You might also like
- General Post OfficeDocument13 pagesGeneral Post OfficeEdward Jay Robin Belanger100% (5)
- Transportation Injuries (Review of Forensic Medicine and Toxicology, 2nd Edition)Document14 pagesTransportation Injuries (Review of Forensic Medicine and Toxicology, 2nd Edition)Antonio jose Garrido carvajalinoNo ratings yet
- 20HP Riding MowerDocument60 pages20HP Riding MowerSTPNo ratings yet
- MaxxPro PlusDocument2 pagesMaxxPro PlusDimitris Pantelous100% (1)
- 10 INFRALERT RAMS LCC AlvaroCalle CEMOSA1Document25 pages10 INFRALERT RAMS LCC AlvaroCalle CEMOSA1Tata OdoyNo ratings yet
- Tunnel Report v. 1.1Document616 pagesTunnel Report v. 1.1Rayees Ahmad100% (1)
- LAW ENFORCEMENT ADMINISTRATION POLICE PATROLDocument145 pagesLAW ENFORCEMENT ADMINISTRATION POLICE PATROLRoxanne CalabonNo ratings yet
- Tecnolift Catalogo EnglishDocument107 pagesTecnolift Catalogo Englishbonongx100% (1)
- Ibf Jsu Amosup Immaj Cba (2015-2017)Document47 pagesIbf Jsu Amosup Immaj Cba (2015-2017)HaroldRamosNo ratings yet
- Analysis of Mode Choice Affects From The Introduction of Doha Metro Using Machine Learning and Statistical Analysis (2023)Document16 pagesAnalysis of Mode Choice Affects From The Introduction of Doha Metro Using Machine Learning and Statistical Analysis (2023)andini arumNo ratings yet
- Sustainable City Plan Based On Planning Algorithm 2011 Procedia Social AnDocument9 pagesSustainable City Plan Based On Planning Algorithm 2011 Procedia Social AnPaola Giraldo MontoyaNo ratings yet
- Behavioural Issues in Pedestrian Speed Choice and Street Crossing Behaviour A ReviewDocument26 pagesBehavioural Issues in Pedestrian Speed Choice and Street Crossing Behaviour A ReviewJulian Andres Gutierrez LondoñoNo ratings yet
- An Application of RP-SP Data For Joint Estimation of Mode Choice ModelsDocument22 pagesAn Application of RP-SP Data For Joint Estimation of Mode Choice ModelsAsifNawazNo ratings yet
- Prediction of Public Transportation Occupation Based On Several Crowd Spots Using Ordinary Kriging MethodDocument13 pagesPrediction of Public Transportation Occupation Based On Several Crowd Spots Using Ordinary Kriging MethodRami HayekNo ratings yet
- QatarDocument8 pagesQatarMinh AnhNo ratings yet
- Pareto Efficient Strategies For Regulating Public Transit OperationsDocument15 pagesPareto Efficient Strategies For Regulating Public Transit OperationsMaru PabloNo ratings yet
- Centrality and Connectivity in Public Transport Networks and Their Significance For Transport Sustainability in CitiesDocument17 pagesCentrality and Connectivity in Public Transport Networks and Their Significance For Transport Sustainability in CitiesJCNo ratings yet
- Service, Income and Car Ownership.: ArticleDocument24 pagesService, Income and Car Ownership.: ArticleYASH PRAJAPATINo ratings yet
- Assessment On Volume Study of Public Transportation System of Khulna-City Road, Bangladesh: A Case Study of Boyra To Shib-Bari Mor MidblockDocument13 pagesAssessment On Volume Study of Public Transportation System of Khulna-City Road, Bangladesh: A Case Study of Boyra To Shib-Bari Mor Midblocknabanita debnathNo ratings yet
- Stochastic vs Deterministic Approaches Estimating Trips Rates HypermarketsDocument11 pagesStochastic vs Deterministic Approaches Estimating Trips Rates HypermarketsAnonymous koR9VtfNo ratings yet
- QUT RouteChoiceDocument15 pagesQUT RouteChoiceSiddharth GuptaNo ratings yet
