You might also like
- Answers 1220618085860270 8Document11 pagesAnswers 1220618085860270 8monalishas_171% (7)
- MA 241 SyllabusDocument5 pagesMA 241 SyllabusLaurenBarthenheierNo ratings yet
- Penn State Statics Course Fall 2014Document7 pagesPenn State Statics Course Fall 2014mundzzNo ratings yet
- ECE 201 Introduction To Signals and Systems: CRN #80681 Fall 2017 SyllabusDocument5 pagesECE 201 Introduction To Signals and Systems: CRN #80681 Fall 2017 SyllabusAaron SmithNo ratings yet
- MAE 241 Sierros Summer Semester 2009Document4 pagesMAE 241 Sierros Summer Semester 2009kostas.sierros9374No ratings yet
- Syllabus A Physics 14 Fall 2015Document7 pagesSyllabus A Physics 14 Fall 2015api-225960274No ratings yet
- MAE 241 - Syllabus Summer 2011Document5 pagesMAE 241 - Syllabus Summer 2011kostas.sierros9374No ratings yet
- ECON 3104: Microeconomic Theory: TH THDocument4 pagesECON 3104: Microeconomic Theory: TH THwssanbornNo ratings yet
- PHY 300 - Mechanics: Fall 2010Document6 pagesPHY 300 - Mechanics: Fall 2010Sai Swetha KVNo ratings yet
- CE326 3 Syl 16 Winter ChoDocument5 pagesCE326 3 Syl 16 Winter Chobabsy017No ratings yet
- CHE 330 SyllabusDocument5 pagesCHE 330 Syllabusbuggs1152No ratings yet
- General Physics II SyllabusDocument4 pagesGeneral Physics II SyllabusJaneFreeNo ratings yet
- Course Information Course Description: Mlevins@purdue - EduDocument4 pagesCourse Information Course Description: Mlevins@purdue - Edubozzaitabob4493No ratings yet
- PHYS - 1112 - Nguyen - 27133 Ans 27144Document8 pagesPHYS - 1112 - Nguyen - 27133 Ans 27144cjNo ratings yet
- Snodgrass ATMS120 Syllabus FA15Document2 pagesSnodgrass ATMS120 Syllabus FA15Lloyd AllenNo ratings yet
- Econ401 - Syllabus - W22 UmichDocument5 pagesEcon401 - Syllabus - W22 UmichNecromancerNo ratings yet
- Engineering Physics-Electricity and Magnetism Spring 2020Document4 pagesEngineering Physics-Electricity and Magnetism Spring 2020JeraldNo ratings yet
- Math 256 Statistics Spring 2011Document5 pagesMath 256 Statistics Spring 2011Laksamana NusantaraNo ratings yet
- Usf 320 01 Syl s17Document3 pagesUsf 320 01 Syl s17api-282211401No ratings yet
- Physics of Vibrations and Waves: PHYS 224 Spring 2018Document5 pagesPhysics of Vibrations and Waves: PHYS 224 Spring 2018sahrul s.No ratings yet
- MATH1020U - Syllabus Winter 2013 PDFDocument6 pagesMATH1020U - Syllabus Winter 2013 PDFsunnyopgNo ratings yet
- Syl Sydney PHYS-UA9012 Roper Spring2018Document12 pagesSyl Sydney PHYS-UA9012 Roper Spring2018diingdeng557No ratings yet
- Dynamics Policy F18Document4 pagesDynamics Policy F18robinnew19No ratings yet
- Spring 2020 PHYS 224 Vibrations and WavesDocument6 pagesSpring 2020 PHYS 224 Vibrations and WavesSukardiyono Sukardiyono FMIPANo ratings yet
- PHYS 101 Mechanics (With Lab) Summer 2018 Purpose and Objectives of The CourseDocument5 pagesPHYS 101 Mechanics (With Lab) Summer 2018 Purpose and Objectives of The CourseJuan Omar Valle MartínezNo ratings yet
- Math 151 WillettDocument4 pagesMath 151 WillettelegantedoNo ratings yet
- Math 2R03: Linear Algebra Ii: Yazinski@math - Mcmaster.caDocument5 pagesMath 2R03: Linear Algebra Ii: Yazinski@math - Mcmaster.cadestinysoldierNo ratings yet
- Physics 2053 Syllabus Fall 2014Document6 pagesPhysics 2053 Syllabus Fall 2014nullNo ratings yet
- MAT 101 Syllabi - Fall 2015Document5 pagesMAT 101 Syllabi - Fall 2015Erica CalalangNo ratings yet
