You might also like
- SCADA: Supervisory Control and Data Acquisition, Fourth EditionFrom EverandSCADA: Supervisory Control and Data Acquisition, Fourth EditionRating: 4 out of 5 stars4/5 (8)
- Wireless PPR PRSNTTNDocument8 pagesWireless PPR PRSNTTNsd2808No ratings yet
- A Novel Approach For Fault and Drift Detection in Environmental IoT SensorsDocument13 pagesA Novel Approach For Fault and Drift Detection in Environmental IoT SensorsGhaida BouchâalaNo ratings yet
- Wireless Sensor Networks - Future of Wireless ApplicationsDocument11 pagesWireless Sensor Networks - Future of Wireless ApplicationssingaraNo ratings yet
- Sensors 15Document26 pagesSensors 15zack988No ratings yet
- Image Processing Based Detecting and Tracking For Security SystemDocument11 pagesImage Processing Based Detecting and Tracking For Security SystemAI Coordinator - CSC JournalsNo ratings yet
- Distributed Fault Detection of Wireless Sensor Networks: Jinran Chen, Shubha Kher, and Arun SomaniDocument7 pagesDistributed Fault Detection of Wireless Sensor Networks: Jinran Chen, Shubha Kher, and Arun SomaniBalaji SrikanthNo ratings yet
- Accelerometer Sensor Data Analysis of Bridge Structural Health Monitoring SystemDocument7 pagesAccelerometer Sensor Data Analysis of Bridge Structural Health Monitoring Systemshamsukarim2009No ratings yet
- Multisensor Fusion and Integration: Pankaj Dhumane and Shital BoraDocument5 pagesMultisensor Fusion and Integration: Pankaj Dhumane and Shital Borasapneswar pradhanNo ratings yet
- Unearthing The Compromised Nodes and Restoring Them in Wireless Sensor NetworkDocument6 pagesUnearthing The Compromised Nodes and Restoring Them in Wireless Sensor NetworkInternational Organization of Scientific Research (IOSR)No ratings yet
- Triplex SensorsDocument15 pagesTriplex Sensorswoof1800No ratings yet
- Project Report IOTDocument6 pagesProject Report IOTcrayzed2302No ratings yet
- Supervisory Control and Data Acquisition (Scada)Document10 pagesSupervisory Control and Data Acquisition (Scada)Aaron MerrillNo ratings yet
- Smart Greenhouse: A Real-Time Mobile Intelligent Monitoring System Based On WSNDocument5 pagesSmart Greenhouse: A Real-Time Mobile Intelligent Monitoring System Based On WSNAmit GuptaNo ratings yet
- Imouse Full ReportDocument21 pagesImouse Full ReportSimmi Joshi100% (2)
- Wireless Sensor Network Simulators A Survey and Comparisons: Harsh SundaniDocument17 pagesWireless Sensor Network Simulators A Survey and Comparisons: Harsh Sundanisafdar-abbasNo ratings yet
- Unconstrained Endpoint Security System: UeptssDocument12 pagesUnconstrained Endpoint Security System: UeptssAIRCC - IJNSANo ratings yet
- Bluetooth Based Wireless Sensor Networks - Implementation Issues and SolutionsDocument7 pagesBluetooth Based Wireless Sensor Networks - Implementation Issues and SolutionsSai Divya GoudNo ratings yet
- Multi Sensor Fusion and IntegrationDocument17 pagesMulti Sensor Fusion and IntegrationRuchi Singh RaghuvanshiNo ratings yet
- A Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentDocument13 pagesA Robust Observer For Sensor Faults Estimation On n-DOF Manipulator in Constrained Framework EnvironmentNinh DuyNo ratings yet
- Cupcarbon A Multi-Agent and Discrete EventDocument7 pagesCupcarbon A Multi-Agent and Discrete EventPaulo Renato XavierNo ratings yet
- Measurement: S. Lavanya, A. Prasanth, S. Jayachitra, A. ShenbagarajanDocument16 pagesMeasurement: S. Lavanya, A. Prasanth, S. Jayachitra, A. ShenbagarajanTomas JosephNo ratings yet
