
- Getting To The Heart of CAN Technology: Diagnostic Tests On CAN Bus Vehicles..Document1 pageGetting To The Heart of CAN Technology: Diagnostic Tests On CAN Bus Vehicles..احمدميدوNo ratings yet
- Study On The Embedded CAN Bus Control System in The Vehicle PDFDocument4 pagesStudy On The Embedded CAN Bus Control System in The Vehicle PDFsrcembeddedNo ratings yet
- ARTIGO - Controller Area Networks and The Protocol CAN For Machine Control SystemsDocument14 pagesARTIGO - Controller Area Networks and The Protocol CAN For Machine Control SystemsDAN_73No ratings yet
- Can BusDocument14 pagesCan BusNguyễn VỹNo ratings yet
- Soc Implementation of Can ControllerDocument3 pagesSoc Implementation of Can ControllerPrashant GiriNo ratings yet
- Implementation of CAN Bus in An Autonomous All-Terrain VehicleDocument14 pagesImplementation of CAN Bus in An Autonomous All-Terrain VehiclePradeep CheekatlaNo ratings yet
- (Accredited by NAACA+, Affiliated To JNTUH HYDERABAD Review of Internship Presentation ONDocument17 pages(Accredited by NAACA+, Affiliated To JNTUH HYDERABAD Review of Internship Presentation ONJinugu VarunNo ratings yet
- VinayKumarV MRaghavaCharyulu 129 PDFDocument7 pagesVinayKumarV MRaghavaCharyulu 129 PDFUpendra VaddeNo ratings yet
- Basic BusDocument5 pagesBasic BusSu DeshNo ratings yet
- Cpre 458/558: Real-Time Systems: Controller Area NetworkDocument27 pagesCpre 458/558: Real-Time Systems: Controller Area NetworksinasayedanaNo ratings yet
- CAN BusDocument14 pagesCAN BusMoh.Iqbal Haryono Putra100% (1)
- Mem761 PDFDocument4 pagesMem761 PDFJoshua JOSHUANo ratings yet
- CAN Bus: Jump To Navigation Jump To Search Vehicle Bus Microcontrollers Host Computer Message-Based Protocol MultiplexDocument25 pagesCAN Bus: Jump To Navigation Jump To Search Vehicle Bus Microcontrollers Host Computer Message-Based Protocol MultiplexBenjamin HouseNo ratings yet
- Engineer's Guide To CanbusDocument16 pagesEngineer's Guide To Canbusdsldrvr100% (4)
- BMW Introduction To Bus SystemsDocument35 pagesBMW Introduction To Bus Systemsgraig2792% (12)
- Bus System Troubleshooting: SubjectDocument31 pagesBus System Troubleshooting: SubjectAlexia GrammatikopoulouNo ratings yet
- 1.CAN IntroductionDocument5 pages1.CAN IntroductionKrishanu ModakNo ratings yet
- Ai Exp 7THDocument15 pagesAi Exp 7THAnand PatilNo ratings yet
- CAN F137-M139 UK Version 2Document59 pagesCAN F137-M139 UK Version 2aiigee75% (4)
- Autonomous CarDocument41 pagesAutonomous CarZia AzamNo ratings yet
- Controller Area Network (CAN) Core - iCAN: Intelliga Integrated Design LTDDocument6 pagesController Area Network (CAN) Core - iCAN: Intelliga Integrated Design LTDpeter003No ratings yet
- AI Exp 7Document7 pagesAI Exp 7akash kurheNo ratings yet
- FH 4 Multiplicação Interna QTS PDF - PDF - Steering - Anti Lock Braking SystemDocument183 pagesFH 4 Multiplicação Interna QTS PDF - PDF - Steering - Anti Lock Braking Systembouchaib crouchNo ratings yet
- Combine PDFDocument43 pagesCombine PDFrohimiNo ratings yet
- Ps - 4618service Training - Self Study Programme 470 - The Touareg 2011 - Electrics Electronics - Design and FunctionDocument56 pagesPs - 4618service Training - Self Study Programme 470 - The Touareg 2011 - Electrics Electronics - Design and FunctionRazvan BorsNo ratings yet
- Contactless CAN Interface - A Standard For Aftermarket AutomotiveDocument6 pagesContactless CAN Interface - A Standard For Aftermarket Automotivespamail73887No ratings yet
- SSP 186 CanDocument29 pagesSSP 186 CanKorkut ErdenNo ratings yet
- Automatic Conveyor For Industrial AutomationDocument3 pagesAutomatic Conveyor For Industrial AutomationSoni BhattaNo ratings yet
- 2Document4 pages2SaiSaiNo ratings yet
- 15-3 CNLM WebDocument48 pages15-3 CNLM WebAu GroupsNo ratings yet
- CanBus WikipidiaDocument23 pagesCanBus WikipidiaZaw Min NaingNo ratings yet
- CAN BusDocument15 pagesCAN BusKrishanu ModakNo ratings yet
- I Jcs It 2012030294Document5 pagesI Jcs It 2012030294Ahmed AricheNo ratings yet
- k01 000 00 PDFDocument15 pagesk01 000 00 PDFomairyNo ratings yet
- Transmision 0BW HybridFWDDocument171 pagesTransmision 0BW HybridFWDRoberto Garcia GodoyNo ratings yet
- ManualTrabajo Q4Etron High Voltage - BatteryDocument93 pagesManualTrabajo Q4Etron High Voltage - BatteryRoberto Garcia GodoyNo ratings yet
- ManualTrabajo Q4 Etron CommunicationDocument52 pagesManualTrabajo Q4 Etron CommunicationRoberto Garcia GodoyNo ratings yet
- Info Q50 TCM Jtdwa5681gbDocument8 pagesInfo Q50 TCM Jtdwa5681gbRoberto Garcia GodoyNo ratings yet
