You might also like
- Low-Voltage Hydrogen Peroxide Electrolyzer For Highly Efficient - Power-To-Hydrogen ConversionDocument8 pagesLow-Voltage Hydrogen Peroxide Electrolyzer For Highly Efficient - Power-To-Hydrogen ConversionShangli HuangNo ratings yet
- Thapa 2021Document12 pagesThapa 2021136 SAMVID PARAJULINo ratings yet
- Nano Compo SisteDocument16 pagesNano Compo SisteEva AberaNo ratings yet
- Acs Iecr 1c01679Document27 pagesAcs Iecr 1c01679deepak ojhaNo ratings yet
- Direct Water Splitting Through Vibrating Piezoelectric Microfibers in WaterDocument6 pagesDirect Water Splitting Through Vibrating Piezoelectric Microfibers in Watervikash kushwahaNo ratings yet
- Integrated Techno-Economic Assessment of Large-Scale Green Hydrogen ProductionDocument6 pagesIntegrated Techno-Economic Assessment of Large-Scale Green Hydrogen ProductionAlvaro EstebanNo ratings yet
- Advanced Materials - 2019 - Zhang - Support and Interface Effects in Water Splitting ElectrocatalystsDocument19 pagesAdvanced Materials - 2019 - Zhang - Support and Interface Effects in Water Splitting Electrocatalystskangwei MaoNo ratings yet
- Design of A Simple and Cheap Water Electrolyser FoDocument7 pagesDesign of A Simple and Cheap Water Electrolyser Foعبدالرحمن المالكيNo ratings yet
- Nanostructured Hydrotreating Catalysts For Electrochemical Hydrogen Evolution.Document15 pagesNanostructured Hydrotreating Catalysts For Electrochemical Hydrogen Evolution.Shauvik BhattacharyaNo ratings yet
- Very Good Brief Review of Current SttausDocument6 pagesVery Good Brief Review of Current Sttauskhan47pkNo ratings yet
- Carbon Neutralization - 2022 - Lee - Anion Exchange Membrane Water Electrolysis For Sustainable Large Scale HydrogenDocument23 pagesCarbon Neutralization - 2022 - Lee - Anion Exchange Membrane Water Electrolysis For Sustainable Large Scale HydrogenBjorn FejerNo ratings yet
- Renewable and Sustainable Energy Reviews: SciencedirectDocument12 pagesRenewable and Sustainable Energy Reviews: SciencedirectManifa NoorNo ratings yet
- Advanced Two-Dimensional Materials For Green Hydrogen%Document34 pagesAdvanced Two-Dimensional Materials For Green Hydrogen%Mostafa Mahmoud ShehataNo ratings yet
- Developments and Future Prospects of Reverse Electrodialysis For SalinityDocument15 pagesDevelopments and Future Prospects of Reverse Electrodialysis For SalinityPaulina LizethNo ratings yet
- Sustainable Energy Technologies and AssessmentsDocument16 pagesSustainable Energy Technologies and AssessmentsMinh Pháp VũNo ratings yet
- 1 s2.0 S0360544221032576 MainDocument14 pages1 s2.0 S0360544221032576 Mainmd yousupNo ratings yet
- (2022) PEM - Desafios e Impactos en Costos - OjooDocument13 pages(2022) PEM - Desafios e Impactos en Costos - OjooLeivy GarciaNo ratings yet
- Perspective: Durability of Anion Exchange Membrane Water ElectrolyzersDocument27 pagesPerspective: Durability of Anion Exchange Membrane Water Electrolyzerskhan47pkNo ratings yet
- 1 s2.0 S0009250923001999 MainDocument9 pages1 s2.0 S0009250923001999 Main杨非凡No ratings yet
- Coupling Time - Sources Prod Green HydrogenDocument15 pagesCoupling Time - Sources Prod Green HydrogenAcácio CruzNo ratings yet
- Very Good Analysis On Losses Occuring During HER and OERDocument7 pagesVery Good Analysis On Losses Occuring During HER and OERkhan47pkNo ratings yet
- Life Cycle Assessment of Hydrogen Production and Consumption in An Isolated TerritoryDocument5 pagesLife Cycle Assessment of Hydrogen Production and Consumption in An Isolated TerritoryGabriel DiazNo ratings yet
- Solar DrivenDocument6 pagesSolar Drivenferonica chungNo ratings yet
- Renewable EnergyDocument8 pagesRenewable EnergyTam van TranNo ratings yet
