You might also like
- Polytec Vibrometer Controller OFV-5000Document121 pagesPolytec Vibrometer Controller OFV-5000vnetawzNo ratings yet
- Additional Exercises For Vectors, Matrices, and Least SquaresDocument41 pagesAdditional Exercises For Vectors, Matrices, and Least SquaresAlejandro Patiño RiveraNo ratings yet
- تقارير مختبر محركات احتراق داخليDocument19 pagesتقارير مختبر محركات احتراق داخليwesamNo ratings yet
- A Single SignOn Guide For SAP S4HANA Cloud, Private EditionDocument15 pagesA Single SignOn Guide For SAP S4HANA Cloud, Private EditionmutyalapatiNo ratings yet
- Fuzzy Expert Systems: Fuzzy InferenceDocument61 pagesFuzzy Expert Systems: Fuzzy InferenceMalinda VaniaNo ratings yet
- Fuzzy Expert Systems: Fuzzy Inference: Mamdani Fuzzy Inference Sugeno Fuzzy Inference Case StudyDocument61 pagesFuzzy Expert Systems: Fuzzy Inference: Mamdani Fuzzy Inference Sugeno Fuzzy Inference Case StudyHmz OussamaNo ratings yet
- Fuzzy InferenceDocument31 pagesFuzzy Inferenceakbar mirzaNo ratings yet
- Fuzzy Lecture05-Mamdani SugenoDocument51 pagesFuzzy Lecture05-Mamdani Sugenosetiono 90No ratings yet
- Fuzzy 2Document59 pagesFuzzy 2Katya BlindaNo ratings yet
- 4 Final - Fuzzy Logic - WSNDocument29 pages4 Final - Fuzzy Logic - WSNShashank MishraNo ratings yet
- Fuzzy Based Expert SystemsDocument26 pagesFuzzy Based Expert SystemsShivam GambhirNo ratings yet
- Fuzzy Inference SystemDocument42 pagesFuzzy Inference SystemOviya Ov100% (1)
- ML 08Document38 pagesML 08Dreadqueen RathianNo ratings yet
- CLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleDocument8 pagesCLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleSanjid ElahiNo ratings yet
- Assignment 2 DISC 322: Optimization Instructor: Kamran Rashid Mirza Ameen Hyder 19110262 Jawwad Hassan 19110282Document8 pagesAssignment 2 DISC 322: Optimization Instructor: Kamran Rashid Mirza Ameen Hyder 19110262 Jawwad Hassan 19110282Mirza Ameen HyderNo ratings yet
- MNO3701 SPC ExamplesDocument4 pagesMNO3701 SPC ExamplesMohamed YehiaNo ratings yet
- Class 3 - Normal DistributionDocument20 pagesClass 3 - Normal Distributionkabbilaash kumarNo ratings yet
- Practice 1Document3 pagesPractice 1bo chian chynNo ratings yet
- Random Forests: N 1 N J X A I X A IDocument12 pagesRandom Forests: N 1 N J X A I X A IendaleNo ratings yet
- ANSWERS Calculate Expected Return and Standard Deviation For Individual Stocks and PortfoliosDocument3 pagesANSWERS Calculate Expected Return and Standard Deviation For Individual Stocks and PortfoliosKashifNo ratings yet
- Statistics 500: Midterm 1 NameDocument6 pagesStatistics 500: Midterm 1 NameSouleymane CoulibalyNo ratings yet
- Linear Analytical Calibration Curve (Regression STD Dev LOD STD Add)Document25 pagesLinear Analytical Calibration Curve (Regression STD Dev LOD STD Add)Laryssa AlvesNo ratings yet
- Lec33 MetropolisHastingsDocument66 pagesLec33 MetropolisHastingshu jackNo ratings yet
- Case Project EconometricsDocument4 pagesCase Project EconometricsGarimaNo ratings yet
- Bound Algorithm AND ProblemDocument28 pagesBound Algorithm AND Problemvemuri sakethNo ratings yet
- Mod6 Design of Washing Machine and Air CondiDocument41 pagesMod6 Design of Washing Machine and Air CondiAnand SivaramNo ratings yet
- Chap 5Document35 pagesChap 5Maurice PolitisNo ratings yet
- Case Study FinalDocument13 pagesCase Study FinalRakesh bhukyaNo ratings yet
- An F Is Assignment 1 ReportDocument9 pagesAn F Is Assignment 1 ReportMahedi RajNo ratings yet
- DefuzzificationDocument55 pagesDefuzzificationAatmaj SalunkeNo ratings yet