- 1 s2.0 S1877705817318118 MainDocument10 pages1 s2.0 S1877705817318118 Main02nailahfzNo ratings yet
- Adjusting ITEs Trip Generation Handbook For UrbanDocument26 pagesAdjusting ITEs Trip Generation Handbook For UrbandiscolettoNo ratings yet
- Investigation of commuting trip timing and mode choice in Greater Toronto AreaDocument26 pagesInvestigation of commuting trip timing and mode choice in Greater Toronto AreafranhaNo ratings yet
- Freight Demand ModellingDocument8 pagesFreight Demand ModellingSwagata SarkarNo ratings yet
- A Comparative Discussion On Transportation Research Studies About Traffic Information Systems Within The Country and Foreign NationsDocument11 pagesA Comparative Discussion On Transportation Research Studies About Traffic Information Systems Within The Country and Foreign NationsEmmanuel LazoNo ratings yet
- Extended Abstact - Template CCTT2024Document7 pagesExtended Abstact - Template CCTT2024dagalvisNo ratings yet
- Paper Nina PDFDocument12 pagesPaper Nina PDFGianinna González ZepedaNo ratings yet
- Factors Affecting To Public Bus Transport Ridership: A Case of Capital ColomboDocument6 pagesFactors Affecting To Public Bus Transport Ridership: A Case of Capital ColomboYASH PRAJAPATINo ratings yet
- Preferences in Regional Public Transport: A Literature ReviewDocument16 pagesPreferences in Regional Public Transport: A Literature ReviewLord GrimNo ratings yet
- Public Transportation Improvement Validation Model For Metropolitan City KarachiDocument10 pagesPublic Transportation Improvement Validation Model For Metropolitan City KarachiShah HusainNo ratings yet
- Analysing Bus Passengers' Satisfaction in Dhaka Using Discrete Choice ModelsDocument16 pagesAnalysing Bus Passengers' Satisfaction in Dhaka Using Discrete Choice ModelsMamta KumariNo ratings yet
- Selection Criteria and Assessment of The Impact of Traffic Accessibility On The Development of SuburbsDocument23 pagesSelection Criteria and Assessment of The Impact of Traffic Accessibility On The Development of SuburbsGopalBanikNo ratings yet
- Comparative Analysis of Modal Distribution in Abia State, NigeriaDocument20 pagesComparative Analysis of Modal Distribution in Abia State, NigeriaumunakweNo ratings yet
- Chapter Two Review of Related Literature: Polytechnic University of The PhilippinesDocument7 pagesChapter Two Review of Related Literature: Polytechnic University of The PhilippinesJericho CabañalNo ratings yet
- Research On Passenger's Travel Mode Choice Behavior Waiting at Bus Station Based On SEM-Logit Integration ModelDocument23 pagesResearch On Passenger's Travel Mode Choice Behavior Waiting at Bus Station Based On SEM-Logit Integration ModelAsifNawazNo ratings yet
- 2.1. Literature Review of Measuring The Transit-Oriented Development LevelsDocument21 pages2.1. Literature Review of Measuring The Transit-Oriented Development LevelsJafar JalilovNo ratings yet
- A Framework and Model For Parking DecisionsDocument23 pagesA Framework and Model For Parking DecisionsLaurice MelepyanoNo ratings yet
- Commuter Preferences For A First Mile Last Mi 2023 Transportation Research PDocument23 pagesCommuter Preferences For A First Mile Last Mi 2023 Transportation Research PJose Luis Moreno GomezNo ratings yet
- Success Factors For Public Transport: The Role of Green CommunitiesDocument21 pagesSuccess Factors For Public Transport: The Role of Green CommunitieslauraNo ratings yet
- Case Studies On Transport Policy April 2017Document4 pagesCase Studies On Transport Policy April 2017Faizan PathanNo ratings yet