- Hydrogen production by water electrolysis - A reviewDocument17 pagesHydrogen production by water electrolysis - A reviewYuneskyNo ratings yet
- Photocatalytic Water Splitting For Hydrogen ProductionDocument7 pagesPhotocatalytic Water Splitting For Hydrogen ProductionSiow HwaNo ratings yet
- Effect of Electrodes Separator-Type On Hydrogen Production Using Solar EnergyDocument9 pagesEffect of Electrodes Separator-Type On Hydrogen Production Using Solar EnergyJesús Javier Antuña CouceiroNo ratings yet
- Hydrogen Production From Water Electrolysis: Role of CatalystsDocument23 pagesHydrogen Production From Water Electrolysis: Role of CatalystsFreddy Negron HuamaniNo ratings yet
- 1 s2.0 S0013468612018890 MainDocument9 pages1 s2.0 S0013468612018890 MainThong NguyenNo ratings yet
- Niroula 2023 IOP Conf. Ser. Mater. Sci. Eng. 1279 012005Document14 pagesNiroula 2023 IOP Conf. Ser. Mater. Sci. Eng. 1279 012005محمد أشرفNo ratings yet
- Hydrogen Production From Water Electrolysis: Role of CatalystsDocument23 pagesHydrogen Production From Water Electrolysis: Role of CatalystsYoki YulizarNo ratings yet
- Artificial Photosynthesis For High-Value-Added Chemicals Old Material, New OpportunityDocument24 pagesArtificial Photosynthesis For High-Value-Added Chemicals Old Material, New OpportunityMariane AzevedoNo ratings yet
- HER at Large Current Density - ReviewDocument21 pagesHER at Large Current Density - ReviewCB Dong SuwonNo ratings yet
- Unbiased Solar Energy Storage: Photoelectrochemical Redox Ow BatteryDocument10 pagesUnbiased Solar Energy Storage: Photoelectrochemical Redox Ow BatteryAnonymous P7J7V4No ratings yet
- 2023 加拿大 中试CO2电解的半经验电解器模型Document9 pages2023 加拿大 中试CO2电解的半经验电解器模型Wenming LiNo ratings yet
- 1 s2.0 S245191032200165X MainDocument7 pages1 s2.0 S245191032200165X MainHarshithNo ratings yet
- 1 s2.0 S0360544222012440 MainDocument17 pages1 s2.0 S0360544222012440 MainZAIT AYALANo ratings yet
- Clean Energy Generation Using Capacitive Electrodes inDocument9 pagesClean Energy Generation Using Capacitive Electrodes inEduardo MacielNo ratings yet
- Acsnano2c06701 220919 155221Document12 pagesAcsnano2c06701 220919 155221Lee Jay aNo ratings yet
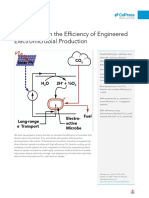
- Constraints On The Efficiency of Engineered ElectrDocument31 pagesConstraints On The Efficiency of Engineered ElectrIka D'YheaNo ratings yet
- Key Criteria For Next-Generation Dimensionally Stable Electrod %Document14 pagesKey Criteria For Next-Generation Dimensionally Stable Electrod %Mostafa Mahmoud ShehataNo ratings yet
- 1 s2.0 S0048969722062040 MainDocument12 pages1 s2.0 S0048969722062040 MainAlbanny PerezNo ratings yet
- Acsenergylett 2c02587Document8 pagesAcsenergylett 2c02587alhassanNo ratings yet
- Oriented Inter Growth AlkalineDocument12 pagesOriented Inter Growth AlkalinephilosophienNo ratings yet
- Poster SEBBAHIS - AMPSECA 2021Document1 pagePoster SEBBAHIS - AMPSECA 2021abdelali chakirNo ratings yet
- 1 s2.0 S2352152X21015589 MainDocument14 pages1 s2.0 S2352152X21015589 MainROBSON CardosoNo ratings yet
- Small Science - 2022 - LiDocument23 pagesSmall Science - 2022 - LiSyeda Ammara AnwarNo ratings yet
- Operation of Conventional and Unconventional Energy Sources To Drive A Reverse Osmosis Desalination Plant in Sinai Peninsula, EgyptDocument12 pagesOperation of Conventional and Unconventional Energy Sources To Drive A Reverse Osmosis Desalination Plant in Sinai Peninsula, EgyptMargareth Henao GilNo ratings yet
- Techno-Economic Analysis of HydrogenDocument18 pagesTechno-Economic Analysis of HydrogenEmmanuel100% (2)
- CrystEngComm, 2020, 22, 1500-1513 - Vacancy Engineering ReviewDocument14 pagesCrystEngComm, 2020, 22, 1500-1513 - Vacancy Engineering ReviewGracy TombocNo ratings yet