- Bisection MethodDocument2 pagesBisection MethodMohammed al-mashabiNo ratings yet
- A123JS Marking, DTA123JSA DatasheetDocument4 pagesA123JS Marking, DTA123JSA DatasheetPowerLedPC Servicio Tecnico ElectronicoNo ratings yet
- Celierin Danise Q. StatDocument5 pagesCelierin Danise Q. StatHshsuadjwj HajqhwhahadNo ratings yet
- VHDL Slides For Cstruct Mux & DecoderDocument30 pagesVHDL Slides For Cstruct Mux & DecoderLiron lNo ratings yet
- Mamdani FISDocument4 pagesMamdani FISAn Ton-That0% (1)
- Shottky Barrier Diode: DiodesDocument4 pagesShottky Barrier Diode: Diodesאביאל ברביNo ratings yet
- Medical Image Steganography Using Nuclear Spin Generator 2020 StoyanovDocument12 pagesMedical Image Steganography Using Nuclear Spin Generator 2020 StoyanovSujithNo ratings yet
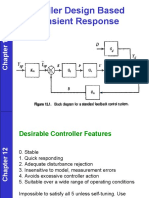
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- Normal DistributionsDocument20 pagesNormal DistributionsSanjay PareekNo ratings yet
- What Is The Tolerance Analysis - QRDocument15 pagesWhat Is The Tolerance Analysis - QRAnonymous tQhtrPbNo ratings yet
- Measurement of Index of Refraction Using SnellDocument5 pagesMeasurement of Index of Refraction Using SnellIzdihar JohariNo ratings yet
- Solving Laplace in PythonDocument4 pagesSolving Laplace in PythonShyam ShankarNo ratings yet
- Business Statistic Chapter 11Document11 pagesBusiness Statistic Chapter 11Noor Ainaa AzyanNo ratings yet
- Week 5: Laplace Equations: Aravind EE1 6B131 Electrical DeptDocument4 pagesWeek 5: Laplace Equations: Aravind EE1 6B131 Electrical DeptAravind VinasNo ratings yet
- Module On Standard Scores and The Normal CurveDocument27 pagesModule On Standard Scores and The Normal CurveUniversal CollabNo ratings yet
- MATH2089 NM Lectures Topic1Document14 pagesMATH2089 NM Lectures Topic1mbjanjua35No ratings yet
- ECON 809: Problem Set 1Document18 pagesECON 809: Problem Set 1Phan Van NamNo ratings yet
- Assignment R New 1Document26 pagesAssignment R New 1Sohel RanaNo ratings yet
- Schottky Barrier Diode: DiodesDocument4 pagesSchottky Barrier Diode: DiodesАлексей ГомоновNo ratings yet
- Latihan Standar Normal Random Variabel ZDocument3 pagesLatihan Standar Normal Random Variabel ZAchmatAfipudinNo ratings yet
- SMT Inductors: A Í Püééí A Í PüééíDocument9 pagesSMT Inductors: A Í Püééí A Í Püééíalvaro marrugoNo ratings yet
- Task#1: Generate The Binomial Distribution With FollowingDocument6 pagesTask#1: Generate The Binomial Distribution With FollowingMuhammad NaveedNo ratings yet
- Linear Programming Examples Using MatlabDocument8 pagesLinear Programming Examples Using MatlabAnu G KumarNo ratings yet
- Solutions Consolidated Feb 2023Document148 pagesSolutions Consolidated Feb 2023PhenyoRatsieNo ratings yet
- Lecture 21 - Sugeno Fuzzy ModelsDocument5 pagesLecture 21 - Sugeno Fuzzy ModelsAmmar AlkindyNo ratings yet
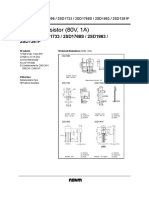
- Power Transistor (80V, 1A) : 2SD1898 / 2SD1733 / 2SD1768S / 2SD1863 / 2SD1381FDocument4 pagesPower Transistor (80V, 1A) : 2SD1898 / 2SD1733 / 2SD1768S / 2SD1863 / 2SD1381Fawesome 0No ratings yet
- Statistical Inference For Engineers and Data Scientists Solutions ManualDocument12 pagesStatistical Inference For Engineers and Data Scientists Solutions ManualJashaswini bhuyanNo ratings yet
- Quiz MarchDocument2 pagesQuiz Marchanon_31948370No ratings yet
- New Abyssinia CollegeDocument14 pagesNew Abyssinia CollegeE talkNo ratings yet
- 6c SMDDocument4 pages6c SMDMindSet MarcosNo ratings yet
- Running Head: REGRESSION ANALYSIS 1Document7 pagesRunning Head: REGRESSION ANALYSIS 1Brian JerryNo ratings yet
