You might also like
- Descriptive Geometry 1 Lecture NotesDocument63 pagesDescriptive Geometry 1 Lecture NotesGrigor Ciko100% (1)
- QTM - Soap Battle CaseDocument7 pagesQTM - Soap Battle CaseAshish Babaria100% (1)
- Stress Management PPT FinalDocument7 pagesStress Management PPT FinalAdarsh Meher100% (1)
- Direct Torque Control - Wikipedia PDFDocument6 pagesDirect Torque Control - Wikipedia PDFMohammad HaroonNo ratings yet
- G.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesDocument35 pagesG.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesAbhinav G. KhandekarNo ratings yet
- Direct Torque Control (DTC) Is One Method Used inDocument7 pagesDirect Torque Control (DTC) Is One Method Used inAnjana SudarsananNo ratings yet
- Direct Torque Control of Induction MotorDocument19 pagesDirect Torque Control of Induction MotormanoranjanottaNo ratings yet
- Direct Torque ControlDocument5 pagesDirect Torque Controlvineeth kumarNo ratings yet
- Flux WeakningDocument4 pagesFlux WeakningShivendraSaurabhNo ratings yet
- High Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationDocument9 pagesHigh Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationMefisto ElNo ratings yet
- Theory On Variable Frequency DriveDocument39 pagesTheory On Variable Frequency DriveKarthikMeenakshiSundaramNo ratings yet
- New Hybrid Fuzzy Controller For Direct Torque Control Induction Motor DrivesDocument9 pagesNew Hybrid Fuzzy Controller For Direct Torque Control Induction Motor DrivesBook4AllNo ratings yet
- Robot Actuators and Feedback Components (Main7)Document82 pagesRobot Actuators and Feedback Components (Main7)tarasasanka33% (6)
- Stepper Motor Basics: Applicationnote001Document13 pagesStepper Motor Basics: Applicationnote001shark seas100% (1)
- Notes 1Document39 pagesNotes 1angayarkanni.sundaraNo ratings yet
- EFC3610 KatalogDocument8 pagesEFC3610 Kataloglazar.bulovanNo ratings yet
- Implementation of Ac Induction Motor Control Using Constant V/HZ Principle and Sine Wave PWM Technique WITH TMS320F28027Document7 pagesImplementation of Ac Induction Motor Control Using Constant V/HZ Principle and Sine Wave PWM Technique WITH TMS320F28027edi ediNo ratings yet
- Direct Torque ControlDocument4 pagesDirect Torque Controlsf111No ratings yet
- HV10 Serisi Klavuz V5.0Document67 pagesHV10 Serisi Klavuz V5.0daniel hughesNo ratings yet
- An001 enDocument13 pagesAn001 enQuynh NguyenNo ratings yet
- AC Drives: Need For Electric Drive VFD VFD As Energy Saver Control TechniquesDocument31 pagesAC Drives: Need For Electric Drive VFD VFD As Energy Saver Control TechniquesAnonymous FKMfvCbNo ratings yet
- Brushless ControlDocument10 pagesBrushless ControlEmanuel SalesNo ratings yet
- RMO-TD Series: Tap Changer Analyzer & Winding OhmmeterDocument6 pagesRMO-TD Series: Tap Changer Analyzer & Winding OhmmeterSelk CLNo ratings yet
- DSP Controlled Inverter FedDocument16 pagesDSP Controlled Inverter FedARVINDNo ratings yet
- Performance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller BandwidthDocument10 pagesPerformance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller Bandwidthaswardi8756No ratings yet
- Manual Completo HV10Document68 pagesManual Completo HV10geraldalara209No ratings yet
- System of ExcitationDocument20 pagesSystem of ExcitationWesley RibeiroNo ratings yet