- Scada IntroductionDocument5 pagesScada IntroductionmuhammadmusakhanNo ratings yet
- Use of AANN For Signal ValidationDocument11 pagesUse of AANN For Signal ValidationSohom DattaNo ratings yet
- Comparative Study On Network Monitoring Tools: International Research Journal of Engineering and Technology (Irjet)Document3 pagesComparative Study On Network Monitoring Tools: International Research Journal of Engineering and Technology (Irjet)Irfaan Khan QasmiNo ratings yet
- WSN Unit 1Document22 pagesWSN Unit 1Gaurav bansodeNo ratings yet
- An Integrated Network Performance Monitor SystemDocument4 pagesAn Integrated Network Performance Monitor System9967835192No ratings yet
- Enabling Interoperability and Extensibility of Future SCADA SystemsDocument2 pagesEnabling Interoperability and Extensibility of Future SCADA Systemss_banerjeeNo ratings yet
- Sensors: Sensor Data Security Level Estimation Scheme For Wireless Sensor NetworksDocument33 pagesSensors: Sensor Data Security Level Estimation Scheme For Wireless Sensor Networksroro silalaNo ratings yet
- Integration of Ultrasonic Range Finder Technology With IoT For Smart Automated Door Control SystemsDocument8 pagesIntegration of Ultrasonic Range Finder Technology With IoT For Smart Automated Door Control SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Effective Network Monitoring Tool For Distributed NetworksDocument5 pagesAn Effective Network Monitoring Tool For Distributed NetworksEdgar MendezNo ratings yet
- Major Project SynopsisDocument7 pagesMajor Project SynopsisVipin DixitNo ratings yet
- SensorDocument2 pagesSensorguddianushaNo ratings yet
- Srinivas2021 Article AReviewArticleOnWirelessSensorDocument17 pagesSrinivas2021 Article AReviewArticleOnWirelessSensorBHAVANAM RAJA NANDININo ratings yet
- Implementation of Scada in Gas PipelineDocument14 pagesImplementation of Scada in Gas PipelinenwabukingzNo ratings yet
- Secured Aodv To Protect WSN Against Malicious IntrusionDocument13 pagesSecured Aodv To Protect WSN Against Malicious IntrusionAIRCC - IJNSANo ratings yet
- Researchpaper Super Capacitor Based Energy Harvesting System For Wireless Sensor NodeDocument15 pagesResearchpaper Super Capacitor Based Energy Harvesting System For Wireless Sensor NodeSumaya ShinosNo ratings yet
- An Agent-Based Bayesian Forecasting Model For Enhanced Network SecurityDocument8 pagesAn Agent-Based Bayesian Forecasting Model For Enhanced Network SecurityDwi Amalia Purnama SariNo ratings yet
- Sensor NetworksDocument19 pagesSensor NetworksSovan ChakrabortyNo ratings yet
- Wireless Sensor Network Security Model Using Zero Knowledge ProtocolDocument5 pagesWireless Sensor Network Security Model Using Zero Knowledge ProtocolIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- 1) - System VulnerabilityDocument7 pages1) - System Vulnerabilitykanaiya valviNo ratings yet
- Smart DevicesDocument16 pagesSmart DevicesmanojchandrasekharanNo ratings yet
- Bridge StructureDocument6 pagesBridge StructureJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- An Algorithmic Framework For Robust Access Control in Wireless Sensor NetworksDocument8 pagesAn Algorithmic Framework For Robust Access Control in Wireless Sensor NetworksChris TienNo ratings yet
- Smart Sensor Plug and PlayDocument10 pagesSmart Sensor Plug and Playanuj1166No ratings yet
- Wireless Sensor Networks: Security, Attacks and ChallengesDocument13 pagesWireless Sensor Networks: Security, Attacks and ChallengesPradip KumarNo ratings yet