- Methodological Issues in Developing Mode Choice Models For Dhaka CityDocument22 pagesMethodological Issues in Developing Mode Choice Models For Dhaka Cityd-fbuser-58171984No ratings yet
- Transportation ModelsDocument65 pagesTransportation ModelsAnas R. Abu KashefNo ratings yet
- MScThesis JArendsen PublicDocument148 pagesMScThesis JArendsen Publicmaurits bosgoedNo ratings yet
- Land Use ForecastingDocument30 pagesLand Use ForecastingEnrique MárquezNo ratings yet
- Sustainability 11 04295 PublishedDocument24 pagesSustainability 11 04295 PublishedsatyamNo ratings yet
- Effect of Metro On Delhi's Urban FormDocument3 pagesEffect of Metro On Delhi's Urban FormPratiksha SinghNo ratings yet
- Factors Affecting The Service Quality in Public Bus Transportation in Sri LankaDocument8 pagesFactors Affecting The Service Quality in Public Bus Transportation in Sri LankaKumaresvaranNo ratings yet
- Strategic Planning Based On Sustainability For Urban Transportation: An Application To Decision-MakingDocument24 pagesStrategic Planning Based On Sustainability For Urban Transportation: An Application To Decision-MakingKaren LandazuriNo ratings yet
- Transportation Infrastructure Projects: From Conception To ImplementationDocument49 pagesTransportation Infrastructure Projects: From Conception To ImplementationParth doshiNo ratings yet
- 1 s2.0 S1877042813045655 Main PDFDocument10 pages1 s2.0 S1877042813045655 Main PDFSHERLY OKTAFIANo ratings yet
- Sustainability 12 04996 v2 PDFDocument17 pagesSustainability 12 04996 v2 PDFRico SwabeNo ratings yet
- Transportation Demand Management in A Deprived Territory: A Case Study in The North of FranceDocument12 pagesTransportation Demand Management in A Deprived Territory: A Case Study in The North of FranceBrayan MendezNo ratings yet
- Report No. 1Document104 pagesReport No. 1Thony CayNo ratings yet
- How To Improve Public Transport Usage in A Medium-Sized City: Key Factors For A Successful Bus SystemDocument13 pagesHow To Improve Public Transport Usage in A Medium-Sized City: Key Factors For A Successful Bus SystemWoke BlokeNo ratings yet
- IJRPR19123Document8 pagesIJRPR19123sushantnanaware2000No ratings yet
- Review Pedestrian Level of Service (2016)Document12 pagesReview Pedestrian Level of Service (2016)MONICA BARRERANo ratings yet
- City On The Move: Metro Rail Commuting SurveyDocument14 pagesCity On The Move: Metro Rail Commuting Surveyakibpagla001No ratings yet
- li2020Document13 pagesli2020hemlatabattulaNo ratings yet
- Estimating Value-of-Time Using Econometric ModelsDocument19 pagesEstimating Value-of-Time Using Econometric Modelsiciubotaru20002123100% (1)
- Case StudyDocument12 pagesCase StudyMikaNo ratings yet
- Modeling Intermodal Networks with Public Transport and Vehicle SharingDocument20 pagesModeling Intermodal Networks with Public Transport and Vehicle SharingegresarocksNo ratings yet
- Predicting Transit Mode Choice Behavior From Parents Perspectives: A Case Study in Lahore, PakistanDocument15 pagesPredicting Transit Mode Choice Behavior From Parents Perspectives: A Case Study in Lahore, PakistanRahim RajarNo ratings yet
- Cheba, Saniuk - 2016 - Urban Mobility - Identification, Measurement and Evaluation (2) - AnnotatedDocument10 pagesCheba, Saniuk - 2016 - Urban Mobility - Identification, Measurement and Evaluation (2) - AnnotatedMauricio QuinteroNo ratings yet
