You might also like
- DA SegmentationDocument20 pagesDA Segmentationসাঁচিপাট অসমNo ratings yet
- A I W 16 16 W: T I R S: N Mage Is Orth X Ords Ransformers For Mage Ecognition at CaleDocument22 pagesA I W 16 16 W: T I R S: N Mage Is Orth X Ords Ransformers For Mage Ecognition at Calebruce wangNo ratings yet
- Learning To Combine: Knowledge Aggregation For Multi-Source Domain AdaptationDocument19 pagesLearning To Combine: Knowledge Aggregation For Multi-Source Domain AdaptationasdasdNo ratings yet
- Rethinking Attention With PerformersDocument38 pagesRethinking Attention With PerformersAdeya MisuNo ratings yet
- Chen 22 RDocument21 pagesChen 22 RSicong CaoNo ratings yet
- Choromanski 2020Document36 pagesChoromanski 2020Victor Flores BenitesNo ratings yet
- Vi TransformerDocument21 pagesVi TransformerAli HaiderNo ratings yet
- A Generalization of Transformer Networks To GraphsDocument8 pagesA Generalization of Transformer Networks To GraphsAnh Vuong TuanNo ratings yet
- Art. 16Document12 pagesArt. 16juanjosemoracarrascal2No ratings yet
- Semantic-Guided Selective Representation For ImageDocument10 pagesSemantic-Guided Selective Representation For ImageTomislav IvandicNo ratings yet
- W S - F D A M L N L: HEN Ource REE Omain Daptation Eets Earning With Oisy AbelsDocument33 pagesW S - F D A M L N L: HEN Ource REE Omain Daptation Eets Earning With Oisy AbelsJackoNo ratings yet
- D W: A V D M A S: IFF AVE Ersatile Iffusion Odel For Udio YnthesisDocument17 pagesD W: A V D M A S: IFF AVE Ersatile Iffusion Odel For Udio Ynthesispeter panNo ratings yet
- Diffusion Based Representation LearningDocument20 pagesDiffusion Based Representation Learningmarkus.aureliusNo ratings yet
- Classifier-Constrained Deep Adversarial Domain Adaptation For Cross-Domain Semisupervised Classification in Remote Sensing ImagesDocument5 pagesClassifier-Constrained Deep Adversarial Domain Adaptation For Cross-Domain Semisupervised Classification in Remote Sensing ImagesKoushik DurgapuNo ratings yet
- LRM: L R M S I 3D: Arge Econstruction Odel For Ingle Mage ToDocument23 pagesLRM: L R M S I 3D: Arge Econstruction Odel For Ingle Mage Tocaxidas953No ratings yet
- Hyena Hierarchy Towards Larger Convolutional Language Models PDFDocument38 pagesHyena Hierarchy Towards Larger Convolutional Language Models PDFalfonsobozatucklerNo ratings yet
- Learning in Latent Spaces Improves The Predictive Accuracy of Deep Neural OperatorsDocument22 pagesLearning in Latent Spaces Improves The Predictive Accuracy of Deep Neural Operatorsdata scienceNo ratings yet
- Tacl A 00544Document23 pagesTacl A 00544Brent BaumgartnerNo ratings yet
- Featup - A Model-Agnostic Framework For Features at Any ResolutionDocument27 pagesFeatup - A Model-Agnostic Framework For Features at Any Resolutionbicim22808No ratings yet
- DDGANDocument28 pagesDDGANPixel DinosaurNo ratings yet
- And The Bit Goes DownDocument11 pagesAnd The Bit Goes Downgireesh123123No ratings yet
- Art 2Document16 pagesArt 2pedroNo ratings yet
- 2021 Arxiv - TransGAN Two Transformers Can Make One Strong GANDocument13 pages2021 Arxiv - TransGAN Two Transformers Can Make One Strong GANFengShiNo ratings yet
- Federated LearningDocument15 pagesFederated LearningMichelle LeiNo ratings yet
- SauvolaNet Learning Adaptive Sauvola Network For Degraded Document Binarization PDFDocument15 pagesSauvolaNet Learning Adaptive Sauvola Network For Degraded Document Binarization PDFbroNo ratings yet
- Compositional Semantic Parsing With Large Language ModelsDocument59 pagesCompositional Semantic Parsing With Large Language ModelsNilay JainNo ratings yet
- Scaling Down To Scale Up: A Guide To Parameter-Efficient Fine-TuningDocument21 pagesScaling Down To Scale Up: A Guide To Parameter-Efficient Fine-TuningChrisHaldenNo ratings yet
- 16274-Article Text-19768-1-2-20210518Document9 pages16274-Article Text-19768-1-2-20210518Nabila Risqi RosyadiNo ratings yet
- A Weighted Partial Domain Adaptation For Acoustic Scene Classification and Its Application in Fiber Optic Security SystemDocument7 pagesA Weighted Partial Domain Adaptation For Acoustic Scene Classification and Its Application in Fiber Optic Security Systemamta1No ratings yet
- KazheenDocument15 pagesKazheenKhairul IchsanNo ratings yet