- The Switching Table by A Fuzzy System. in This Case, Two Approaches CanDocument2 pagesThe Switching Table by A Fuzzy System. in This Case, Two Approaches CanUtpal MahitchaNo ratings yet
- Chapter 1Document10 pagesChapter 1eman71No ratings yet
- Digital Signal Control BasedDocument10 pagesDigital Signal Control BasedFaisal IlyasNo ratings yet
- CV800 Series User Manual 16 Pages V1.5Document16 pagesCV800 Series User Manual 16 Pages V1.5Shafiqur RasulNo ratings yet
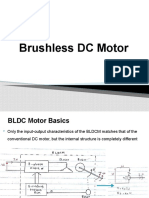
- Brushless DC MotorDocument24 pagesBrushless DC MotorNadeeka PereraNo ratings yet
- M 5625 SP PDFDocument18 pagesM 5625 SP PDFFranz Erwin Gabriel FuentesNo ratings yet
- of BLDCDocument45 pagesof BLDCsmhbNo ratings yet
- Sensorless Field-Oriented Control For Double-Inverter-Fed Wound-Rotor Induction Motor DriveDocument8 pagesSensorless Field-Oriented Control For Double-Inverter-Fed Wound-Rotor Induction Motor DriveSM, Punchaccc WBSEDCL, PUNCHANo ratings yet
- Direct Torque Control of Induction MotorDocument37 pagesDirect Torque Control of Induction Motorpuria_rishabhNo ratings yet
- PDF p609845 enDocument11 pagesPDF p609845 enLucas Vinícius CostaNo ratings yet
- BLDCDocument45 pagesBLDCthulasi_krishna75% (4)
- Difference Between DTC and Scalar Mode PDFDocument6 pagesDifference Between DTC and Scalar Mode PDFVitali LursmanashviliNo ratings yet
- Direct Torque and Frequency Control of Double-Inverter-Fed Slip-Ring Induction Motor DriveDocument9 pagesDirect Torque and Frequency Control of Double-Inverter-Fed Slip-Ring Induction Motor DriveMahmoud ElsayedNo ratings yet
- Sine Inverter Controller With 8 Bit MicrocontrollerDocument8 pagesSine Inverter Controller With 8 Bit MicrocontrollerBillGNo ratings yet
- PS4500 BrochureDocument4 pagesPS4500 BrochureLord ApophisNo ratings yet
- AC DriveDocument165 pagesAC Drivesisar100% (2)
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- AED Notes SECTION CDocument8 pagesAED Notes SECTION CShivam RaiNo ratings yet
- NZ200 Manual 16003哪吒机Document38 pagesNZ200 Manual 16003哪吒机Daniel100% (3)
- Ingedrive Lv200 EngDocument2 pagesIngedrive Lv200 EnginakigarateNo ratings yet
- Abb Fast Switching Apfc RelayDocument2 pagesAbb Fast Switching Apfc RelayParashar PathakNo ratings yet
- Site Special Issue File Path1498478552-Jit-084Document4 pagesSite Special Issue File Path1498478552-Jit-084Bala RajuNo ratings yet
- Im 5 PDFDocument9 pagesIm 5 PDFmaheswaranNo ratings yet
- KSQ304E2: Automatic Co-Generation Management SystemDocument2 pagesKSQ304E2: Automatic Co-Generation Management SystemRN NNo ratings yet
- Direct Torque ControlDocument4 pagesDirect Torque Controlsanthurupesh0% (1)
- Design and Implementation of Flux Vector PDFDocument15 pagesDesign and Implementation of Flux Vector PDFBelal AshrafNo ratings yet
- Direct Torque Control of Induction MotorDocument19 pagesDirect Torque Control of Induction MotorKumail Hasan NaqviNo ratings yet
- SG200 Series Single Phase Solar Inverter User ManualDocument16 pagesSG200 Series Single Phase Solar Inverter User Manualclifford100% (2)
- RDLorenz Optim 2008Document9 pagesRDLorenz Optim 2008Olimpiu StoicutaNo ratings yet
- (Article) DTC CONTROL BASED ARTIFICIAL NEURAL NETWORK FOR HIGH PERFORMANCE PMSM DRIVEDocument12 pages(Article) DTC CONTROL BASED ARTIFICIAL NEURAL NETWORK FOR HIGH PERFORMANCE PMSM DRIVEFarouk ChellaliNo ratings yet
