You might also like
- 強制渦流實驗Document6 pages強制渦流實驗tsaipeterNo ratings yet
- 沉澱池原理及操作Document35 pages沉澱池原理及操作billNo ratings yet
- 波流共同作用下大直径圆柱局部冲刷试验研究 程永舟Document11 pages波流共同作用下大直径圆柱局部冲刷试验研究 程永舟zhoushengtjuNo ratings yet
- 中年教师心理健康的现状与对策研究Document2 pages中年教师心理健康的现状与对策研究Sam Chi ChiNo ratings yet
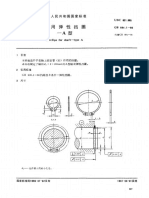
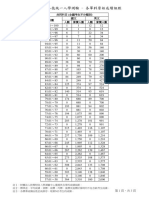
- GB893 1-1986Document5 pagesGB893 1-1986ottoNo ratings yet
- LAMPIRAN 4 Penelitian LitDipa2021Document5 pagesLAMPIRAN 4 Penelitian LitDipa2021subamiaNo ratings yet
- EXP010 熱力學Document10 pagesEXP010 熱力學QianNo ratings yet
- GB93 1987Document3 pagesGB93 1987ottoNo ratings yet
- GB74 1985Document3 pagesGB74 1985ottoNo ratings yet
- GB859 1987Document3 pagesGB859 1987ottoNo ratings yet
- GB71 1985Document3 pagesGB71 1985ottoNo ratings yet
- 實驗十二、阿斯匹靈Document10 pages實驗十二、阿斯匹靈金莎No ratings yet
- KR20Document2 pagesKR20Mortejo Mary Mae E.No ratings yet
- KR20Document2 pagesKR20marymae.mortejoNo ratings yet
- 臺北市近10年收支簡表Document1 page臺北市近10年收支簡表余秉燁No ratings yet
- Deity Men (Asian Highlands Perspectives. Vol 3)Document277 pagesDeity Men (Asian Highlands Perspectives. Vol 3)koknor100% (1)
- 轉動慣量Document9 pages轉動慣量趙方慈No ratings yet
- ГОСТ 隧道上部结构的施工Document21 pagesГОСТ 隧道上部结构的施工刘堂正No ratings yet
- 實驗十一、磷酸Document11 pages實驗十一、磷酸金莎No ratings yet
- 55Document1 page55YasserArafaNo ratings yet
- 舱容计算书Document20 pages舱容计算书Rhomadon HsNo ratings yet
- SPSS教學 生存曲線Document5 pagesSPSS教學 生存曲線洪侊增No ratings yet
- AttachmentDocument27 pagesAttachmentamr elzeinyNo ratings yet
- Civ253 Clase 03072020 08062022Document10 pagesCiv253 Clase 03072020 08062022Rodrigo Adhemar Medrano CrispinNo ratings yet
- أدنى معدلات القبول تنافسيا2019Document2 pagesأدنى معدلات القبول تنافسيا2019عبدالله العمايرهNo ratings yet
- AWA5633A型声级计Document15 pagesAWA5633A型声级计ind WNo ratings yet
- 五相十拍步进电动机控制程序设计与调试Document29 pages五相十拍步进电动机控制程序设计与调试shubowen64No ratings yet
- EXP05 轉動Document13 pagesEXP05 轉動QianNo ratings yet
- Teori Tes KlasikDocument42 pagesTeori Tes KlasiktamharNo ratings yet
- 240 متر مكعبDocument9 pages240 متر مكعبaltrawnhwsam9No ratings yet
- 车间生产排期表Document4 pages车间生产排期表tian.zhenyaNo ratings yet
- 车间生产排期表Document4 pages车间生产排期表yewai123456789No ratings yet
- 化學報告Document7 pages化學報告S11030269楊昀諺No ratings yet
- 30 - Conversion Table of HardnessDocument1 page30 - Conversion Table of HardnessWanasisYenantaNo ratings yet
- 先天八卦到后天八卦的幻方推演 孙利Document3 pages先天八卦到后天八卦的幻方推演 孙利syouemonsakamotoNo ratings yet
- GB894 1-1986Document10 pagesGB894 1-1986ottoNo ratings yet
- GB877 1986Document3 pagesGB877 1986ottoNo ratings yet
- 鸡蛋牛奶布丁在凝胶过程中的动态流变特性Document8 pages鸡蛋牛奶布丁在凝胶过程中的动态流变特性Lim Chen GinNo ratings yet
- Quiz2 3 S Details UpdatedDocument75 pagesQuiz2 3 S Details Updatedomar.mostafa02No ratings yet
- 第12讲Document41 pages第12讲hlz2938053113No ratings yet
- 108 2y Grade 00Document3 pages108 2y Grade 00何鎮宇No ratings yet
- Data 2Document3 pagesData 2Richlan BalingitNo ratings yet
- 2309Document1 page2309Vladan PrigaraNo ratings yet
- 實驗數據Document2 pages實驗數據AngelNo ratings yet
- 106年花蓮區實驗試題Document9 pages106年花蓮區實驗試題謝濟遠No ratings yet
- 2Document1 page2mahmoud.kassab75No ratings yet
- R05543062 林宗佑 Air jetDocument20 pagesR05543062 林宗佑 Air jet林宗佑No ratings yet
- BY系列液力变速器参数表及外形图2006版Document24 pagesBY系列液力变速器参数表及外形图2006版chtoil2020No ratings yet
- Solahudin Uas StatistikaDocument13 pagesSolahudin Uas Statistikarozaqqabdul22No ratings yet
- KinematikaDocument3 pagesKinematikaJakob FurlanNo ratings yet
- 4-2 公共工程飛灰混凝土使用手冊Document64 pages4-2 公共工程飛灰混凝土使用手冊sh10150607No ratings yet
- Conversion Table of HardnessDocument1 pageConversion Table of HardnessBình NguyễnNo ratings yet
- Derrateo Motores WeichaiDocument4 pagesDerrateo Motores WeichaiComercial 1No ratings yet
- Приклад виконання 4Document8 pagesПриклад виконання 4fateevapolina049No ratings yet
- 测量齿轮行业标准Document7 pages测量齿轮行业标准qi.lu3No ratings yet
- 測定液體的比熱波義耳定律Document10 pages測定液體的比熱波義耳定律extraian76No ratings yet
- Trajectory SimulationDocument8 pagesTrajectory Simulationali_raza117No ratings yet
- 轉動慣量與陀螺進動角速度的測量 202209Document7 pages轉動慣量與陀螺進動角速度的測量 202209Alex LinNo ratings yet