- Network-Security Monitoring - 2017Document22 pagesNetwork-Security Monitoring - 2017Jeison ZapataNo ratings yet
- Mini Project12Document13 pagesMini Project12DigitaltechNo ratings yet
- Development of An Integrated Wireless Sensor Network Micro-Environmental Monitoring SystemDocument9 pagesDevelopment of An Integrated Wireless Sensor Network Micro-Environmental Monitoring SystemMackenzie AlexanderNo ratings yet
- Discovery of Ranking of Fraud For Mobile AppsDocument30 pagesDiscovery of Ranking of Fraud For Mobile AppsAnonymous DaOb6ElYNo ratings yet
- Detecting Malicious Data Injections in Wireless Sensor Networks: A SurveDocument33 pagesDetecting Malicious Data Injections in Wireless Sensor Networks: A Survevittorio.paolo.illianoNo ratings yet
- Jurnal 11 PtiDocument30 pagesJurnal 11 PtiG. S. ThornhillNo ratings yet
- Roman B Fosad09Document50 pagesRoman B Fosad09Rejeesh RaveendranNo ratings yet
- An Agent-Based Bayesian Forecasting Model For Enhanced Network SecurityDocument8 pagesAn Agent-Based Bayesian Forecasting Model For Enhanced Network SecuritySudheer VarmaNo ratings yet
- The Art of Network Monitoring: Figure 1: Problem Solving With Network Monitoring (Network Probe, 2006)Document6 pagesThe Art of Network Monitoring: Figure 1: Problem Solving With Network Monitoring (Network Probe, 2006)rolands7No ratings yet
- Chen 2008Document5 pagesChen 2008Abhinandan JainNo ratings yet
- IoT Based Patient Health Monitoring SystemDocument4 pagesIoT Based Patient Health Monitoring SystemAnonymous kw8Yrp0R5rNo ratings yet
- Wireless Sensor/Actuator Network Design For Mobile Control ApplicationsDocument17 pagesWireless Sensor/Actuator Network Design For Mobile Control Applicationsshiferu lemmaaNo ratings yet
- Development of A Generic and Flexible Human Body Wireless Sensor NetworkDocument4 pagesDevelopment of A Generic and Flexible Human Body Wireless Sensor NetworkKonstantinidis EvdokimosNo ratings yet
- Lightweight Intrusion Detection For WireDocument21 pagesLightweight Intrusion Detection For WireIsmail MainboyNo ratings yet
- Wireless Network Security SoftwareDocument6 pagesWireless Network Security SoftwareIsmail MainboyNo ratings yet
- Anomaly Based Intrusion Detection AlgoriDocument12 pagesAnomaly Based Intrusion Detection AlgoriIsmail MainboyNo ratings yet
- Computer Science SIWES REPORT 2Document26 pagesComputer Science SIWES REPORT 2Ismail Mainboy100% (4)
- SIWES Report For Computer ScienceDocument34 pagesSIWES Report For Computer ScienceIsmail Mainboy90% (51)
- Computer Science SIWES REPORTDocument30 pagesComputer Science SIWES REPORTIsmail Mainboy91% (22)
- SIWES REPORT On 3-d PrintingDocument27 pagesSIWES REPORT On 3-d PrintingIsmail Mainboy100% (2)
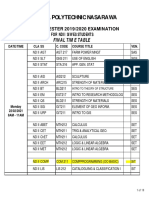
- Federal Polytechnic Nasarawa: Final Time TableDocument10 pagesFederal Polytechnic Nasarawa: Final Time TableIsmail MainboyNo ratings yet
- Siwes Report On Microsoft Visual BasicDocument43 pagesSiwes Report On Microsoft Visual BasicIsmail Mainboy100% (1)
- Face Recognition Based Attendance SystemDocument11 pagesFace Recognition Based Attendance SystemRajan ThakurNo ratings yet
- Anywhere-Anytime Signals and Systems Laboratory, Second EditionDocument273 pagesAnywhere-Anytime Signals and Systems Laboratory, Second EditionAizzaac0% (1)
- TP-LSMULTI SDK Programmer's ManualDocument40 pagesTP-LSMULTI SDK Programmer's ManualrayakinantiNo ratings yet
- ARQ ReportDocument47 pagesARQ ReportNandita IyerNo ratings yet
- File ListDocument150 pagesFile ListVukoon WanNo ratings yet