- Databook / Service Manual: X-POWER Full DC Inverter Outdoor Unit 208 230VDocument170 pagesDatabook / Service Manual: X-POWER Full DC Inverter Outdoor Unit 208 230VLenin de la HozNo ratings yet
- New DTC Control Scheme For Induction Motors Fed With A Three-Level InverterDocument9 pagesNew DTC Control Scheme For Induction Motors Fed With A Three-Level InverterANKIT PRAJAPATINo ratings yet
- RDE 710 Rotating Electrode: Redefining Electrochemical MeasurementDocument2 pagesRDE 710 Rotating Electrode: Redefining Electrochemical MeasurementgustavoNo ratings yet
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDocument17 pagesSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Rou Arit Sus EnerDocument6 pagesRou Arit Sus EnerNAENWI YAABARINo ratings yet
- Introduction To Uav SystemsDocument25 pagesIntroduction To Uav SystemsNAENWI YAABARINo ratings yet
- Modrn Cont IMDocument25 pagesModrn Cont IMNAENWI YAABARINo ratings yet
- Influc Rewb Sorc PaperDocument1 pageInfluc Rewb Sorc PaperNAENWI YAABARINo ratings yet
- New DTC WRKDocument8 pagesNew DTC WRKNAENWI YAABARINo ratings yet
- Graph Based UavDocument6 pagesGraph Based UavNAENWI YAABARINo ratings yet
- Flight Path Planning of Multiple UAVs For RobustDocument6 pagesFlight Path Planning of Multiple UAVs For RobustNAENWI YAABARINo ratings yet
- Advances in Unmanned Aerial Vehicles TechnologiesDocument14 pagesAdvances in Unmanned Aerial Vehicles TechnologiesNAENWI YAABARINo ratings yet
- Effic Path PlnnninDocument14 pagesEffic Path PlnnninNAENWI YAABARINo ratings yet
- D Star Algotm Uva PlannDocument5 pagesD Star Algotm Uva PlannNAENWI YAABARINo ratings yet
- Automatic Path Planning and Control Design For AutonomousDocument6 pagesAutomatic Path Planning and Control Design For AutonomousNAENWI YAABARINo ratings yet
- A Clustering-Based Coverage Path Planning Method For Autonomous Heterogeneous UAVsDocument11 pagesA Clustering-Based Coverage Path Planning Method For Autonomous Heterogeneous UAVsNAENWI YAABARINo ratings yet
- Comparison of Parallel Genetic Algorithm andDocument10 pagesComparison of Parallel Genetic Algorithm andNAENWI YAABARINo ratings yet
- Generalized Modeling Model of Three Phase Induction Motor: Ms. Tripti Rai Prof. Prashant DebreDocument5 pagesGeneralized Modeling Model of Three Phase Induction Motor: Ms. Tripti Rai Prof. Prashant DebreNAENWI YAABARINo ratings yet
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDocument6 pagesDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailNo ratings yet
- 230 Power System Stability PDFDocument31 pages230 Power System Stability PDFBelayneh TadesseNo ratings yet
- MIT4 105F12 Ex1-Desgeo PDFDocument21 pagesMIT4 105F12 Ex1-Desgeo PDFKhairy ElsayedNo ratings yet
- Technical Drawing Syllabus PDFDocument44 pagesTechnical Drawing Syllabus PDFNAENWI YAABARINo ratings yet
- MIT4 105F12 Ex1-Desgeo PDFDocument21 pagesMIT4 105F12 Ex1-Desgeo PDFKhairy ElsayedNo ratings yet
- Technical Drawing Syllabus PDFDocument44 pagesTechnical Drawing Syllabus PDFNAENWI YAABARINo ratings yet
- I Unit CurvesDocument40 pagesI Unit CurvesMithilesh VermaNo ratings yet
- First Aid 2011Document83 pagesFirst Aid 2011jaysonNo ratings yet
- EE6501 Power System Analysis12Document19 pagesEE6501 Power System Analysis12NAENWI YAABARINo ratings yet
- Symmetrical FaultsDocument9 pagesSymmetrical FaultsManish Kumar BhardwajNo ratings yet