- Temple Phys 2921 SyllabusDocument5 pagesTemple Phys 2921 SyllabusasdNo ratings yet
- Multi SyllabusDocument5 pagesMulti SyllabusJulia YuNo ratings yet
- phs101 PDFDocument2 pagesphs101 PDFsuryapratamaNo ratings yet
- 505syl2015 PDFDocument4 pages505syl2015 PDFEdmund ZinNo ratings yet
- MAT 296 SyllabusDocument6 pagesMAT 296 Syllabusmathematics2x2lifeNo ratings yet
- UC Berkeley Psych 101 Research Methods Course SyllabusDocument3 pagesUC Berkeley Psych 101 Research Methods Course Syllabusskipbeatx3No ratings yet
- Physics 107Document6 pagesPhysics 107Pascal PhilipNo ratings yet
- Physics 6 SyllabusDocument8 pagesPhysics 6 Syllabusapi-225960274No ratings yet
- Math 125 SyllabusDocument2 pagesMath 125 SyllabusAlpha BetaNo ratings yet
- Economics 3503: Introduction To Econometrics Fall 2019: Instructor Email Office Phone Number Office Address Office HoursDocument8 pagesEconomics 3503: Introduction To Econometrics Fall 2019: Instructor Email Office Phone Number Office Address Office HoursLimSiEianNo ratings yet
- 2020 Revised Syllabus Ap CalcDocument3 pages2020 Revised Syllabus Ap Calcapi-281453279No ratings yet
- Math 121-5168 sp16 Online OutlineDocument7 pagesMath 121-5168 sp16 Online Outlineapi-306573165No ratings yet
- 1328 Syllabus Spring 2022Document10 pages1328 Syllabus Spring 2022Rawda GhalbanNo ratings yet
- Syl - ME 335Document4 pagesSyl - ME 335ellie<3No ratings yet
- Check The University's Catalogue and Check With The Physics DepartmentDocument3 pagesCheck The University's Catalogue and Check With The Physics DepartmentRobert KelleherNo ratings yet
- PH101 SyllabusDocument3 pagesPH101 SyllabustheboatNo ratings yet
- MAT 284 Business Calculus SyllabusDocument4 pagesMAT 284 Business Calculus SyllabusAnonymous bZTdTpLNo ratings yet
- MACT1121 Outline Spring 2019Document5 pagesMACT1121 Outline Spring 2019Kerolos AtefNo ratings yet
- UT Dallas Syllabus For Math1325.501.08s Taught by Tommy Thompson (txt074000)Document9 pagesUT Dallas Syllabus For Math1325.501.08s Taught by Tommy Thompson (txt074000)UT Dallas Provost's Technology GroupNo ratings yet
- Solar System and Exoplanets Summer CourseDocument5 pagesSolar System and Exoplanets Summer CourseAmy HuNo ratings yet
- Ee 179/ece 172: Linear Control System: Engr. Edilberto C. Vergara, JRDocument3 pagesEe 179/ece 172: Linear Control System: Engr. Edilberto C. Vergara, JRJohn Paul GarciaNo ratings yet
- FST SyllabusDocument3 pagesFST Syllabusapi-281453279No ratings yet
- PHYS 260 0201-0206 Syllabus Fall 2013 UMDDocument6 pagesPHYS 260 0201-0206 Syllabus Fall 2013 UMDGerald HaywardNo ratings yet
- CMGT 3315 BoylanDocument6 pagesCMGT 3315 BoylanMazharHossamNo ratings yet
- Econ 100c Syllabus Ssi13Document7 pagesEcon 100c Syllabus Ssi13other1991No ratings yet
- FE 610 Probability and Stochastic Processes For Finance: ObjectivesDocument5 pagesFE 610 Probability and Stochastic Processes For Finance: ObjectivesSpdSudheerNo ratings yet
- 107 SyllabusDocument4 pages107 SyllabusSingh TomarNo ratings yet
- UT Dallas Syllabus For Psy2317.0u1.08u Taught by Kristin Atchison (Kja042000)Document4 pagesUT Dallas Syllabus For Psy2317.0u1.08u Taught by Kristin Atchison (Kja042000)UT Dallas Provost's Technology GroupNo ratings yet
- Electrical Simulation Lab Manual PDFDocument55 pagesElectrical Simulation Lab Manual PDFAnu tiwari0% (1)
