You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Components of System UnitDocument8 pagesComponents of System UnitIvan Louie Cruto100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Actividades PreescolarDocument13 pagesActividades PreescolarJosé Alfredo Martinez100% (1)
- Chapitre 2 Introduction Sur Les MicrocontroleursDocument15 pagesChapitre 2 Introduction Sur Les MicrocontroleursMedNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- 100 Circuitos de Potencia con SCRs y TriacsFrom Everand100 Circuitos de Potencia con SCRs y TriacsRating: 3 out of 5 stars3/5 (5)
- Proyectos de instalaciones eléctrica de baja tensiónFrom EverandProyectos de instalaciones eléctrica de baja tensiónRating: 5 out of 5 stars5/5 (1)
- Resumão de Informática para Concurso Do Banco Do BrasilDocument9 pagesResumão de Informática para Concurso Do Banco Do Brasildreamman123No ratings yet
- CU00302A Indice Curso Basico Programacion Visual Basic Desde CeroDocument5 pagesCU00302A Indice Curso Basico Programacion Visual Basic Desde CeroJohn RiverosNo ratings yet
- Administración de servicios web: Anatomía del internetFrom EverandAdministración de servicios web: Anatomía del internetNo ratings yet
- Iniciación al diseño de circuitos impresos con Altium DesignerFrom EverandIniciación al diseño de circuitos impresos con Altium DesignerNo ratings yet
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaNo ratings yet
- UF0852 - Instalación y actualización de sistemas operativosFrom EverandUF0852 - Instalación y actualización de sistemas operativosRating: 5 out of 5 stars5/5 (1)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeFrom EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo ratings yet
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorNo ratings yet
- Metodología básica de instrumentación industrial y electrónicaFrom EverandMetodología básica de instrumentación industrial y electrónicaRating: 4 out of 5 stars4/5 (12)
- Utilización de las bases de datos relacionales en el sistema de gestión y almacenamiento de datos. ADGG0308From EverandUtilización de las bases de datos relacionales en el sistema de gestión y almacenamiento de datos. ADGG0308No ratings yet
- UF1863 - Instalación y configuración de dispositivos y servicios de conectividad asociadosFrom EverandUF1863 - Instalación y configuración de dispositivos y servicios de conectividad asociadosNo ratings yet
- UF1866 - Instalación y configuración de servicios en equipos de telefoníaFrom EverandUF1866 - Instalación y configuración de servicios en equipos de telefoníaNo ratings yet
- Unix Programacion Avanzada, 3ª edicion.: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREFrom EverandUnix Programacion Avanzada, 3ª edicion.: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARERating: 3.5 out of 5 stars3.5/5 (3)
- Instalación y configuración de periféricos microinformáticos. IFCT0309From EverandInstalación y configuración de periféricos microinformáticos. IFCT0309No ratings yet
- UF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosFrom EverandUF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosRating: 5 out of 5 stars5/5 (1)
- Montaje de redes eléctricas aéreas de alta tensión. ELEE0209From EverandMontaje de redes eléctricas aéreas de alta tensión. ELEE0209Rating: 4.5 out of 5 stars4.5/5 (2)
- Consolidado Examen SODocument99 pagesConsolidado Examen SOADRIANA MICHELLE CAMPOVERDE BALCAZARNo ratings yet
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Transformador De Estado Sólido: Revolucionando la red eléctrica para la calidad de la energía y la eficiencia energéticaFrom EverandTransformador De Estado Sólido: Revolucionando la red eléctrica para la calidad de la energía y la eficiencia energéticaNo ratings yet
- Testeo y verificación de equipos y periféricos microinformáticos. IFCT0108From EverandTesteo y verificación de equipos y periféricos microinformáticos. IFCT0108No ratings yet
- UF0512 - Transmisión de información por medios convencionales e informáticosFrom EverandUF0512 - Transmisión de información por medios convencionales e informáticosNo ratings yet
- Curso de Electrónica - Electrónica BásicaFrom EverandCurso de Electrónica - Electrónica BásicaRating: 4 out of 5 stars4/5 (12)