- 1 s2.0 S131915782300099X MainDocument13 pages1 s2.0 S131915782300099X MainYahidNo ratings yet
- DATE: Detecting Anomalies in Text Via Self-Supervision of TransformersDocument11 pagesDATE: Detecting Anomalies in Text Via Self-Supervision of TransformersAyman TaniraNo ratings yet
- Large Language Models Meet NL2Code A SurveyDocument22 pagesLarge Language Models Meet NL2Code A Surveydeepak2083No ratings yet
- A Multisource Domain Adaptation Network For Process Fault Diagnosis Under Different Working ConditionsDocument12 pagesA Multisource Domain Adaptation Network For Process Fault Diagnosis Under Different Working ConditionsHemanth KumarNo ratings yet
- TabTransformer - Tabular Data Modeling Using Contextual EmbeddingsDocument17 pagesTabTransformer - Tabular Data Modeling Using Contextual EmbeddingsThiago Moura BastosNo ratings yet
- Visual Analytics For TransformersDocument10 pagesVisual Analytics For TransformersJorge CasajusNo ratings yet
- Is Space-Time Attention All You Need For Video Understanding?Document13 pagesIs Space-Time Attention All You Need For Video Understanding?Loc DoNo ratings yet
- Dynamic Fusion Network For Multi-Domain End-To-End Task-Oriented DialogDocument11 pagesDynamic Fusion Network For Multi-Domain End-To-End Task-Oriented DialogMuhammad Fhadli SullivanNo ratings yet
- Transformer-Based Framework For Accurate Segmentation of High-Resolution Images in Structural Health MonitoringDocument15 pagesTransformer-Based Framework For Accurate Segmentation of High-Resolution Images in Structural Health MonitoringNegin GhaderiNo ratings yet
- Domain Information Control at Inference Time For Acoustic Scene ClassificationDocument5 pagesDomain Information Control at Inference Time For Acoustic Scene Classificationamta1No ratings yet
- 28682-Article Text-32736-1-2-20240324Document11 pages28682-Article Text-32736-1-2-20240324Jorge CasajusNo ratings yet
- 1 s2.0 S0893608022002234 MainDocument14 pages1 s2.0 S0893608022002234 MainChen JasonNo ratings yet
- S GNN R 3DM P P & B: Imple Egularisation For Olecular Roperty Rediction EyondDocument23 pagesS GNN R 3DM P P & B: Imple Egularisation For Olecular Roperty Rediction EyondYunyang LiNo ratings yet
- Andomized Utomatic Ifferentiation: Department of Computer Science Department of Astrophysical SciencesDocument19 pagesAndomized Utomatic Ifferentiation: Department of Computer Science Department of Astrophysical SciencesLon donNo ratings yet
- S C L P - L M F - : Upervised Ontrastive Earning For RE Trained Anguage Odel INE TuningDocument15 pagesS C L P - L M F - : Upervised Ontrastive Earning For RE Trained Anguage Odel INE TuningJexusNo ratings yet
- 1 s2.0 S199582262200019X MainDocument12 pages1 s2.0 S199582262200019X Mainirshad.datascienceNo ratings yet
- ASR - VLSP 2021: Conformer With Gradient Mask and Stochastic Weight Averaging For Vietnamese Automatic Speech RecognitionDocument7 pagesASR - VLSP 2021: Conformer With Gradient Mask and Stochastic Weight Averaging For Vietnamese Automatic Speech RecognitionRVNo ratings yet
- Survey and Systematization of 3D Object Detection Models and MethodsDocument32 pagesSurvey and Systematization of 3D Object Detection Models and MethodsGuilherme RochaNo ratings yet
- Global-Local Path Networks For Monocular Depth Estimation With Vertical CutdepthDocument11 pagesGlobal-Local Path Networks For Monocular Depth Estimation With Vertical Cutdepthus GPTNo ratings yet
- C N: B - A P H C A: HIP ET Udget Ware Runing With Eaviside Ontinuous PproximationsDocument18 pagesC N: B - A P H C A: HIP ET Udget Ware Runing With Eaviside Ontinuous Pproximations20je0434IshaanChaturvediNo ratings yet
- SegContrast 3D Point Cloud Feature Representation Learning Through Self-Supervised Segment DiscriminationDocument8 pagesSegContrast 3D Point Cloud Feature Representation Learning Through Self-Supervised Segment Discriminationmishraaryan846No ratings yet
- 1 s2.0 S0893608023005695 MainDocument14 pages1 s2.0 S0893608023005695 Mainhanumantha12No ratings yet
- Sign Language Recognition From Digital Videos Using Feature Pyramid Network With Detection TransformerDocument13 pagesSign Language Recognition From Digital Videos Using Feature Pyramid Network With Detection TransformerMiral ElnakibNo ratings yet
- DERA Enhancing Large Language Model CompletionsDocument38 pagesDERA Enhancing Large Language Model CompletionsnsansaturninoNo ratings yet