- Comparative Performance Analysis of Solar Powered Supercritical-Transcritical CO 2 Based Systems For Hydrogen Production and MultigenerationDocument18 pagesComparative Performance Analysis of Solar Powered Supercritical-Transcritical CO 2 Based Systems For Hydrogen Production and MultigenerationyasharNo ratings yet
- Energy: B. Yuzer, H. Selcuk, G. Chehade, M.E. Demir, I. DincerDocument9 pagesEnergy: B. Yuzer, H. Selcuk, G. Chehade, M.E. Demir, I. DincerDenilson SukerNo ratings yet
- Performance of Electrolyzer With Solar PoweredDocument15 pagesPerformance of Electrolyzer With Solar PoweredRandomV D.ENo ratings yet
- Advanced Science - 2016 - Li - One Dimensional Earth Abundant Nanomaterials For Water Splitting ElectrocatalystsDocument15 pagesAdvanced Science - 2016 - Li - One Dimensional Earth Abundant Nanomaterials For Water Splitting Electrocatalystskangwei MaoNo ratings yet
- Comparison of hydrogen production by alkaline water electrolysis and PEM electrolysisDocument6 pagesComparison of hydrogen production by alkaline water electrolysis and PEM electrolysisCiro LiraNo ratings yet
- Intrinsic Electric Fields in Two-Dimensional Materials Boost The Solar-to-Hydrogen E Ciency For Photocatalytic Water SplittingDocument6 pagesIntrinsic Electric Fields in Two-Dimensional Materials Boost The Solar-to-Hydrogen E Ciency For Photocatalytic Water SplittingKhaoula El AsameNo ratings yet
- Energy Science Engineering - 2022 - ChengDocument18 pagesEnergy Science Engineering - 2022 - ChengSyeda Ammara AnwarNo ratings yet
- Energies 15 03452Document20 pagesEnergies 15 03452Shreesha KumarNo ratings yet
- Colectores FotovoltaicosDocument27 pagesColectores FotovoltaicosClemen AlarconNo ratings yet
- Biohydrogen III: Renewable Energy System by Biological Solar Energy ConversionFrom EverandBiohydrogen III: Renewable Energy System by Biological Solar Energy ConversionNo ratings yet
- IEEE - Analytical Modeling and Control of Grid-ScaleDocument16 pagesIEEE - Analytical Modeling and Control of Grid-ScaleHumberto van OolNo ratings yet
- Energies 15 03452Document20 pagesEnergies 15 03452Shreesha KumarNo ratings yet
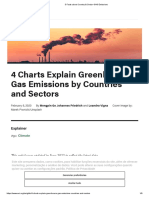
- WRI 2020 - GE - 4 Charts Explain Greenhouse Gas Emissions by Countries and SectorsDocument9 pagesWRI 2020 - GE - 4 Charts Explain Greenhouse Gas Emissions by Countries and SectorsHumberto van OolNo ratings yet
- I2V2 Average Current Control for Modular LED DriversDocument5 pagesI2V2 Average Current Control for Modular LED DriversHumberto van OolNo ratings yet
- Chen Chen Marquez Wang Chen Hwang IEEE VLSI Systems 2020Document10 pagesChen Chen Marquez Wang Chen Hwang IEEE VLSI Systems 2020Humberto van OolNo ratings yet
- Castro Vazquez Lamar Arias Hernando Sebastian IEEE Journal of Emerging and Selected Topics in Power Eletronics 2019Document16 pagesCastro Vazquez Lamar Arias Hernando Sebastian IEEE Journal of Emerging and Selected Topics in Power Eletronics 2019Humberto van OolNo ratings yet
- Cao Zhu Wu IEEE APEC 2020Document7 pagesCao Zhu Wu IEEE APEC 2020Humberto van OolNo ratings yet
- Gao Li Chong Mok IEEE Journal of Solid-State Circuits 2020Document11 pagesGao Li Chong Mok IEEE Journal of Solid-State Circuits 2020Humberto van OolNo ratings yet
- Vol02 Tab01Document130 pagesVol02 Tab01Kim Ill JeongNo ratings yet
- 03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)Document12 pages03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)juliancansenNo ratings yet
- Inverter 200e ManualDocument16 pagesInverter 200e ManualPascu AurelNo ratings yet
- Kmi REYRYDocument2 pagesKmi REYRYwatep_08No ratings yet