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasNo ratings yet
- Fundamentos de Redes InformáticasFrom EverandFundamentos de Redes InformáticasRating: 4.5 out of 5 stars4.5/5 (9)
- Fundamentos de Redes Informáticas - 2ª EdiciónFrom EverandFundamentos de Redes Informáticas - 2ª EdiciónRating: 3 out of 5 stars3/5 (2)
- Desarrollo del proyecto de la red telemática. IFCT0410From EverandDesarrollo del proyecto de la red telemática. IFCT0410No ratings yet
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- Inspección óptica automatizada: Avances en la tecnología de visión por computadoraFrom EverandInspección óptica automatizada: Avances en la tecnología de visión por computadoraNo ratings yet
- Computación Física: Explorando la visión por computadora en la computación físicaFrom EverandComputación Física: Explorando la visión por computadora en la computación físicaNo ratings yet
- Sistemas Operativos: Implantación de Sistemas Operativos (CFGS ASIR)From EverandSistemas Operativos: Implantación de Sistemas Operativos (CFGS ASIR)No ratings yet
- Montaje de sistemas telefónicos con centralitas de baja capacidad. ELES0209From EverandMontaje de sistemas telefónicos con centralitas de baja capacidad. ELES0209No ratings yet
- Montaje de infraestructuras de redes locales de datos. ELES0209From EverandMontaje de infraestructuras de redes locales de datos. ELES0209No ratings yet
- Teoria Llenguatge MaquinaDocument86 pagesTeoria Llenguatge Maquinaandersagasti12No ratings yet
- Woz On Integer BASICDocument3 pagesWoz On Integer BASICMoe B. Us100% (2)
- Especificações Do AMD Ryzen 5 5500 Banco de Dados de CPU TechPowerUpDocument3 pagesEspecificações Do AMD Ryzen 5 5500 Banco de Dados de CPU TechPowerUpPaulo Rogério ChiarariaNo ratings yet
- Introduction To Program Logic FormulationDocument39 pagesIntroduction To Program Logic FormulationArjay BalberanNo ratings yet
- Storage MediaDocument17 pagesStorage Mediaparassuri007100% (1)
- Lab Report 1Document8 pagesLab Report 1JannenNo ratings yet
- Sistema Operativos v3Document15 pagesSistema Operativos v3ToomuchbassNo ratings yet
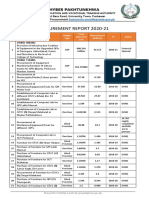
- Procurement Report KP Tevta 1Document3 pagesProcurement Report KP Tevta 1Muhammad AsgharNo ratings yet
- Soluciones DellDocument16 pagesSoluciones DellmkprettNo ratings yet
- Информатика и программирование теория и практикаDocument284 pagesИнформатика и программирование теория и практикаАдиляNo ratings yet
- Soc Stands For System On A Chip. This Is A Chip/Integrated Circuit That Holds ManyDocument10 pagesSoc Stands For System On A Chip. This Is A Chip/Integrated Circuit That Holds ManyBonay BalotNo ratings yet
- 1.) Explain Any 5 Important Features of Operating System.: A) They Have A Work ManagementDocument24 pages1.) Explain Any 5 Important Features of Operating System.: A) They Have A Work ManagementAmisha SainiNo ratings yet
- Altirra Keyboard ReferenceDocument2 pagesAltirra Keyboard ReferenceSteve Attwood100% (2)
- Service Manual: Ecosys FS-1750 Ecosys FS-3750Document222 pagesService Manual: Ecosys FS-1750 Ecosys FS-3750Ali OuchnNo ratings yet
- ADA1 B1 InformaticaDocument10 pagesADA1 B1 InformaticaFer Canto TorresNo ratings yet
- Felcom 15 FolletoDocument2 pagesFelcom 15 FolletoPatricia Gonzalez MansoNo ratings yet
- 3 Pupitre Kbd-DigitalDocument4 pages3 Pupitre Kbd-DigitalMatthias CunhaNo ratings yet
- Evolución Del Sistema Operativo WindowsDocument24 pagesEvolución Del Sistema Operativo WindowsRudy Mario Quiroga Velasco100% (1)
- Manuale Utente Lettore Mp3Document24 pagesManuale Utente Lettore Mp3abramjs100% (1)
- Como Recargar Un Cartucho Canon PGDocument8 pagesComo Recargar Un Cartucho Canon PGIlton FahningNo ratings yet
- CEG 2136 - Fall 2005 - FinalDocument12 pagesCEG 2136 - Fall 2005 - FinalAmin DhouibNo ratings yet
- A Group of Wire Between Two Part of Hardware: There Are Three Main Bus GroupsDocument22 pagesA Group of Wire Between Two Part of Hardware: There Are Three Main Bus GroupsGantulga PurevdorjNo ratings yet
- Evaluacion Diagnostica PDFDocument2 pagesEvaluacion Diagnostica PDFFernado Flores21No ratings yet
- Rapsberry Pi - Luna Alama MichelleDocument6 pagesRapsberry Pi - Luna Alama MichelleMichelle YunorviNo ratings yet