- Network Planning and Design For Public Transport SDocument18 pagesNetwork Planning and Design For Public Transport SsakhoNo ratings yet
- Integrating Paratransit as Feeder System into Urban TransitDocument22 pagesIntegrating Paratransit as Feeder System into Urban TransitAIILSG SataraNo ratings yet
- Time-Use Data, Analysis and Modeling Toward The Next Generation of Transportation Planning MethodologiesDocument11 pagesTime-Use Data, Analysis and Modeling Toward The Next Generation of Transportation Planning MethodologiesRidhima4No ratings yet
- Encouraging Public Transport Use To Reduce TrafficDocument8 pagesEncouraging Public Transport Use To Reduce TrafficPrince GuptaNo ratings yet
- Sustainable Parking Management: Practices, Policies, and MetricsFrom EverandSustainable Parking Management: Practices, Policies, and MetricsNo ratings yet
- STLC Standard Drawings 2010-03-01 PDFDocument177 pagesSTLC Standard Drawings 2010-03-01 PDFHussain Ahmed100% (1)
- Escavadora 200DLC PIN 1FF200DX D510001 Introducci NDocument4 pagesEscavadora 200DLC PIN 1FF200DX D510001 Introducci NDavid RamirezNo ratings yet
- U-Board Leader 2nd Edition RulebookDocument30 pagesU-Board Leader 2nd Edition RulebookDjordje MilovancevNo ratings yet
- ABAD MallDocument4 pagesABAD MalllvslistNo ratings yet
- Automatic side stand system retrieves standDocument25 pagesAutomatic side stand system retrieves standLeah Mae NolascoNo ratings yet
- WAREHOUSING DEEP DIVEDocument29 pagesWAREHOUSING DEEP DIVERadhika JaiswalNo ratings yet
- Isuzu BrochureDocument27 pagesIsuzu BrochuresafinditNo ratings yet
- Shell Cyprina Grease Ra: High Quality Lithium Soap GreaseDocument2 pagesShell Cyprina Grease Ra: High Quality Lithium Soap GreaseIvan KawempyNo ratings yet
- Octagonal Blender PDFDocument4 pagesOctagonal Blender PDFMohsinShaikhNo ratings yet
- Restoration of The Manayunk Canal - PWD PresentationDocument20 pagesRestoration of The Manayunk Canal - PWD PresentationdsrmanayunkNo ratings yet
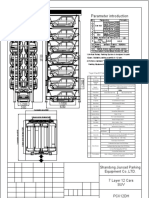
- Parameter Introduction: Shandong Jiuroad Parking Equipment Co.,LTDDocument1 pageParameter Introduction: Shandong Jiuroad Parking Equipment Co.,LTDDiego SanmartinNo ratings yet
- JDQRC Cessna C208B Grand Caravan EX QuickReferenceChart MultiDocument3 pagesJDQRC Cessna C208B Grand Caravan EX QuickReferenceChart MultiLucas AlvesNo ratings yet
- 2007 XC70 Brochure (US)Document40 pages2007 XC70 Brochure (US)markoNo ratings yet
- Ford Ranger 2.2L XLT MT 4x4 Price List - SarawakDocument2 pagesFord Ranger 2.2L XLT MT 4x4 Price List - SarawakmfmisikNo ratings yet
- Equipment Sheet: Oceangoing TugDocument2 pagesEquipment Sheet: Oceangoing TugKingsley UkohaNo ratings yet
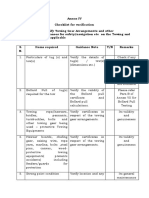
- Annexure 4 of Ms Notice 08Document8 pagesAnnexure 4 of Ms Notice 08naseemtycheNo ratings yet
- 10 TP 3 Transport GrabDocument3 pages10 TP 3 Transport GrabJika ArandiaNo ratings yet
- Delivery Booking Order Template in Excel Format1Document6 pagesDelivery Booking Order Template in Excel Format1Leydi Grandez RíosNo ratings yet
- Evaluation of Quality of Crushed-Limestone and - Siltstone For Road AggregatesDocument14 pagesEvaluation of Quality of Crushed-Limestone and - Siltstone For Road AggregatesCentral Department of GeologyNo ratings yet
- Online Booking - Booking ConfirmationDocument1 pageOnline Booking - Booking ConfirmationMOHAMED MILADNo ratings yet
- MANProgramGuide PDFDocument68 pagesMANProgramGuide PDFTirelessNo ratings yet