- Hikvision Discos Vídeo Vigilancia: HiklookDocument8 pagesHikvision Discos Vídeo Vigilancia: HiklookIglesia Cristiana Bautista Jerusalen de CaliNo ratings yet
- Rules To Ensure Accurate Post Processor Reference GuidesDocument11 pagesRules To Ensure Accurate Post Processor Reference GuidesBubbleNo ratings yet
- AFP in The Control-D Environment 9.0.01 Implementation GuideDocument78 pagesAFP in The Control-D Environment 9.0.01 Implementation GuideIlyasuddin ShaikhNo ratings yet
- Hpgl2-Encad NovaJet 750Document10 pagesHpgl2-Encad NovaJet 750andreioniNo ratings yet
- MatrikonOPC Server For GE Turbines User Manual PDFDocument193 pagesMatrikonOPC Server For GE Turbines User Manual PDFaustintanNo ratings yet
- Red - Hat - Virtualization 4.4 Release - Notes en UsDocument97 pagesRed - Hat - Virtualization 4.4 Release - Notes en UsGNo ratings yet
- CV Examples Uk Kitchen PorterDocument6 pagesCV Examples Uk Kitchen Porterafiwjsazh100% (2)
- Final Performance Task: "Moving Toward Computing at The Speed of Thought"Document2 pagesFinal Performance Task: "Moving Toward Computing at The Speed of Thought"Jennelyn TadleNo ratings yet
- Regional Group ProjectsDocument3 pagesRegional Group Projectsclasesespiritules44No ratings yet
- HP Laserjet 1320 Series PrinterDocument4 pagesHP Laserjet 1320 Series PrinterSheharyar MughalNo ratings yet
- 3-Warehouse Inventory Management SystemDocument52 pages3-Warehouse Inventory Management SystemCHIRAG BODHNo ratings yet
- Virtual Reality Data Modeling and Kinging of Frequeniosn Part 11 Lcoation Peennaa 18Document7 pagesVirtual Reality Data Modeling and Kinging of Frequeniosn Part 11 Lcoation Peennaa 18Usama YahyaNo ratings yet
- Prelim LectureDocument12 pagesPrelim LectureKimberly Quin CanasNo ratings yet
- Smith Micro Moh-WPS OfficeDocument3 pagesSmith Micro Moh-WPS OfficeMk AkangbeNo ratings yet
- Beginning R, 2nd Edition PDFDocument337 pagesBeginning R, 2nd Edition PDFAndrés Ayala0% (1)
- Sunway - Hotel Booking WordPress Theme DocumentationDocument123 pagesSunway - Hotel Booking WordPress Theme DocumentationITF JaafarNo ratings yet
- Using Oracle Autonomous Database Serverless 71 80Document10 pagesUsing Oracle Autonomous Database Serverless 71 80hammadyazan16No ratings yet
- Introduction To Miscrosoft Word: Definition of Microsoft WordDocument12 pagesIntroduction To Miscrosoft Word: Definition of Microsoft WordMustapha MuhammadNo ratings yet
- Chartpilot 1100 Manual (New UPDATE 2017)Document442 pagesChartpilot 1100 Manual (New UPDATE 2017)Buzatu Mircea100% (6)
- CygNet 95 Release NotesDocument42 pagesCygNet 95 Release NotesEDUARDO ARMANDO RODRIGUEZ VASQUEZNo ratings yet
- Labsheet 7Document27 pagesLabsheet 7nurulliyanaNo ratings yet
- I-Byte Technology July 2021Document56 pagesI-Byte Technology July 2021IT ShadesNo ratings yet
- Game LogDocument21 pagesGame LogAlberto Martin RomeroNo ratings yet
- M7C51v1 0Document148 pagesM7C51v1 0gapiangcoNo ratings yet
- OpenACC 3Document23 pagesOpenACC 3plopNo ratings yet
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZFrom EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNo ratings yet
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsFrom EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNo ratings yet
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Mastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionFrom EverandMastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionNo ratings yet
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)