You might also like
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- 2023 Wiley SCIEDocument8 pages2023 Wiley SCIE1915607No ratings yet
- A Fast Algorithm For Matrix Balancing: AbstractDocument18 pagesA Fast Algorithm For Matrix Balancing: AbstractFagner SutelNo ratings yet
- AIMS2022 Two New Generalized Iteration Methods For Solving AVE Using M-Matrix 2022Document12 pagesAIMS2022 Two New Generalized Iteration Methods For Solving AVE Using M-Matrix 20221915607No ratings yet
- Hindawi2022 Numerical Solution of AVEDocument9 pagesHindawi2022 Numerical Solution of AVE1915607No ratings yet
- J Wavemoti 2019 05 006Document38 pagesJ Wavemoti 2019 05 006safaa.elgharbi1903No ratings yet
- Third China Li-HuaDocument14 pagesThird China Li-HuakaosanhumamNo ratings yet
- Application of Laplace-Adomian Decomposition MethoDocument17 pagesApplication of Laplace-Adomian Decomposition Methomudassirahmad 2413.21No ratings yet
- Perturbation MethodDocument42 pagesPerturbation Methodyonghao liuNo ratings yet
- 8811 Acceleration Via Symplectic Discretization of High Resolution Differential EquationsDocument9 pages8811 Acceleration Via Symplectic Discretization of High Resolution Differential EquationsPol MestresNo ratings yet
- Ijmsi v11n2p71 en - 2Document16 pagesIjmsi v11n2p71 en - 2aliNo ratings yet
- Iterative Methods For Solving Absolute Value Equations-1638973373Document9 pagesIterative Methods For Solving Absolute Value Equations-16389733731915607No ratings yet
- Convergence of the generalized-α scheme for constrained mechanical systemsDocument18 pagesConvergence of the generalized-α scheme for constrained mechanical systemsCesar HernandezNo ratings yet
- Amc LrsweDocument29 pagesAmc LrsweSwagata BhaumikNo ratings yet
- Modified Hestenes-Stiefel Method for Monotone EquationsDocument14 pagesModified Hestenes-Stiefel Method for Monotone EquationsHAFIZ LAWAL IBRAHIMNo ratings yet
- A Non-Linear Multigrid Method For The Steady Euler EquationsDocument22 pagesA Non-Linear Multigrid Method For The Steady Euler EquationsYann DelormeNo ratings yet
- NUMERICAL SOLUTION OF INITIAL VALUE PROBLEMSDocument32 pagesNUMERICAL SOLUTION OF INITIAL VALUE PROBLEMSmitch_g_101No ratings yet
- CO25Document7 pagesCO25Archie BrownNo ratings yet
- Applied Mathematics and MechanicsDocument10 pagesApplied Mathematics and Mechanicsinam vfNo ratings yet
- Cauchy Best of Best Est-P-9Document22 pagesCauchy Best of Best Est-P-9sahlewel weldemichaelNo ratings yet
- Solving Integer Linear Programming Problems With Fully Rough IntervalsDocument17 pagesSolving Integer Linear Programming Problems With Fully Rough IntervalssdfrNo ratings yet
- Aula 7 - Teoria de Cordas MITDocument7 pagesAula 7 - Teoria de Cordas MITErick MouraNo ratings yet
- Numerical Simulation of Unsteady MHD Flows and Applications: R. Abgrall, R. Huart, P. RametDocument7 pagesNumerical Simulation of Unsteady MHD Flows and Applications: R. Abgrall, R. Huart, P. Rametakhu_79No ratings yet
- Convergence Acceleration of Alternating SeriesDocument10 pagesConvergence Acceleration of Alternating SeriesblablityNo ratings yet
- An Efficient Itterative Method Based On 2 Stage Spliting Method To Solve Weakly Nonlinear SystemsDocument17 pagesAn Efficient Itterative Method Based On 2 Stage Spliting Method To Solve Weakly Nonlinear SystemsSIDDHARTH MITRANo ratings yet
- 1 s2.0 S089396592300321X MainDocument7 pages1 s2.0 S089396592300321X MainD PattiasinaNo ratings yet
- Reconstruction of Variational Iterative Method For Solving Fifth Order Caudrey-Dodd-Gibbon (CDG) EquationDocument4 pagesReconstruction of Variational Iterative Method For Solving Fifth Order Caudrey-Dodd-Gibbon (CDG) EquationInternational Journal of Science and Engineering InvestigationsNo ratings yet
- Ph.D. Research Proposal on Solving Nonlinear Operator Equations via Iterative ProcessesDocument4 pagesPh.D. Research Proposal on Solving Nonlinear Operator Equations via Iterative ProcessesZahid RahmanNo ratings yet