- 2013-TechTalk-QX60 Pathfinder Special IssueDocument38 pages2013-TechTalk-QX60 Pathfinder Special IssueRoberto Garcia GodoyNo ratings yet
- 2023 Infiniti QX80 QRGDocument36 pages2023 Infiniti QX80 QRGRoberto Garcia GodoyNo ratings yet
- VW Keycode Jetta-AdaptacionDocument1 pageVW Keycode Jetta-AdaptacionRoberto Garcia GodoyNo ratings yet
- Qx50 NAM 2023 SchematicsDocument372 pagesQx50 NAM 2023 SchematicsRoberto Garcia GodoyNo ratings yet
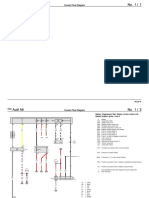
- 4.2l Petrol Engine, CDRA: Current Flow DiagramDocument1,857 pages4.2l Petrol Engine, CDRA: Current Flow DiagramRoberto Garcia GodoyNo ratings yet
- 2015 TechTalk CVT Special EditionDocument39 pages2015 TechTalk CVT Special EditionRoberto Garcia Godoy50% (2)
- D4B8090BA0C-8-speed Automatic Gearbox 0D6Document131 pagesD4B8090BA0C-8-speed Automatic Gearbox 0D6Roberto Garcia GodoyNo ratings yet
- ASSP0045720-Nr 457 Audi A8 '10 Power TransmissionDocument68 pagesASSP0045720-Nr 457 Audi A8 '10 Power TransmissionRoberto Garcia GodoyNo ratings yet
- D4B80983A42 CommunicationDocument57 pagesD4B80983A42 CommunicationRoberto Garcia GodoyNo ratings yet
- Financial Performance of State Bank of India: Dr.G. KanagavalliDocument13 pagesFinancial Performance of State Bank of India: Dr.G. KanagavalliANKIT GUPTANo ratings yet
- Nirosoft Mobile Water Purification BrochureDocument4 pagesNirosoft Mobile Water Purification BrochureIsrael ExporterNo ratings yet
- Tasawwuf: SlamicDocument221 pagesTasawwuf: SlamicMas ThulanNo ratings yet
- Non-Food Manufacturing Plant ProjectsDocument1 pageNon-Food Manufacturing Plant ProjectsAllen Kenneth Masilungan100% (1)
- Wooden Knife Handle and SheathDocument10 pagesWooden Knife Handle and SheathMehmet Emre Bastopcu100% (2)
- Mutual Fund Term PaperDocument20 pagesMutual Fund Term PaperManish GuptaNo ratings yet
- Contemporary World Assignment #2Document3 pagesContemporary World Assignment #2JacquelineBaquiranNo ratings yet
- Knowledge Work & Human CapitalDocument2 pagesKnowledge Work & Human Capitalchandnioptom100% (2)
- Applying Organizational Routines in Understanding Organizational ChangeDocument17 pagesApplying Organizational Routines in Understanding Organizational ChangeJack000123No ratings yet
- G.R. No. 83122Document7 pagesG.R. No. 83122Hanifa D. Al-ObinayNo ratings yet
- Director Manager Operations Pharmacy in Los Angeles CA Resume Philip HoDocument2 pagesDirector Manager Operations Pharmacy in Los Angeles CA Resume Philip HoPhilipHo2No ratings yet
- Scoring of 16PFDocument50 pagesScoring of 16PFKhristina Anne Ama80% (5)
- Testbank: Chapter 1 The Concept of Strategy: True/False QuestionsDocument8 pagesTestbank: Chapter 1 The Concept of Strategy: True/False QuestionsSanket Sourav BalNo ratings yet
- Law RTP May 2023Document57 pagesLaw RTP May 2023ROCKYNo ratings yet
- NetstatDocument1 pageNetstatM Faaiq Al AzharNo ratings yet
- Taking The Test of Essential Academic Skills (TEAS)Document2 pagesTaking The Test of Essential Academic Skills (TEAS)nicole olivaNo ratings yet
- Mechanical Engineering: An International Journal (MECHIJ)Document2 pagesMechanical Engineering: An International Journal (MECHIJ)CS & ITNo ratings yet
- Whats Up Starter SB 2edition Unit 1-2-3-5Document44 pagesWhats Up Starter SB 2edition Unit 1-2-3-5Gastonazo67% (3)
- Api 650Document16 pagesApi 650cfpc10459No ratings yet
- Cartridge Valves Technical Information Directional Valves DCV 03Document12 pagesCartridge Valves Technical Information Directional Valves DCV 03francis_15inNo ratings yet
- Basic Offshore Survival and Emergency Training StandardDocument18 pagesBasic Offshore Survival and Emergency Training StandardAnas Abd Rahman100% (1)
- Joint Accounts On Forex DepositsDocument2 pagesJoint Accounts On Forex DepositsdailydoseoflawNo ratings yet
- Animal 10 Summative 4Document4 pagesAnimal 10 Summative 4Maricar RaymundoNo ratings yet
- AADocument238 pagesAAmarnekibNo ratings yet
- Instruction Manual For Tanabe Main Air CompressorDocument86 pagesInstruction Manual For Tanabe Main Air Compressorprateek agarwal100% (6)
- 09g MasterplanDocument83 pages09g Masterplanabdikarim_omarNo ratings yet
- Estimation of An OfficeDocument29 pagesEstimation of An OfficeJincy JohnsonNo ratings yet
- 001-0001-12 Quality System ManualDocument12 pages001-0001-12 Quality System ManualPramod AthiyarathuNo ratings yet
- Form 4 PF WithdrawlDocument2 pagesForm 4 PF WithdrawlRajshree DubeyNo ratings yet