- Dm5218s Insulation TesterDocument16 pagesDm5218s Insulation TesterganeshNo ratings yet
- Rheologica Acta Volume 9 Issue 4 1970 (Doi 10.1007 - bf01985475) N. D. Waters - M. J. King - Unsteady Flow of An Elastico-Viscous Liquid PDFDocument1 pageRheologica Acta Volume 9 Issue 4 1970 (Doi 10.1007 - bf01985475) N. D. Waters - M. J. King - Unsteady Flow of An Elastico-Viscous Liquid PDFSrinivas JangiliNo ratings yet
- Part A (Level 1) A: True or False QuestionsDocument10 pagesPart A (Level 1) A: True or False Questionsshirley wongNo ratings yet
- Rocket Equation Derivation NotesDocument7 pagesRocket Equation Derivation NotesSrikar GhooliNo ratings yet
- PhySICS Paper With AnswerDocument5 pagesPhySICS Paper With Answersudhir_narang_3No ratings yet
- Physics - Electric Field - Electrostatic ForceDocument3 pagesPhysics - Electric Field - Electrostatic ForceRichelleNo ratings yet
- Armature Reaction EffectsDocument4 pagesArmature Reaction EffectsnjnvsrNo ratings yet
- Eee141 Lab ManualDocument29 pagesEee141 Lab ManualSakib AhmedNo ratings yet
- 1516862181FSC P4 M31 E-TextDocument10 pages1516862181FSC P4 M31 E-TextKanchanNo ratings yet
- Ac300 SeriesDocument95 pagesAc300 SeriesTruongAnNo ratings yet
- Kinesiology MCQSDocument22 pagesKinesiology MCQSManal Asad100% (1)
- Grid maintenance and P&I trainingDocument18 pagesGrid maintenance and P&I trainingArslan AhmadNo ratings yet
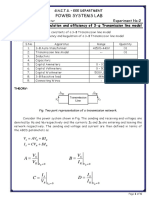
- 2.ABCD constants and Regulation of 3-φ Transmission line modelDocument6 pages2.ABCD constants and Regulation of 3-φ Transmission line modelBhanuNo ratings yet
- EP07 Measuring Coefficient of Viscosity of Castor OilDocument2 pagesEP07 Measuring Coefficient of Viscosity of Castor OilKw ChanNo ratings yet
- Calc Temp Load Capable of Cable-Neher-McGrathDocument13 pagesCalc Temp Load Capable of Cable-Neher-McGrathmcavy100% (1)
- By:Dr - Maham MasoodDocument39 pagesBy:Dr - Maham Masoodamema batoolNo ratings yet
- Act For ElectromagnetismDocument2 pagesAct For ElectromagnetismHaisoj Leintho SalupNo ratings yet
- Fluid Vortex-Type Flow, Vortex Line, Vortexline, Vortex Tube, Vortex CoreDocument3 pagesFluid Vortex-Type Flow, Vortex Line, Vortexline, Vortex Tube, Vortex CoreJason RossNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- Voltage Regulation Determination Using Synchronous Impedance MethodDocument6 pagesVoltage Regulation Determination Using Synchronous Impedance MethodSarthak GautamNo ratings yet
- Hokei MINATO Magnetic MotorDocument31 pagesHokei MINATO Magnetic Motormorsee100% (4)
- 5TH Week EnergyDocument6 pages5TH Week EnergyMira VeranoNo ratings yet
- VFD E ManualDocument271 pagesVFD E Manualmathankumar1980100% (1)
- DC Components Co., LTD.: 1.5KE6.8 Thru 1.5KE440CADocument5 pagesDC Components Co., LTD.: 1.5KE6.8 Thru 1.5KE440CACarlos Sergio Costa CostaNo ratings yet
- Module 2 Science Grade 7Document18 pagesModule 2 Science Grade 7mabelsaguiped80% (15)
- Fluids MT1 RevDocument3 pagesFluids MT1 RevbmfranzNo ratings yet
- The OscilloscopeDocument6 pagesThe OscilloscoperiverajluizNo ratings yet
- Simulation and Implementation of DVR For Voltage Sag CompensationDocument5 pagesSimulation and Implementation of DVR For Voltage Sag Compensationjcrodriguez83No ratings yet
- Vibrations from Construction TrafficDocument9 pagesVibrations from Construction TrafficluismcmcNo ratings yet