- A Primer On Design Aspects, Recent Advances, and Challenges inDocument29 pagesA Primer On Design Aspects, Recent Advances, and Challenges inMAwais QarniNo ratings yet
- Resource Allocation For D2D Communication Underlaid Cellular Networks Using Graph-Based ApproachDocument15 pagesResource Allocation For D2D Communication Underlaid Cellular Networks Using Graph-Based ApproachmahboobNo ratings yet
- SCIBER A Simple Method For Removing Batch EffectsDocument8 pagesSCIBER A Simple Method For Removing Batch EffectsNealNo ratings yet
- Geometric Latent Diffusion ModelDocument18 pagesGeometric Latent Diffusion ModelmartaNo ratings yet
- Ulti Modal Atent IffusionDocument40 pagesUlti Modal Atent IffusionpranaypromoNo ratings yet
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationFrom EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNo ratings yet
- N50-200H-CC Operation and Maintenance Manual 961220 Bytes 01Document94 pagesN50-200H-CC Operation and Maintenance Manual 961220 Bytes 01ANDRESNo ratings yet
- UntitledDocument13 pagesUntitledTestNo ratings yet
- Rubric For Aet570 BenchmarkDocument4 pagesRubric For Aet570 Benchmarkapi-255765082No ratings yet
- Ae - Centuries Before 1400 Are Listed As Browsable DirectoriesDocument3 pagesAe - Centuries Before 1400 Are Listed As Browsable DirectoriesPolNeimanNo ratings yet
- Sample Cross-Complaint For Indemnity For CaliforniaDocument4 pagesSample Cross-Complaint For Indemnity For CaliforniaStan Burman75% (8)
- Mitsubishi FanDocument2 pagesMitsubishi FanKyaw ZawNo ratings yet
- Lista de Precios Agosto 2022Document9 pagesLista de Precios Agosto 2022RuvigleidysDeLosSantosNo ratings yet
- List of Phrasal Verbs 1 ColumnDocument12 pagesList of Phrasal Verbs 1 ColumnmoiibdNo ratings yet
- OVDT Vs CRT - GeneralDocument24 pagesOVDT Vs CRT - Generaljaiqc100% (1)
- Lateritic NickelDocument27 pagesLateritic NickelRAVI1972100% (2)
- Report On Marketing Strategy of Nestle MILKPAKDocument13 pagesReport On Marketing Strategy of Nestle MILKPAKAzeem Ahmad100% (1)
- BIOBASE Vortex Mixer MX-S - MX-F User ManualDocument10 pagesBIOBASE Vortex Mixer MX-S - MX-F User Manualsoporte03No ratings yet
- N2 V Operare ManualDocument370 pagesN2 V Operare Manualramiro0001No ratings yet
- 2 AcknowledgementDocument8 pages2 AcknowledgementPadil KonamiNo ratings yet
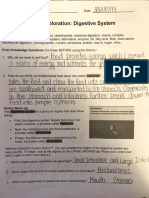
- Student Exploration: Digestive System: Food Inio Simple Nutrien/oDocument9 pagesStudent Exploration: Digestive System: Food Inio Simple Nutrien/oAshantiNo ratings yet
- Villamaria JR Vs CADocument2 pagesVillamaria JR Vs CAClarissa SawaliNo ratings yet
- Eng21 (Story of Hamguchi Gohei)Document9 pagesEng21 (Story of Hamguchi Gohei)Alapan NandaNo ratings yet
- Neelima A Kulkarni ResumeDocument3 pagesNeelima A Kulkarni ResumeAcademics LecturenotesNo ratings yet
- Electric Motor Cycle and ScooterDocument9 pagesElectric Motor Cycle and ScooterA A.DevanandhNo ratings yet
- Suspend and Resume Calls: Exit PlugDocument4 pagesSuspend and Resume Calls: Exit PlugrajuNo ratings yet
- CDR Writing: Components of The CDRDocument5 pagesCDR Writing: Components of The CDRindikuma100% (3)
- Alpha Sexual Power Vol 1Document95 pagesAlpha Sexual Power Vol 1Joel Lopez100% (1)
- Dialog+ SW9xx - SM - Chapter 7 - 2-2013 - EN - Rinsing Bridge Version 5Document1 pageDialog+ SW9xx - SM - Chapter 7 - 2-2013 - EN - Rinsing Bridge Version 5Al ImranNo ratings yet
- Building A Pentesting Lab For Wireless Networks - Sample ChapterDocument29 pagesBuilding A Pentesting Lab For Wireless Networks - Sample ChapterPackt PublishingNo ratings yet
- Zahid Imran CVDocument4 pagesZahid Imran CVDhia Hadj SassiNo ratings yet
- Will Smith BiographyDocument11 pagesWill Smith Biographyjhonatan100% (1)
- The Minimum Means of Reprisal - China's S - Jeffrey G. LewisDocument283 pagesThe Minimum Means of Reprisal - China's S - Jeffrey G. LewisrondfauxNo ratings yet
- MECANISMOS de Metais de TransicaoDocument36 pagesMECANISMOS de Metais de TransicaoJoão BarbosaNo ratings yet
- Test Bank For Macroeconomics For Life Smart Choices For All2nd Edition Avi J Cohen DownloadDocument74 pagesTest Bank For Macroeconomics For Life Smart Choices For All2nd Edition Avi J Cohen Downloadmichaelmarshallmiwqxteyjb100% (28)