- Successive Linearization Solution of ADocument9 pagesSuccessive Linearization Solution of AAnonymous lVQ83F8mCNo ratings yet
- Numerical Simulation of The Navier Stoke EquationDocument18 pagesNumerical Simulation of The Navier Stoke EquationLitan Kumar SahaNo ratings yet
- Galerkin-Wavelet Methods For Two-Point Boundary Value ProblemsDocument22 pagesGalerkin-Wavelet Methods For Two-Point Boundary Value ProblemsAlloula AlaeNo ratings yet
- 10.3934%2Fdcdss.2023083Document14 pages10.3934%2Fdcdss.2023083acoronelNo ratings yet
- Spacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaDocument13 pagesSpacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaCarlos Cesar ArandaNo ratings yet
- Project Navier StokesDocument26 pagesProject Navier StokesYves GarnardNo ratings yet
- Actuator Disc Model Using A Modified Rhie-Chow/SIMPLE Pressure Correction Algorithm. Comparison With Analytical SolutionsDocument11 pagesActuator Disc Model Using A Modified Rhie-Chow/SIMPLE Pressure Correction Algorithm. Comparison With Analytical Solutionspierre_elouanNo ratings yet
- Energy Principles and Finite Element Methods For PDocument15 pagesEnergy Principles and Finite Element Methods For Paarvee.armoorNo ratings yet
- Constrained Location Algorithm Using TDOADocument3 pagesConstrained Location Algorithm Using TDOAEdi SukriansyahNo ratings yet
- ADOMIAN Decomposition Method For Solvin1Document18 pagesADOMIAN Decomposition Method For Solvin1Susi SusilowatiNo ratings yet
- Regularization Paths For Generalized Linear Models Via Coordinate DescentDocument24 pagesRegularization Paths For Generalized Linear Models Via Coordinate DescentliuNo ratings yet
- An Efficient One Dimensional Parabolic Equation Solver Using Parallel ComputingDocument15 pagesAn Efficient One Dimensional Parabolic Equation Solver Using Parallel Computinghelloworld1984No ratings yet
- Wasi 2020Document9 pagesWasi 2020ZULFATIN NAFISAHNo ratings yet
- An Improved Heaviside Approach To Partial Fraction Expansion and Its ApplicationsDocument3 pagesAn Improved Heaviside Approach To Partial Fraction Expansion and Its ApplicationsDong Ju ShinNo ratings yet
- Eng DesignDocument9 pagesEng DesignOyungerel BalgansurenNo ratings yet
- Aif 1605Document38 pagesAif 1605catapdf3No ratings yet
- Alternating Direction Implicit Osc Scheme For The Two-Dimensional Fractional Evolution Equation With A Weakly Singular KernelDocument23 pagesAlternating Direction Implicit Osc Scheme For The Two-Dimensional Fractional Evolution Equation With A Weakly Singular KernelNo FaceNo ratings yet
- Iterative Methods of Richardson-Lucy-type For Image DeblurringDocument15 pagesIterative Methods of Richardson-Lucy-type For Image DeblurringhilmanmuntahaNo ratings yet
- Iterative Methods for Solving Matrix EquationsDocument13 pagesIterative Methods for Solving Matrix EquationsPranendu MaitiNo ratings yet
- Research Article: Numerical Solution of Two-Point Boundary Value Problems by Interpolating Subdivision SchemesDocument14 pagesResearch Article: Numerical Solution of Two-Point Boundary Value Problems by Interpolating Subdivision SchemesSyeda Tehmina EjazNo ratings yet
- CS450: Project For 4 Credit Option Due 5 PM Wednesday, December 16, 2015Document2 pagesCS450: Project For 4 Credit Option Due 5 PM Wednesday, December 16, 2015Sandeep Ravikumar MurthyNo ratings yet
- Mathematics 11 02069Document8 pagesMathematics 11 02069Uzair khanNo ratings yet
- BASIC ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMSDocument33 pagesBASIC ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMSradoevNo ratings yet
- Numerical Solution of Regularized Long-Wave EquationDocument8 pagesNumerical Solution of Regularized Long-Wave EquationNavdeep GoelNo ratings yet
- Type IIB Flux Compactifications On Twistor Bundles: Ali ImaanpurDocument12 pagesType IIB Flux Compactifications On Twistor Bundles: Ali ImaanpurcrocoaliNo ratings yet
- 2014, Article, Modelling High Speed Viscous Flow in OpenFOAMDocument13 pages2014, Article, Modelling High Speed Viscous Flow in OpenFOAMAnıl KüçükNo ratings yet