- Cutting Fluids and Their FunctionDocument46 pagesCutting Fluids and Their FunctionNAENWI YAABARINo ratings yet
- National PDFDocument168 pagesNational PDFDINESH100% (1)
- Three-Axis Dynamic Modeling of Induction MotorDocument10 pagesThree-Axis Dynamic Modeling of Induction MotorRadu BabauNo ratings yet
- Principles of Electromechanical Energy ConversionDocument77 pagesPrinciples of Electromechanical Energy Conversionanil1216kumar50% (2)
- Vintage Tavern - PrintInspectionDocument4 pagesVintage Tavern - PrintInspectionBryce AirgoodNo ratings yet
- EQ Cheat SheetDocument7 pagesEQ Cheat SheetGabrielNo ratings yet
- Sotero 05activity EnvironmetnDocument3 pagesSotero 05activity Environmetnbernadette soteroNo ratings yet
- Solid Mens ModuleDocument158 pagesSolid Mens ModuleAzha Clarice VillanuevaNo ratings yet
- Art and Geography: Patterns in The HimalayaDocument30 pagesArt and Geography: Patterns in The HimalayaBen WilliamsNo ratings yet
- University of Engineering and Technology TaxilaDocument5 pagesUniversity of Engineering and Technology TaxilagndfgNo ratings yet
- Chinese ArchitectureDocument31 pagesChinese Architecturenusantara knowledge100% (2)
- Sew Gear ReducerDocument772 pagesSew Gear Reducerrahimi mohamadNo ratings yet
- Vol07 1 PDFDocument275 pagesVol07 1 PDFRurintana Nalendra WarnaNo ratings yet
- Schneider Modicon M580 CatalogueDocument268 pagesSchneider Modicon M580 CatalogueKhaerul Imam HermanNo ratings yet
- Feature Writing EnglishDocument2 pagesFeature Writing EnglishAldren BababooeyNo ratings yet
- Annual Report 2022-23 (Eng.)Document326 pagesAnnual Report 2022-23 (Eng.)Gaurav DurejaNo ratings yet
- Logistics Operation PlanningDocument25 pagesLogistics Operation PlanningLeonard AntoniusNo ratings yet
- TA1515VDocument4 pagesTA1515VLeo LeiNo ratings yet
- TC AdvisoryDocument1 pageTC AdvisoryJerome DelfinoNo ratings yet
- Scuba Diving - Technical Terms MK IDocument107 pagesScuba Diving - Technical Terms MK IJoachim MikkelsenNo ratings yet
- Total04 Digital Version PDFDocument52 pagesTotal04 Digital Version PDFbeatriz matos67% (3)
- Fatigue Consideration in DesignDocument3 pagesFatigue Consideration in DesigngouthamNo ratings yet
- Tank Gauging TankvisionDocument31 pagesTank Gauging Tankvisionkhangduongda3No ratings yet
- General Anaesthesia MCQsDocument5 pagesGeneral Anaesthesia MCQsWasi Khan100% (3)
- Deva Surya - 19MF02Document30 pagesDeva Surya - 19MF02SaravananNo ratings yet
- Fluid Solids Operations: High HighDocument20 pagesFluid Solids Operations: High HighPriscilaPrzNo ratings yet
- Chapter 2Document82 pagesChapter 2Kavitha Selvaraj50% (2)
- 1mrk513011-Ben en Auxiliary Current Transformer For Radss 1-Phase and 3-Phase Slce 12 Slce 16 Slxe 4Document4 pages1mrk513011-Ben en Auxiliary Current Transformer For Radss 1-Phase and 3-Phase Slce 12 Slce 16 Slxe 4GustavoForsterNo ratings yet
- Augocom Micro 768 Battery Tester User ManualDocument29 pagesAugocom Micro 768 Battery Tester User ManualJorge PontonNo ratings yet
- IFIS - Intraoperative Floppy Iris Syndrome Wa Wa 27-09-2008Document18 pagesIFIS - Intraoperative Floppy Iris Syndrome Wa Wa 27-09-2008JanuszNo ratings yet
- ONGC Buyout GOI's Entire 51.11% Stake in HPCLDocument4 pagesONGC Buyout GOI's Entire 51.11% Stake in HPCLArpan AroraNo ratings yet
- Assignment On Cholera: Submitted ToDocument17 pagesAssignment On Cholera: Submitted ToEhesanulHaqueSaifNo ratings yet