- Solutions Chapter6Document19 pagesSolutions Chapter6yitagesu eshetuNo ratings yet
- Cie-III Verilog HDL QPDocument2 pagesCie-III Verilog HDL QPvijayarani.katkamNo ratings yet
- Virtual Museums A Survey and Some IssuesDocument9 pagesVirtual Museums A Survey and Some IssuesCeaser SaidNo ratings yet
- Huawei FusionServer RH8100 V3 Data SheetDocument4 pagesHuawei FusionServer RH8100 V3 Data Sheetpramod BhattNo ratings yet
- BTech CS 4th Year SyllabusDocument19 pagesBTech CS 4th Year SyllabusRahul Kumar SInhaNo ratings yet
- PF Tutorial 1Document3 pagesPF Tutorial 1Parth SolankiNo ratings yet
- Dictionaries Godot GDScript Tutorial Ep 12 Godot TutorialsDocument4 pagesDictionaries Godot GDScript Tutorial Ep 12 Godot TutorialsChris LewinskyNo ratings yet
- Emerson Door Inverter ManualDocument107 pagesEmerson Door Inverter Manualhidyatama85% (27)
- Data AcquisitionDocument28 pagesData Acquisitionvkv.foeNo ratings yet
- Areva Manual Book p126-p127Document546 pagesAreva Manual Book p126-p127Vijayaganthaan VisvanatthanNo ratings yet
- OSN 8800 6800 3800 V100R010C00 Hardware Description 01 PDFDocument3,972 pagesOSN 8800 6800 3800 V100R010C00 Hardware Description 01 PDFdonekeo100% (1)
- AN1009: Driving MOSFET and IGBT Switches Using The Si828x: Key FeaturesDocument22 pagesAN1009: Driving MOSFET and IGBT Switches Using The Si828x: Key FeaturesNikolas AugustoNo ratings yet
- Tuguegarao Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceDocument7 pagesTuguegarao Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceNenbon NatividadNo ratings yet
- (Supervisor) Assistant Professor, E.C.E Department Gitam, VisakhapatnamDocument14 pages(Supervisor) Assistant Professor, E.C.E Department Gitam, VisakhapatnamG Sankara raoNo ratings yet
- Developing A Social Media Strategy: © RB Consulting 2010Document12 pagesDeveloping A Social Media Strategy: © RB Consulting 2010edetpickin1No ratings yet
- Catamsia 9.0 Cara InstallDocument2 pagesCatamsia 9.0 Cara InstalljohnsonNo ratings yet
- Coursera XQVQSBQSPQA5 - 2 PDFDocument1 pageCoursera XQVQSBQSPQA5 - 2 PDFAlexar89No ratings yet
- SBxx-1SP-US-40-IA-xx-16 Instruct ManDocument224 pagesSBxx-1SP-US-40-IA-xx-16 Instruct ManSmellyDog360No ratings yet
- Marketing Manager: at Aztec GroupDocument2 pagesMarketing Manager: at Aztec GroupAgnish GhatakNo ratings yet
- Psychology of Color2Document33 pagesPsychology of Color2abdikani abdilaahiNo ratings yet
- Dynapac Mini Roller - CC125Document14 pagesDynapac Mini Roller - CC125Iftequar Rizwan KhanNo ratings yet
- CAVLC ExampleDocument12 pagesCAVLC ExampleboujmiliNo ratings yet
- Oilfield Review January 1993Document59 pagesOilfield Review January 1993Andres PalladinoNo ratings yet
- OpenTaps in RetailDocument13 pagesOpenTaps in RetailtarunsainaniNo ratings yet
- Grade 9: Tle - Ict Computer Systems Servicing Quarter 2 - Module 1 Install Network CablesDocument6 pagesGrade 9: Tle - Ict Computer Systems Servicing Quarter 2 - Module 1 Install Network CablesSharmaine Paragas FaustinoNo ratings yet
- Process Data Sheet For Gas Oil Storage Tank (Tk-1101A/B) (Cheshme Shour Pump Station)Document4 pagesProcess Data Sheet For Gas Oil Storage Tank (Tk-1101A/B) (Cheshme Shour Pump Station)aliNo ratings yet
- Micro, Small and Medium Enterprises (MSME) : by Ankit Avasthi SirDocument6 pagesMicro, Small and Medium Enterprises (MSME) : by Ankit Avasthi SirMonty SharmaNo ratings yet
- Pucknell Vlsi Design PDF - CompressDocument2 pagesPucknell Vlsi Design PDF - CompressKotresh HothurNo ratings yet