- Ericksen-Leslie system global existenceDocument22 pagesEricksen-Leslie system global existenceFran MartinezNo ratings yet
- Steady Open Channel Test Problemswith Analytic Solutions: I Macdonald, M J Baines, N K Nichols and P G Samuels 3/95Document23 pagesSteady Open Channel Test Problemswith Analytic Solutions: I Macdonald, M J Baines, N K Nichols and P G Samuels 3/95muazeemKNo ratings yet
- 2-Extended G'GDocument6 pages2-Extended G'GNagehanNo ratings yet
- Symmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationDocument15 pagesSymmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationEDU CIPANANo ratings yet
- Using Automatic Differentiation For Adjoint CFD Code DevelopmentDocument9 pagesUsing Automatic Differentiation For Adjoint CFD Code DevelopmentminhtrieudoddtNo ratings yet
- An Implicit Difference Scheme For The Fourth-Order Nonlinear Partial Integro-Differential EquationsDocument25 pagesAn Implicit Difference Scheme For The Fourth-Order Nonlinear Partial Integro-Differential EquationstuljabhavanikfpcNo ratings yet
- BDA Simp TieDocument2 pagesBDA Simp Tiedeekshithj ShettyNo ratings yet
- Module 4: Physical Layer: Introduction To Networks v7.0 (ITN)Document40 pagesModule 4: Physical Layer: Introduction To Networks v7.0 (ITN)Ayesha LataNo ratings yet
- Genius Amazon Savings HackDocument2 pagesGenius Amazon Savings Hackc0d3xploitationNo ratings yet
- DX DiagDocument34 pagesDX DiagChrismaNo ratings yet
- Practical Research 2Document15 pagesPractical Research 2Jay MendozaNo ratings yet
- TOPOLOGYDocument9 pagesTOPOLOGYLeonardo Noran JrNo ratings yet
- Mark XIIA Identification Friend or Foe (IFF) Mode 5Document4 pagesMark XIIA Identification Friend or Foe (IFF) Mode 5joma11No ratings yet
- Chapter 1 5Document98 pagesChapter 1 5Bryan BallesterosNo ratings yet
- LiFi Technology Provides High Speed Connectivity With Numerous ApplicationsDocument4 pagesLiFi Technology Provides High Speed Connectivity With Numerous ApplicationsmahioNo ratings yet
- FUNCTIONSDocument16 pagesFUNCTIONSHero KardeşlerNo ratings yet
- Class Project P1 - Ph.1 - InitiatingDocument96 pagesClass Project P1 - Ph.1 - InitiatingMontellia GantNo ratings yet
- Ims DBDocument48 pagesIms DBAle GomesNo ratings yet
- AcpcDocument13 pagesAcpcVishvas SutharNo ratings yet
- Unit 6 Face RecognitionDocument5 pagesUnit 6 Face RecognitionDai NgoNo ratings yet
- SAP Analytics Cloud - Landscape Architecture and Life-Cycle ManagementDocument57 pagesSAP Analytics Cloud - Landscape Architecture and Life-Cycle ManagementtataxpNo ratings yet
- Irules 101 01 Introduction To IrulesDocument3 pagesIrules 101 01 Introduction To IrulesKishore KumarNo ratings yet
- CssDocument3 pagesCssShhBansheeNo ratings yet
- Quality World Map Mod - Vivid & Paper StylesDocument2 pagesQuality World Map Mod - Vivid & Paper StylesMarko KcNo ratings yet
- Sel 2401Document2 pagesSel 2401Daniel RoyoNo ratings yet
- RishabhJhapython Labs pt2Document40 pagesRishabhJhapython Labs pt2Rishabh Jha freestylerNo ratings yet
- Siemens InterupteurDocument22 pagesSiemens InterupteurA DNo ratings yet
- Re 1Document1 pageRe 1onib oiNo ratings yet
- Chapter 2 Network ModelDocument51 pagesChapter 2 Network ModelMehedi AhamedNo ratings yet
- How Oracle Stores PasswordsDocument12 pagesHow Oracle Stores PasswordspbNo ratings yet
- Z50 BrochureDocument2 pagesZ50 Brochureraul100% (1)
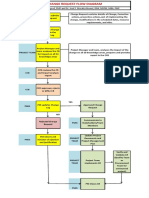
- Change Request Flow DiagramDocument2 pagesChange Request Flow DiagramSwapnil0% (1)
- Fusion Lab Install InstructionsDocument6 pagesFusion Lab Install Instructionsmamai nebeNo ratings yet
- Spatial Filters in Image ProcessingDocument68 pagesSpatial Filters in Image ProcessingMudassir RafiqNo ratings yet
- Fiber Doctor System Introduction ISSUE 1.30 - NCEDocument55 pagesFiber Doctor System Introduction ISSUE 1.30 - NCErafael antonio padilla mayorgaNo ratings yet
- MNIT Jaipur Online Training Placement Management System Project ReportDocument25 pagesMNIT Jaipur Online Training Placement Management System Project Reportanantha innanjeNo ratings yet