- Shahid Bin LatifDocument3 pagesShahid Bin LatifMuhammad Shahid LatifNo ratings yet
- Transformer Differential Protection ANSI Code 87 TDocument4 pagesTransformer Differential Protection ANSI Code 87 TFarooq KhanNo ratings yet
- Study On The Effect of The Substrate Material Type and Thickness On The Performance of The Filtering Antenna DesignDocument9 pagesStudy On The Effect of The Substrate Material Type and Thickness On The Performance of The Filtering Antenna Designمصطفى خالدNo ratings yet
- 8556 Service PDFDocument152 pages8556 Service PDFAndrás SzabóNo ratings yet
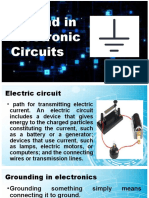
- Ground in ElectronicsDocument9 pagesGround in ElectronicsISABELO III ALFEREZNo ratings yet
- Atos Electronic DriversDocument6 pagesAtos Electronic DriversService - Anda Hydraulics Asia Pte LtdNo ratings yet
- Digital Control Strategy For Four Quadrant Operation of Three Phase BLDC Motor With Load VariationsDocument9 pagesDigital Control Strategy For Four Quadrant Operation of Three Phase BLDC Motor With Load VariationsGhada DahmoulNo ratings yet
- Polymobil Plus MergedDocument90 pagesPolymobil Plus MergedRO Na LDoNo ratings yet
- Distance Basics PDFDocument39 pagesDistance Basics PDFsurya892No ratings yet
- Section 4 Safety Switches: For More Information On These Products, Order Publications From Section 28Document36 pagesSection 4 Safety Switches: For More Information On These Products, Order Publications From Section 28franklin170194No ratings yet
- Kt-Lcd3: User Manual Ebike Special MeterDocument32 pagesKt-Lcd3: User Manual Ebike Special MeterTom HarkinsNo ratings yet
- Effects of Different Electrodes on Surface Roughness in EDMDocument24 pagesEffects of Different Electrodes on Surface Roughness in EDMical iculNo ratings yet
- Checkliste Druck en FD A9Document1 pageCheckliste Druck en FD A9Anonymous ggRTHDKe6No ratings yet
- STSPIN820: Advanced 256 Microsteps Integrated Motor Driver With Step-Clock and Direction InterfaceDocument29 pagesSTSPIN820: Advanced 256 Microsteps Integrated Motor Driver With Step-Clock and Direction InterfaceIsela LopezNo ratings yet
- Icharger MPPT 6048 ManualDocument2 pagesIcharger MPPT 6048 ManualAurintaNo ratings yet
- Your Amazing BrainDocument3 pagesYour Amazing BrainMarian Popa100% (1)
- Experimental Studies On The Plasma Bullet Propagation and Its InhDocument8 pagesExperimental Studies On The Plasma Bullet Propagation and Its InhvenuanandNo ratings yet
- Katalog Haupa StopiceDocument68 pagesKatalog Haupa StopiceRazvan TeleanuNo ratings yet
- Lab Report 1 MergedDocument15 pagesLab Report 1 MergedNasir AliNo ratings yet
- Measure Charge Flow with High Sensitivity Ballistic GalvanometerDocument4 pagesMeasure Charge Flow with High Sensitivity Ballistic GalvanometerMs.Ezhilarasi ICE DepartmentNo ratings yet
- 2nd Quarter Exam Smaw - Doc For PRINTDocument5 pages2nd Quarter Exam Smaw - Doc For PRINTSabas Quijada100% (3)
- Electric Motor PresentationDocument19 pagesElectric Motor PresentationAzhar Mansuri0% (2)
- ROM and Its Design Methods: An Overview: Jaspreet Kaur, Srishti Sabharwal, Shabnam Khan, Karan ChauhanDocument7 pagesROM and Its Design Methods: An Overview: Jaspreet Kaur, Srishti Sabharwal, Shabnam Khan, Karan ChauhanJaspreet KaurNo ratings yet
- Egat Smart Grid Roadmap Rev2Document37 pagesEgat Smart Grid Roadmap Rev2Lance Vanderhaven100% (1)
- Method of Procedure MOP FormDocument10 pagesMethod of Procedure MOP FormmarcipomoyfanNo ratings yet
- Certificazione sistema Qualità e classi ambientali e climatiche per trasformatore 1600 kVADocument4 pagesCertificazione sistema Qualità e classi ambientali e climatiche per trasformatore 1600 kVAfgdfgdfNo ratings yet